
- 1windows、mac、linux中node版本的切换(nvm管理工具),解决项目兼容问题 node版本管理、国内npm源镜像切换_切换node工具
- 2javascript正则表达式中/g /i /m的用法,以及实例
- 3大数据快速入门(05):MapReduce 编程模型赏析_大数据处理技术统计出每一个广告被点击次数。请结合mapreduce编程模型给出设计思
- 4基于SpringBoot+Vue的社区老人健康服务系统设计和实现(源码+lw+部署+讲解)
- 5CocosCreator2.2.x以及原生平台(Android&IOS)的热更方案的底层源码最彻底的分析,并开源更好的学习Demo
- 6DBeaver客户端连接Oracle数据库_dbeaver连接oracle
- 7第十一篇|基于SparkSQL的电影分析项目实战_基于spark的电影数据分析
- 8【免费题库】华为OD机试C卷 - 高效货运(Java 代码+解析)_1.老李是货运公司承运人,老李的货车额定载货重量为wt 2.现有两种货物,货物a单件重
- 9一次打通FlinkCDC同步Mysql数据_flink cdc mysql
- 10C++ 数据结构算法 学习笔记(3)-链表_链表c++
目标检测-RCNN系列_目标检测 合并候选框
赞
踩
• RCNN
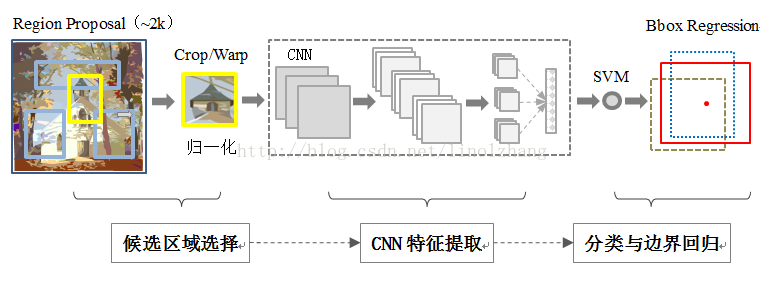
RCNN(Regions with CNN features)是将CNN方法应用到目标检测问题上的一个里程碑,由年轻有为的RBG大神提出,借助CNN良好的特征提取和分类性能,通过RegionProposal方法实现目标检测问题的转化。
算法可以分为四步:
1)候选区域选择
Region Proposal是一类传统的区域提取方法,可以看作不同宽高的滑动窗口,通过窗口滑动获得潜在的目标图像,关于Proposal大家可以看下SelectiveSearch,一般Candidate选项为2k个即可,这里不再详述;
根据Proposal提取的目标图像进行归一化,作为CNN的标准输入。
2)CNN特征提取
标准CNN过程,根据输入进行卷积/池化等操作,得到固定维度的输出;
3)分类与边界回归
实际包含两个子步骤,一是对上一步的输出向量进行分类(需要根据特征训练分类器);二是通过边界回归(bounding-box regression) 得到精确的目标区域,由于实际目标会产生多个子区域,旨在对完成分类的前景目标进行精确的定位与合并,避免多个检出。
RCNN存在三个明显的问题:
1)多个候选区域对应的图像需要预先提取,占用较大的磁盘空间;
2)针对传统CNN需要固定尺寸的输入图像,crop/warp(归一化)产生物体截断或拉伸,会导致输入CNN的信息丢失;
3)每一个ProposalRegion都需要进入CNN网络计算,上千个Region存在大量的范围重叠,重复的特征提取带来巨大的计算浪费。
• SPP-Net
智者善于提出疑问,既然CNN的特征提取过程如此耗时(大量的卷积计算),为什么要对每一个候选区域独立计算,而不是提取整体特征,仅在分类之前做一次Region截取呢?智者提出疑问后会立即付诸实践,于是SPP-Net诞生了。
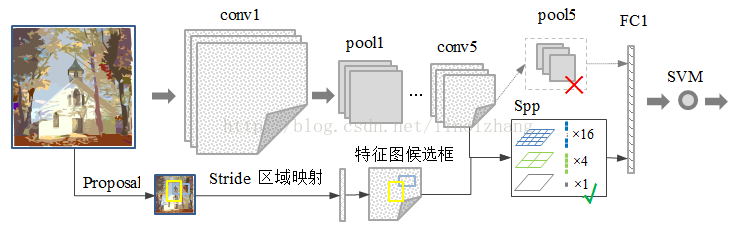
SPP-Net在RCNN的基础上做了实质性的改进:
1)取消了crop/warp图像归一化过程,解决图像变形导致的信息丢失以及存储问题;
2)采用空间金字塔池化(SpatialPyramid Pooling )替换了 全连接层之前的最后一个池化层(上图top),翠平说这是一个新词,我们先认识一下它。
为了适应不同分辨率的特征图,定义一种可伸缩的池化层,不管输入分辨率是多大,都可以划分成m*n个部分。这是SPP-net的第一个显著特征,它的输入是conv5特征图 以及特征图候选框(原图候选框 通过stride映射得到),输出是固定尺寸(m*n)特征;
还有金字塔呢?通过多尺度增加所提取特征的鲁棒性,这并不关键,在后面的Fast-RCNN改进中该特征已经被舍弃;
最关键的是SPP的位置,它放在所有的卷积层之后

