
- 1人工智能(第三版)—【第三章】讨论题_人工智能启发式搜索
- 2linux内核态获取ip地址,嵌入式linux通过DHCP自动获取IP地址
- 3利用计算机对人脸进行识别的应用领域是,计算机人脸识别技术及应用简析
- 4python爬虫_正则表达式获取天气预报并用echarts折线图显示_python天气折线图
- 5AWS re:Invent 2023-亚马逊云科技全球年度技术盛会_aws reinvent 2023
- 6计算机网络 —— 一文搞懂TCP/UDP_网络协议号
- 7区块链的发展趋势,并对C++与区块链相结合进行介绍_c++在区块链领域怎么样
- 8windows能ssh连接吗?_windows服务器如果没有装openssh能用ssh访问吗
- 9Spring+SpringMVC+MP登录案例(含拦截器)_mp的拦截器拦截
- 1010-flink-java实现nc(netcat)程序_使用linux系统自带的nc程序模拟生成数据流,不断产生单词并发送出去。编写flink程
无人机|四旋翼运动动力学建模及位置控制仿真_无人机位置环仿真
赞
踩
前言
本文将实现对无人机动力学以及运动学的公式推导完成建模,该模型以电机转速为输入,以无人机的状态量为输出。并在此基础上实现位置控制,以期望位置作为输入,使用串级pid结合无人机模型生成控制指令并对无人机进行控制。
