- 1ChatGPT写作提示词指令大全_gpt小红书指令
- 2鱼叉式钓鱼攻击_鱼叉攻击常用策略有
- 3Verilog刷题笔记48——FSM1型异步复位
- 4测试用例之场景法设计_根据注册流程,使用用例场景分析画出基本流与备选流,并设计出场景。(提示:通过对流
- 5csdn积分怎么获取_csdn积分获取
- 6[附源码]计算机毕业设计JAVA高校新生报到管理系统
- 72024年最全ElasticSearch数据迁移方法介绍_elasticsearch 数据迁移_elasticsearch 迁移
- 8Spark(42) -- SparkStreaming -- reduceByKeyAndWindow 函数详解_spark streaming reducebykeyandwindow计算top10
- 9植物大战僵尸2 服务器维护时间,植物大战僵尸2更新时间是什么时候 更新内容汇总...
- 10即兴演讲、怎么锻炼即兴演讲能力、一些即兴演讲的模板_观音按揭法案例
STM32CubeIDE(CUBE-MX hal库+库函数)----PWM呼吸灯实验_stm32cubeide pwm
赞
踩
系列文章目录
前言
一、PWM是什么?
PWM(Pulse Width Modulation) 脉冲宽度调制. 在具有惯性的系统中,可以通过对一系列脉冲的宽度进行调制,来等效地获得所需要的模拟参量,常应用于电机控速等领域. 以前在智能车比赛过程中使用过PWM功能,主要是用于控制小车的速度。这里用一个呼吸灯的例子介绍它的使用方法,通过不断调整LED灯的亮灭连续的情况下可以看到小灯像呼吸一样。
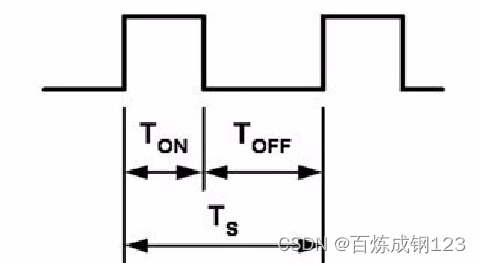
PWM参数: 占空比 = TON / TS,频率 = 1 / TS 分辨率 = 占空比变化步距
二、硬件架构
通用定时器(General Purpose Timer,如STM32中的TIM系列)通常具有多种工作模式,其中之一是输出比较模式。在输出比较模式中,定时器可以与一个或多个比较器(比较寄存器)进行比较,当计数器的值与比较器的值相等时,就可以执行相应的操作。
CCR寄存器的全称是 Capture/Compare Registe捕获比较寄存器。CCR 寄存器存储了比较器的比较值。当定时器的计数器达到或超过 CCR 寄存器中的值时,就会触发相应的操作。
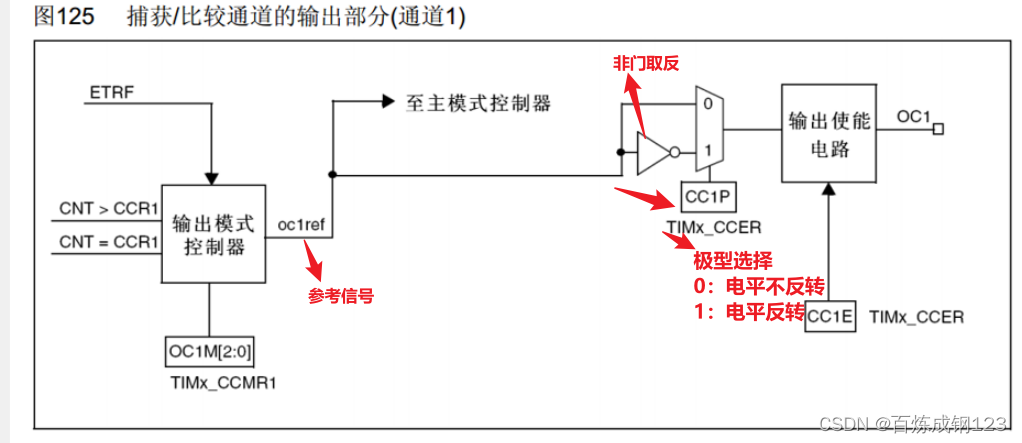
如上图所示,为捕获比较的输出部分。要注意两个寄存器的配置,第一个OC1M输出模型选择,第二个CCER极性选择。这两个决定了PWM输出什么样的波形,后面的实验也会有设置不同参数他们的波形参数会发生怎样的变化。下表是不同比较模式。

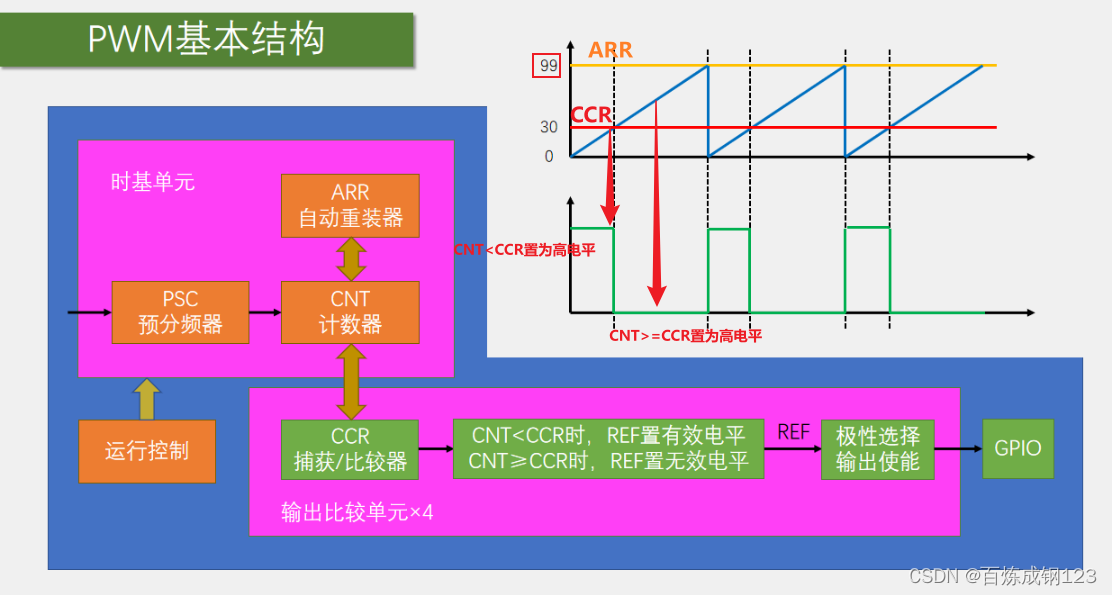
三、PWM实现原理