无人机模型推导
对于任意刚体运动,均可分解为转动和平动,其中转动由动力学模型进行分析,平动可由运动学模型进行分析。对于无人机的糕体运动,如下示意

其中合力以及合力锯均由电机带动浆的转动产生
在忽略阻力、保证无人机小角度飞行的情况下,对无人机进行建模
在无人机机体系下,得到合力以及合力矩
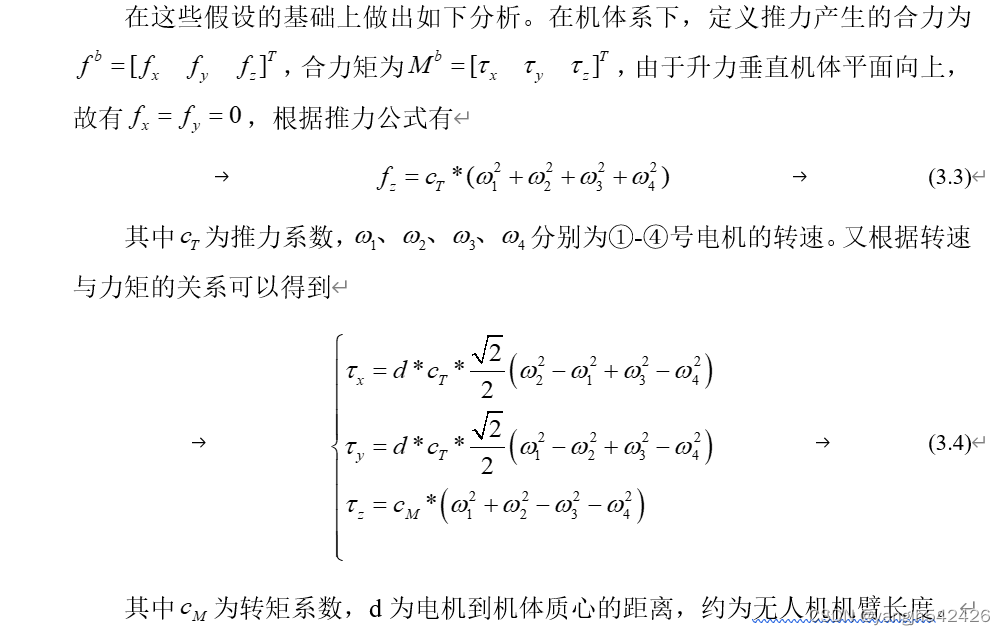
动力学模型

带入并化简得
定义姿态角为机体系按ZYX旋转与惯性系平行时绕各轴的旋转角度
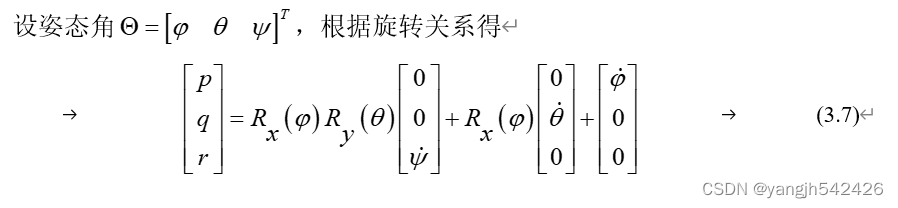
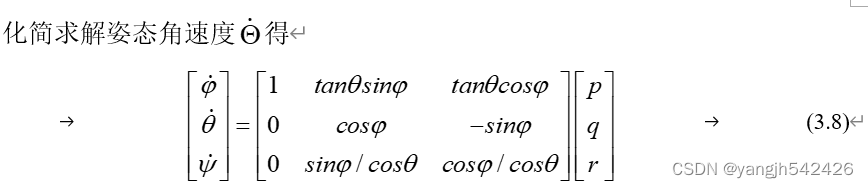
求解旋转矩阵并化简
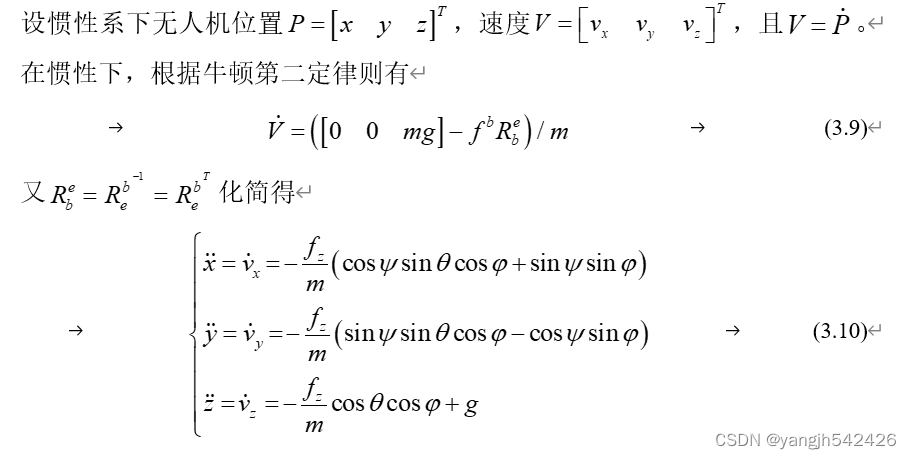
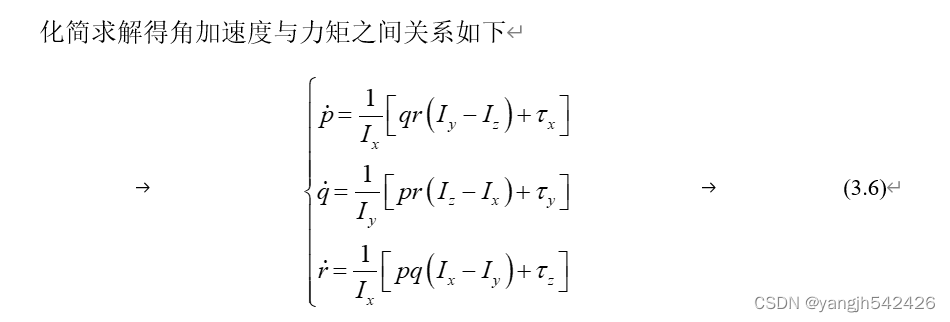
由此求解得到无人机动力学模型
运动学模型
在不考虑外部扰动的情况下,加速度积分为速度,速度积分为位移,此时无人机的运动学模型为简单二阶模型。
无人机模型仿真
由上面推到过程可以得到,无人机模型主要分为电机转速-力及力矩、力及力矩-角加速度、角加速度-角速度、角速度-姿态角速度、姿态角速度-姿态角、姿态角-加