ARR:自动重装载寄存器的值, CCR:捕获/比较寄存器的值. 当CNT < CCR,IO输出1, 当CNT >= CCR,IO输出0.这个输出是由上面输出比较模式和极性共同确定的。我们通过不断改变CCR的值,就可以改变高低电平的时间,从而实现脉冲调制的功能。
如果想要输出频率为1KHZ,占空比为50%,分辨率为1%的PWM波形。
参数应该如何设置:Reso=1/(ARR+1)=0.1,可以得出ARR等于99。Duty=CCR/(ARR+1)=0.5,得到CCR等于50.带入第一个计算频率的公式可以得到PSC=719,PSC是预分频系数。

四、CUBEMX可视化配置
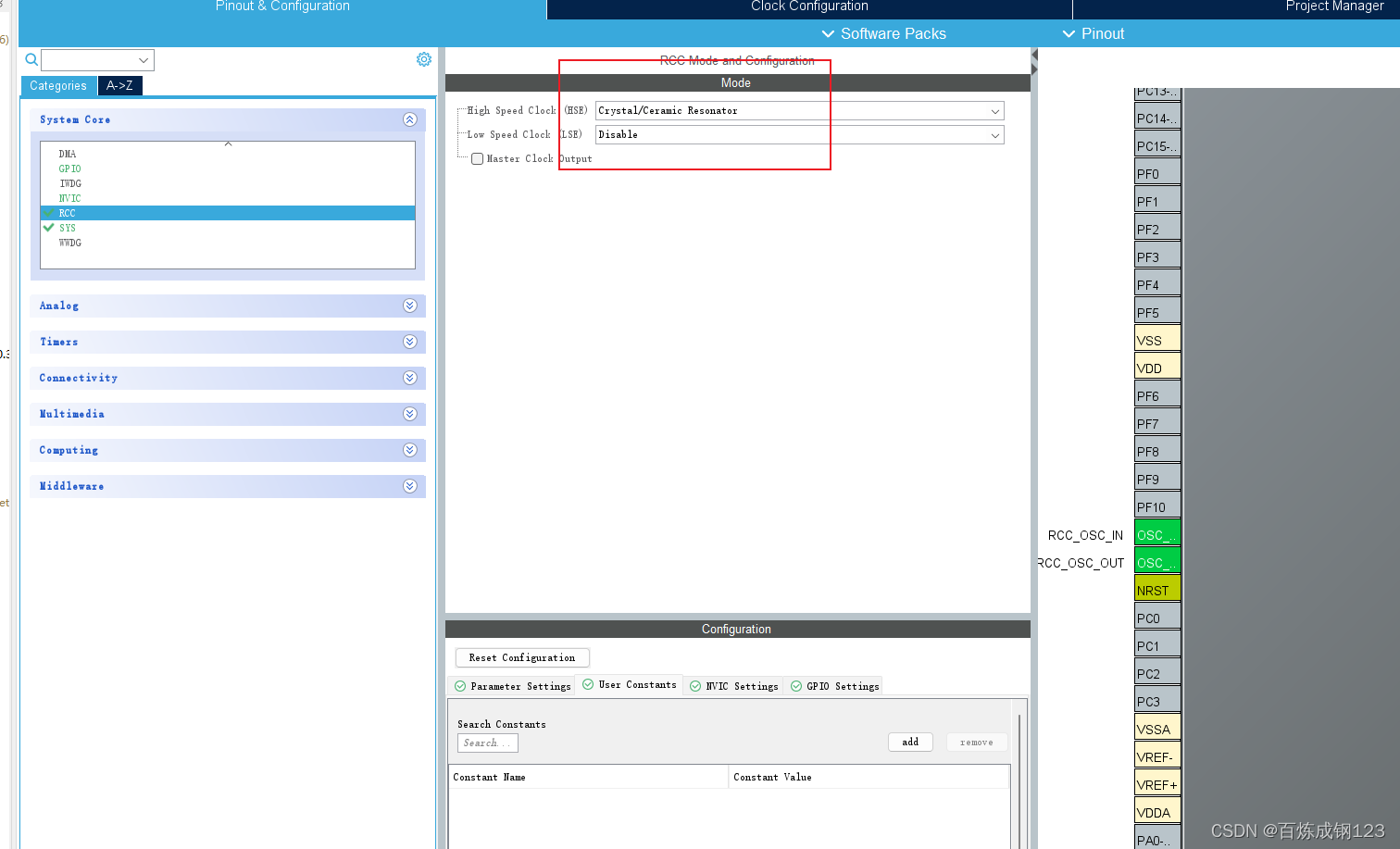
1、开启外部高速时钟
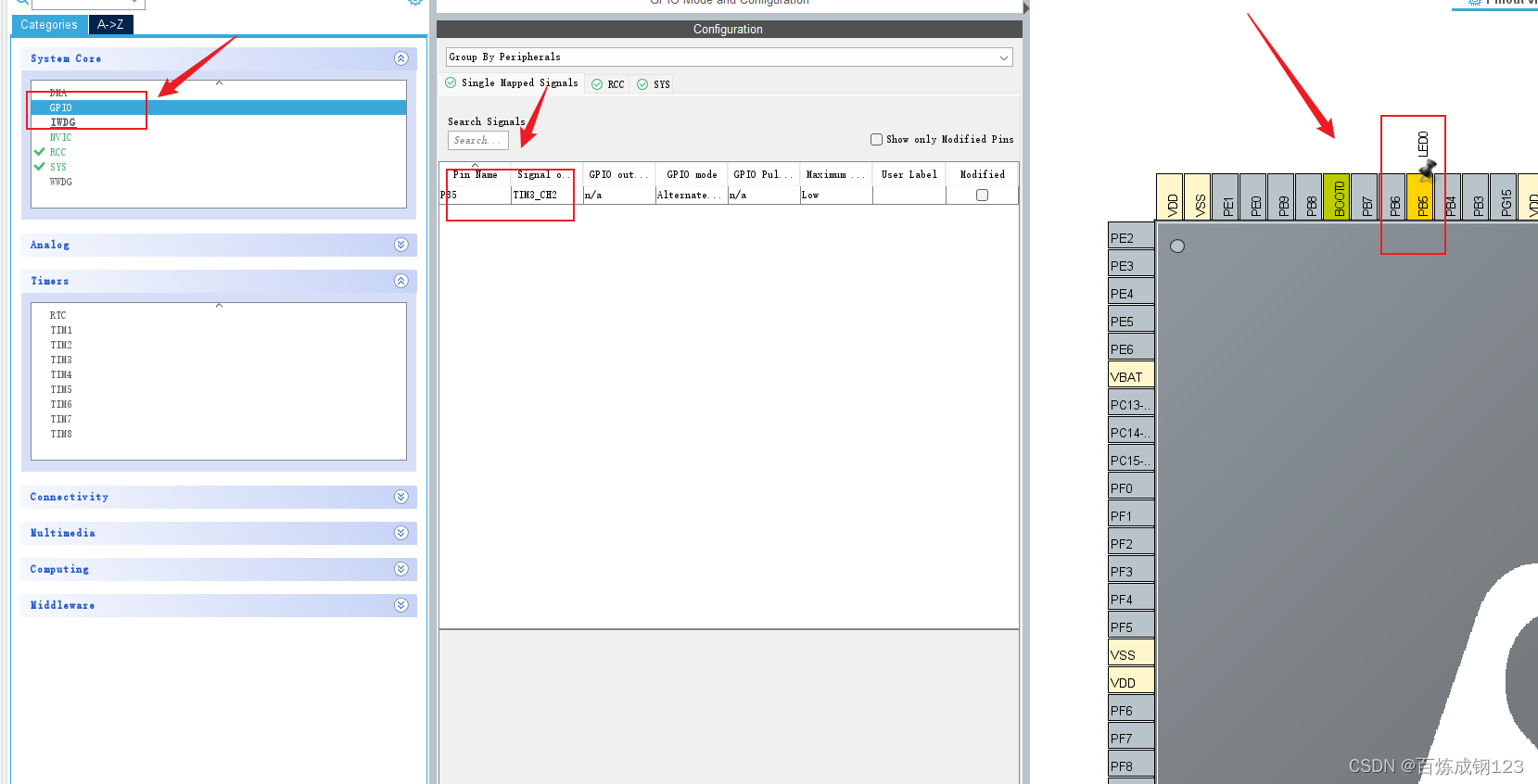
2、设置LED的GPIO口,要实现调光。控制LED的GPIO口必须要有定时器功能。我这里选择的是正点原子的STM32精英版。
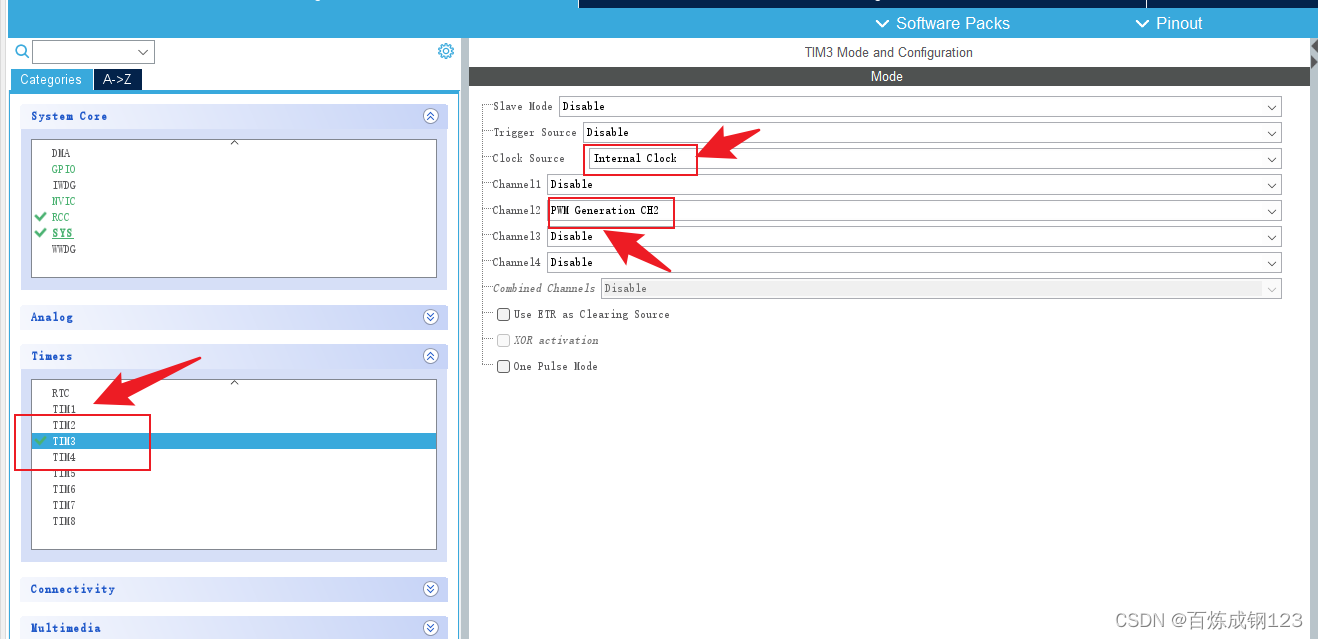
3、开启定时器
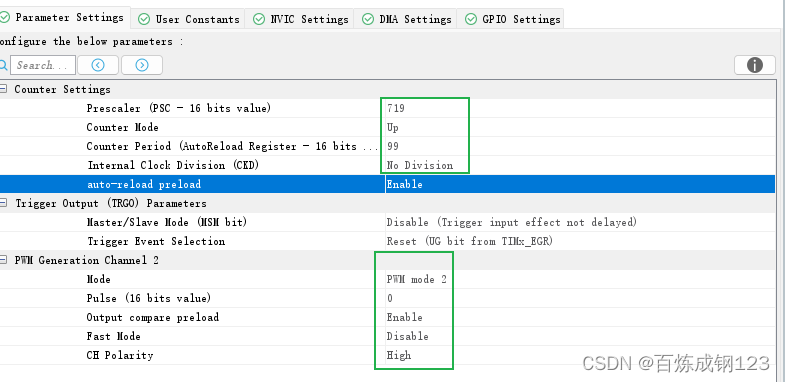
4、参数设置
输出频率为1KHZ,占空比为50%,分辨率为1%的PWM波形。计算方式如下:
参数应该如何设置:Reso=1/(ARR+1)=0.1,可以得出ARR等于99。Duty=CCR/(ARR+1)=0.5,得到CCR等于50.带入第一个计算频率的公式可以得到PSC=719,PSC是预分频系数。
5 常见的HAL库函数

6、HAL代码
HAL_TIM_PWM_Start(&htim3,TIM_CHANNEL_2);//开启定时器
- 1
在while(1)循环中不断利用改变__HAL_TIM_SET_COMPARE()修改CCR的值,这样就能不断改变高电平的时间。从而可以得到呼吸灯的效果。
while (1) { /* USER CODE END WHILE */ /* USER CODE BEGIN 3 */ for(i=0;i<=100;i++) { __HAL_TIM_SET_COMPARE(&htim3,TIM_CHANNEL_2,i); HAL_Delay(10); } for(i=0;i<=100;i++) { __HAL_TIM_SET_COMPARE(&htim3,TIM_CHANNEL_2,i); HAL_Delay(10); } }

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
tim.c文件CUBEMX自动生成的,主要用于设置各种参数。