速度、加速度-速度、速度-位置等环节,其中位置、速度、角速度、姿态角、角速度为无人机模型常用状态量,通过对这些状态量进行反馈实现对无人机的闭环控制
整体架构如下
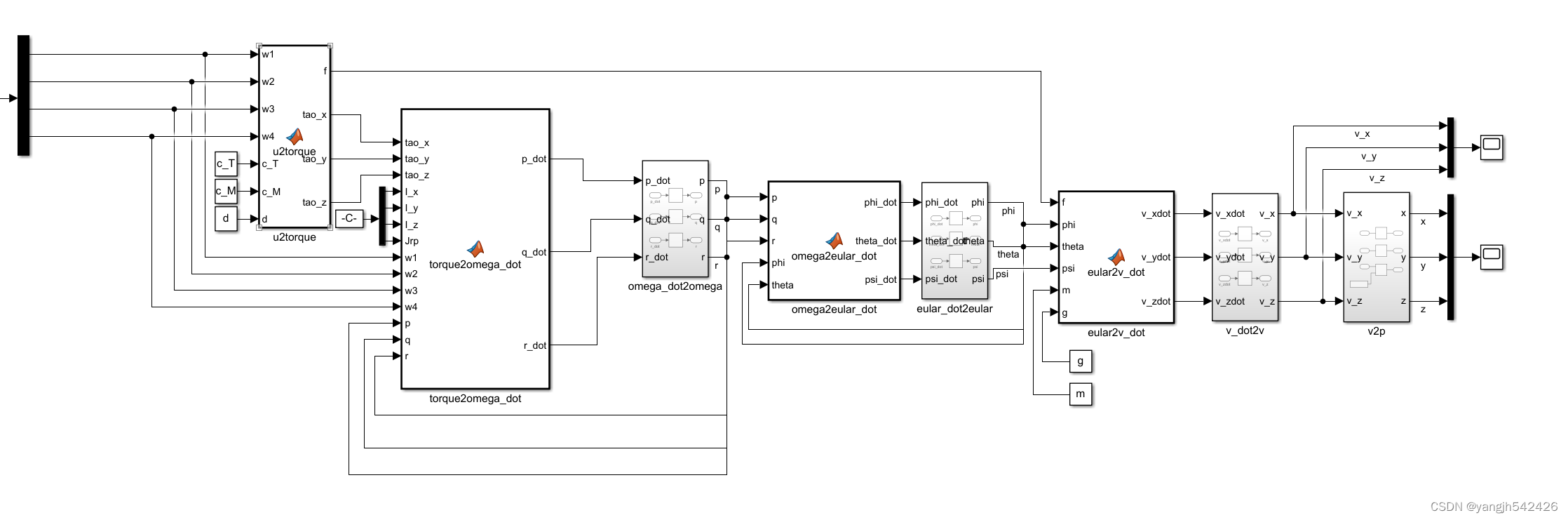
各模块均用MATLAB Fuction模块进行实现。
控制器设计
本仿真使用简单的串级PID进行无人机位置控制,并将无人机模型简化为输入为合理及力矩的对象,集成为一个标明输入输出的模块,如
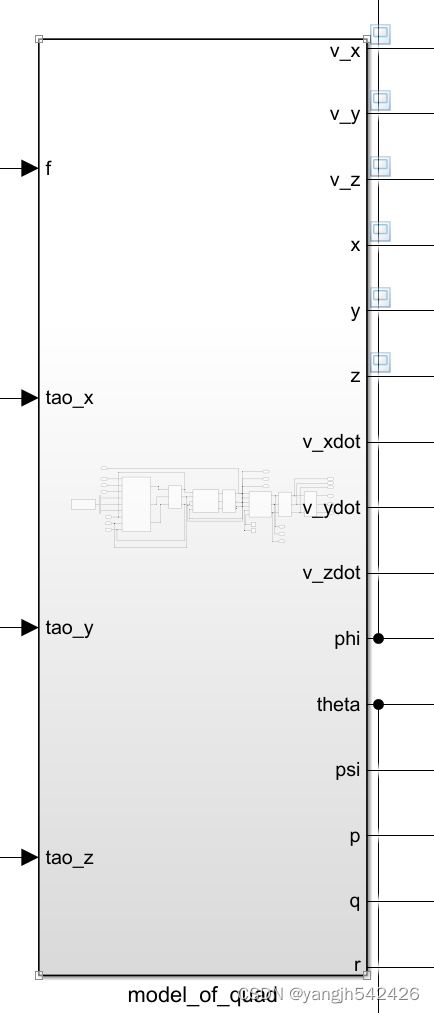
即以力和力矩作为无人机模型的输入,以15个状态量作为输出,并分别反馈至位置速度控制器以及姿态控制器。整体框架如
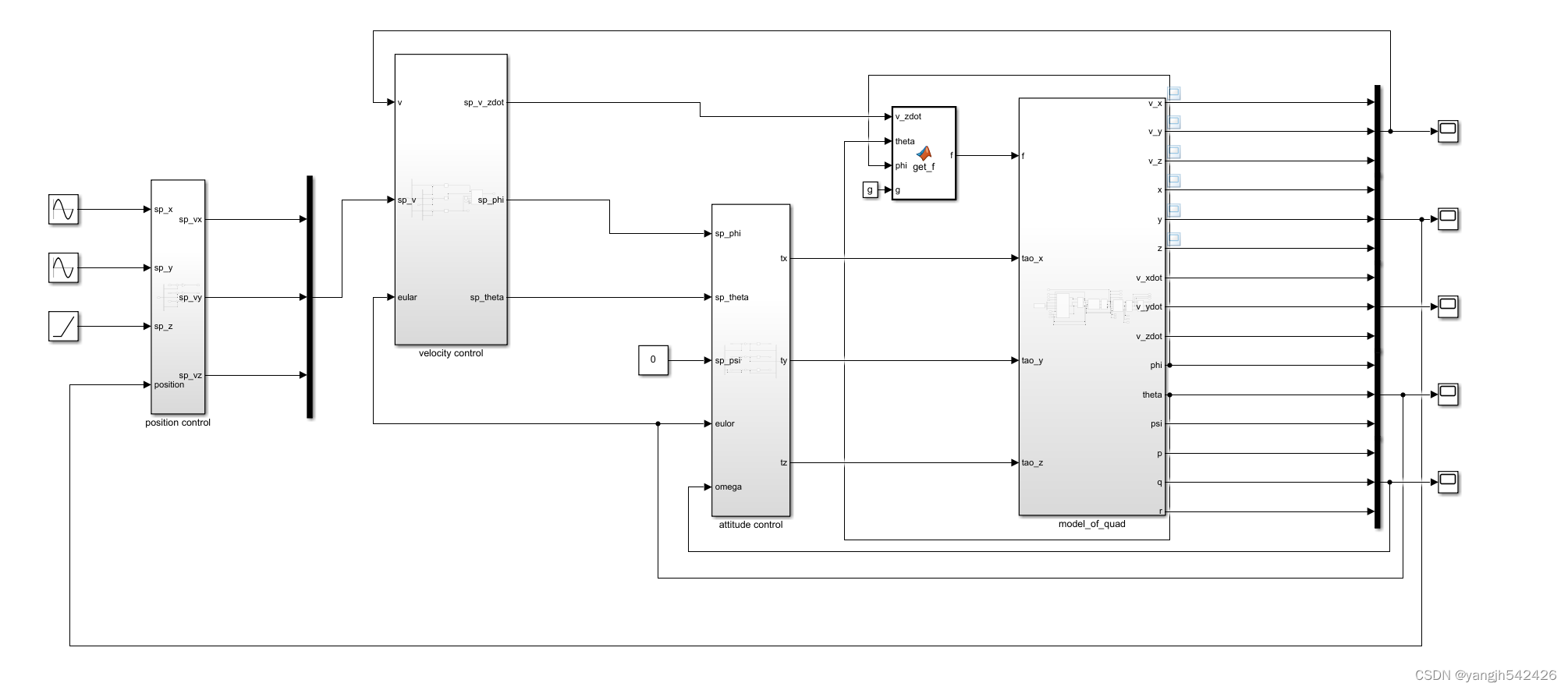
其中位置-速度为纯p控制,速度-加速度使用PID控制,加速度-姿态角需符合动力学方程。期望速度-期望姿态角的框架如
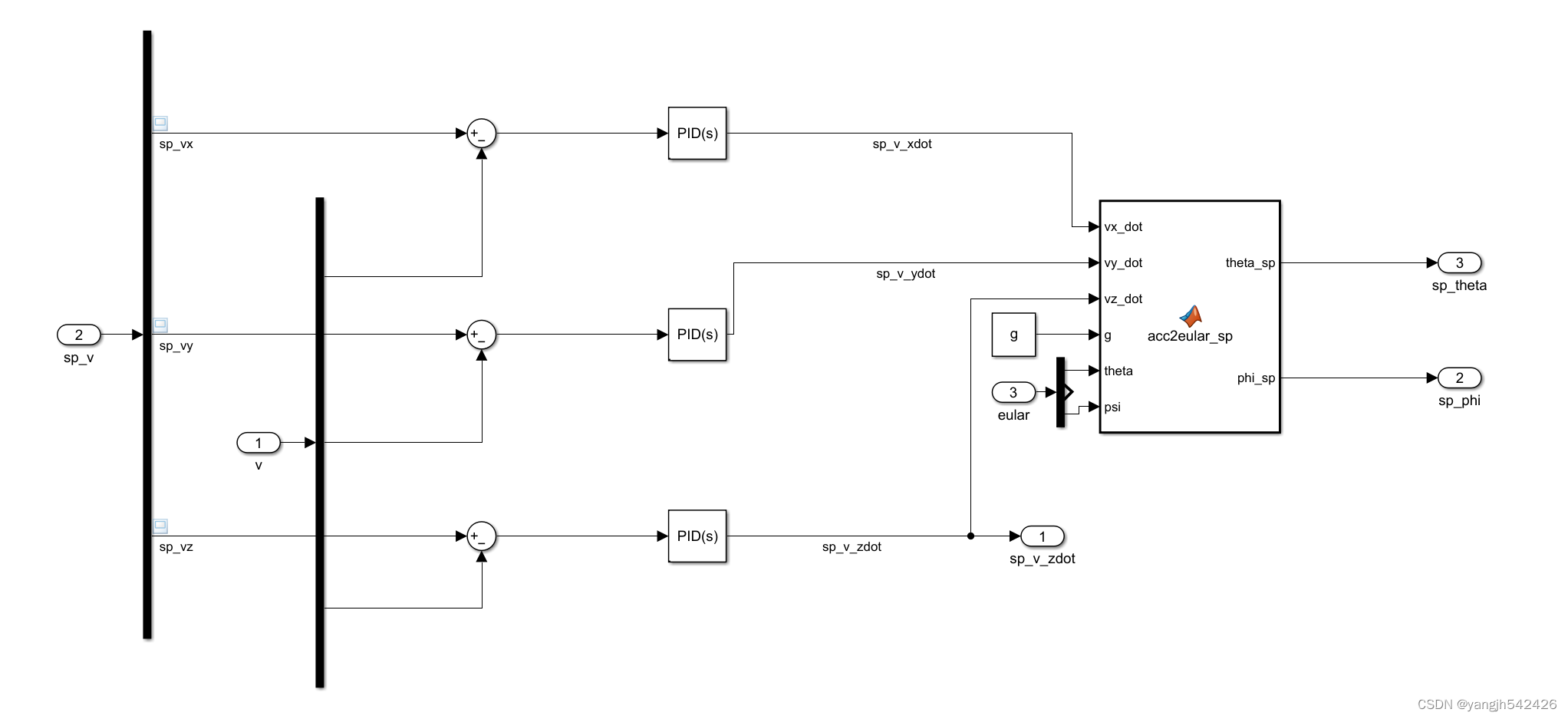
再由期望姿态角根据模型算得期望力矩,并将力矩作为控制量输入到无人机模型。由此完成无人机的位置控制。
初步得到无人机位置的闭环控制
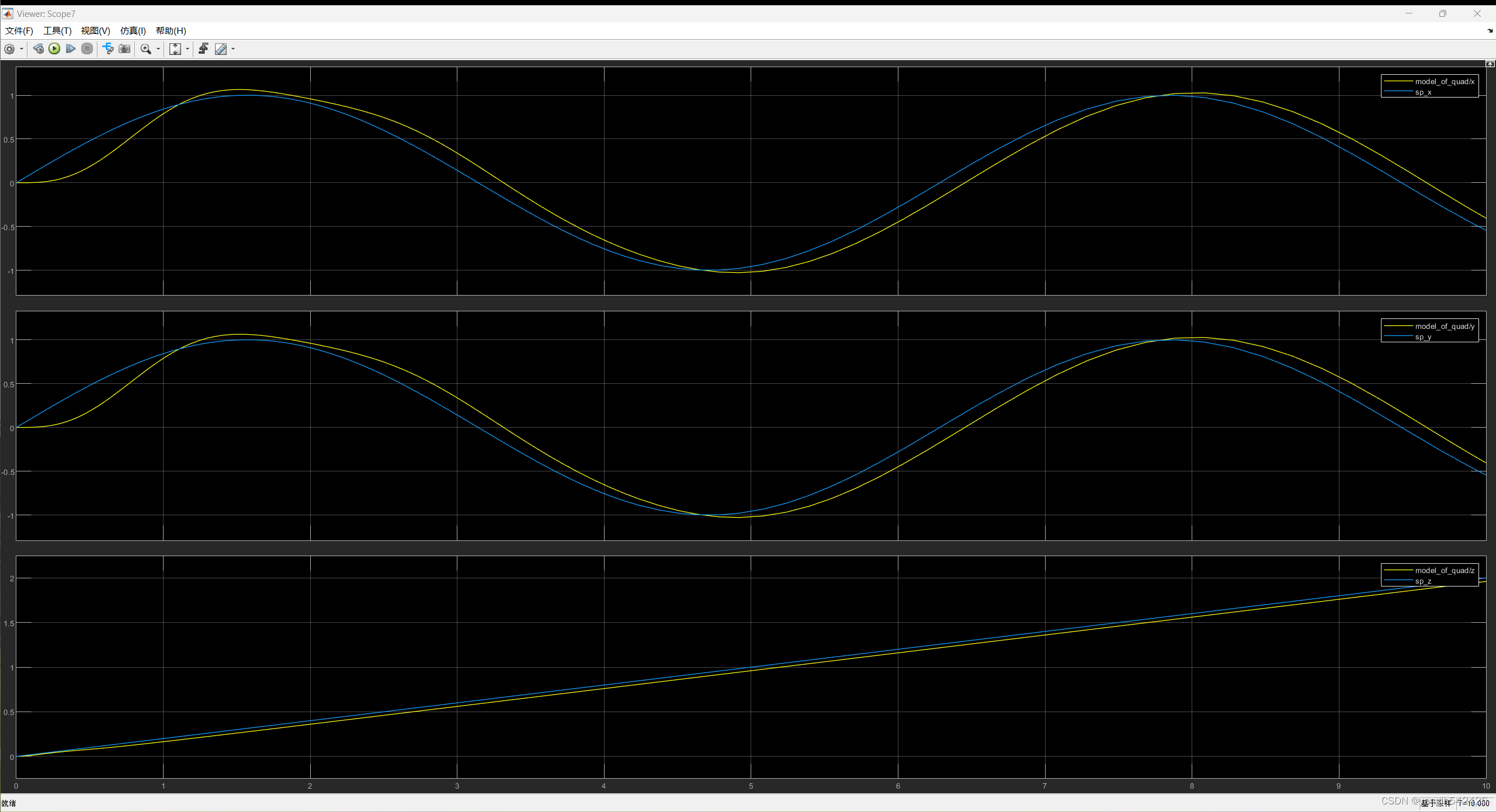
根据仿真结果对控制器参数进行调整。