/** ****************************************************************************** * @file tim.c * @brief This file provides code for the configuration * of the TIM instances. ****************************************************************************** * @attention * * <h2><center>© Copyright (c) 2024 STMicroelectronics. * All rights reserved.</center></h2> * * This software component is licensed by ST under BSD 3-Clause license, * the "License"; You may not use this file except in compliance with the * License. You may obtain a copy of the License at: * opensource.org/licenses/BSD-3-Clause * ****************************************************************************** */ /* Includes ------------------------------------------------------------------*/ #include "tim.h" /* USER CODE BEGIN 0 */ /* USER CODE END 0 */ TIM_HandleTypeDef htim3; /* TIM3 init function */ void MX_TIM3_Init(void) { TIM_ClockConfigTypeDef sClockSourceConfig = {0}; TIM_MasterConfigTypeDef sMasterConfig = {0}; TIM_OC_InitTypeDef sConfigOC = {0}; htim3.Instance = TIM3; htim3.Init.Prescaler = 719; htim3.Init.CounterMode = TIM_COUNTERMODE_UP; htim3.Init.Period = 99; htim3.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1; htim3.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_ENABLE; if (HAL_TIM_Base_Init(&htim3) != HAL_OK) { Error_Handler(); } sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL; if (HAL_TIM_ConfigClockSource(&htim3, &sClockSourceConfig) != HAL_OK) { Error_Handler(); } if (HAL_TIM_PWM_Init(&htim3) != HAL_OK) { Error_Handler(); } sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET; sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE; if (HAL_TIMEx_MasterConfigSynchronization(&htim3, &sMasterConfig) != HAL_OK) { Error_Handler(); } sConfigOC.OCMode = TIM_OCMODE_PWM2; sConfigOC.Pulse = 0; sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH; sConfigOC.OCFastMode = TIM_OCFAST_DISABLE; if (HAL_TIM_PWM_ConfigChannel(&htim3, &sConfigOC, TIM_CHANNEL_2) != HAL_OK) { Error_Handler(); } HAL_TIM_MspPostInit(&htim3); } void HAL_TIM_Base_MspInit(TIM_HandleTypeDef* tim_baseHandle) { if(tim_baseHandle->Instance==TIM3) { /* USER CODE BEGIN TIM3_MspInit 0 */ /* USER CODE END TIM3_MspInit 0 */ /* TIM3 clock enable */ __HAL_RCC_TIM3_CLK_ENABLE(); /* USER CODE BEGIN TIM3_MspInit 1 */ /* USER CODE END TIM3_MspInit 1 */ } } void HAL_TIM_MspPostInit(TIM_HandleTypeDef* timHandle) { GPIO_InitTypeDef GPIO_InitStruct = {0}; if(timHandle->Instance==TIM3) { /* USER CODE BEGIN TIM3_MspPostInit 0 */ /* USER CODE END TIM3_MspPostInit 0 */ __HAL_RCC_GPIOB_CLK_ENABLE(); /**TIM3 GPIO Configuration PB5 ------> TIM3_CH2 */ GPIO_InitStruct.Pin = LED0_Pin; GPIO_InitStruct.Mode = GPIO_MODE_AF_PP; GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW; HAL_GPIO_Init(LED0_GPIO_Port, &GPIO_InitStruct); __HAL_AFIO_REMAP_TIM3_PARTIAL(); /* USER CODE BEGIN TIM3_MspPostInit 1 */ /* USER CODE END TIM3_MspPostInit 1 */ } } void HAL_TIM_Base_MspDeInit(TIM_HandleTypeDef* tim_baseHandle) { if(tim_baseHandle->Instance==TIM3) { /* USER CODE BEGIN TIM3_MspDeInit 0 */ /* USER CODE END TIM3_MspDeInit 0 */ /* Peripheral clock disable */ __HAL_RCC_TIM3_CLK_DISABLE(); /* USER CODE BEGIN TIM3_MspDeInit 1 */ /* USER CODE END TIM3_MspDeInit 1 */ } } /* USER CODE BEGIN 1 */ /* USER CODE END 1 */ /************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
/* USER CODE BEGIN Header */ /** ****************************************************************************** * @file : main.c * @brief : Main program body ****************************************************************************** * @attention * * <h2><center>© Copyright (c) 2024 STMicroelectronics. * All rights reserved.</center></h2> * * This software component is licensed by ST under BSD 3-Clause license, * the "License"; You may not use this file except in compliance with the * License. You may obtain a copy of the License at: * opensource.org/licenses/BSD-3-Clause * ****************************************************************************** */ /* USER CODE END Header */ /* Includes ------------------------------------------------------------------*/ #include "main.h" #include "tim.h" #include "gpio.h" /* Private includes ----------------------------------------------------------*/ /* USER CODE BEGIN Includes */ /* USER CODE END Includes */ /* Private typedef -----------------------------------------------------------*/ /* USER CODE BEGIN PTD */ uint8_t i; /* Private function prototypes -----------------------------------------------*/ void SystemClock_Config(void); /** * @brief The application entry point. * @retval int */ int main(void) { /* Reset of all peripherals, Initializes the Flash interface and the Systick. */ HAL_Init(); /* USER CODE BEGIN Init */ /* USER CODE END Init */ /* Configure the system clock */ SystemClock_Config(); /* USER CODE BEGIN SysInit */ /* USER CODE END SysInit */ /* Initialize all configured peripherals */ MX_GPIO_Init(); MX_TIM3_Init(); /* USER CODE BEGIN 2 */ HAL_TIM_PWM_Start(&htim3,TIM_CHANNEL_2); /* USER CODE END 2 */ /* Infinite loop */ /* USER CODE BEGIN WHILE */ while (1) { /* USER CODE END WHILE */ /* USER CODE BEGIN 3 */ for(i=0;i<=100;i++) { __HAL_TIM_SET_COMPARE(&htim3,TIM_CHANNEL_2,i); HAL_Delay(10); } for(i=0;i<=100;i++) { __HAL_TIM_SET_COMPARE(&htim3,TIM_CHANNEL_2,i); HAL_Delay(10); } } /* USER CODE END 3 */ } /** * @brief System Clock Configuration * @retval None */ void SystemClock_Config(void) { RCC_OscInitTypeDef RCC_OscInitStruct = {0}; RCC_ClkInitTypeDef RCC_ClkInitStruct = {0}; /** Initializes the RCC Oscillators according to the specified parameters * in the RCC_OscInitTypeDef structure. */ RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE; RCC_OscInitStruct.HSEState = RCC_HSE_ON; RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1; RCC_OscInitStruct.HSIState = RCC_HSI_ON; RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON; RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE; RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9; if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK) { Error_Handler(); } /** Initializes the CPU, AHB and APB buses clocks */ RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK |RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2; RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK; RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1; RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2; RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1; if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK) { Error_Handler(); } } /* USER CODE BEGIN 4 */ /* USER CODE END 4 */ /** * @brief This function is executed in case of error occurrence. * @retval None */ void Error_Handler(void) { /* USER CODE BEGIN Error_Handler_Debug */ /* User can add his own implementation to report the HAL error return state */ __disable_irq(); while (1) { } /* USER CODE END Error_Handler_Debug */ } #ifdef USE_FULL_ASSERT /** * @brief Reports the name of the source file and the source line number * where the assert_param error has occurred. * @param file: pointer to the source file name * @param line: assert_param error line source number * @retval None */ void assert_failed(uint8_t *file, uint32_t line) { /* USER CODE BEGIN 6 */ /* User can add his own implementation to report the file name and line number, ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */ /* USER CODE END 6 */ } #endif /* USE_FULL_ASSERT */ /************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
五、库函数版本代码
配置步骤如下:
需要注意的点:
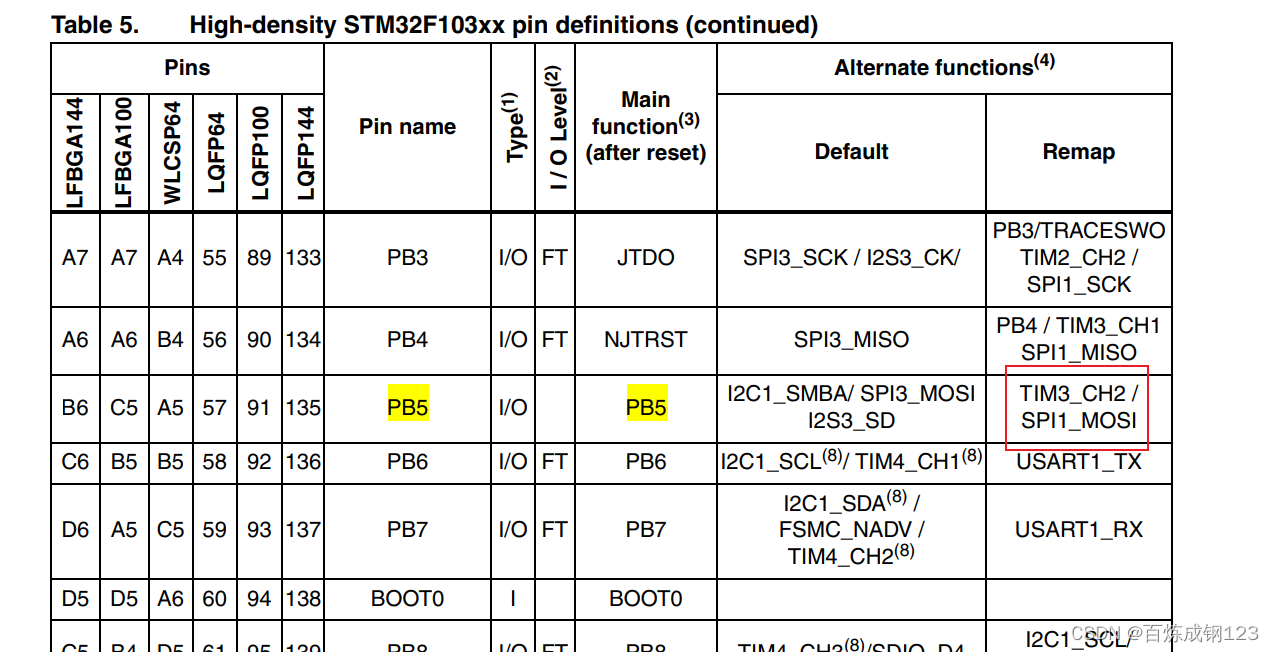
1、端口的重映射:如下图所示,这是STM32F103系列的引脚定义(从中文参考手册中获得),默认功能中并没有定时器功能。而Remap功能中有TIM3_CH2功能因此需要进行重映射。
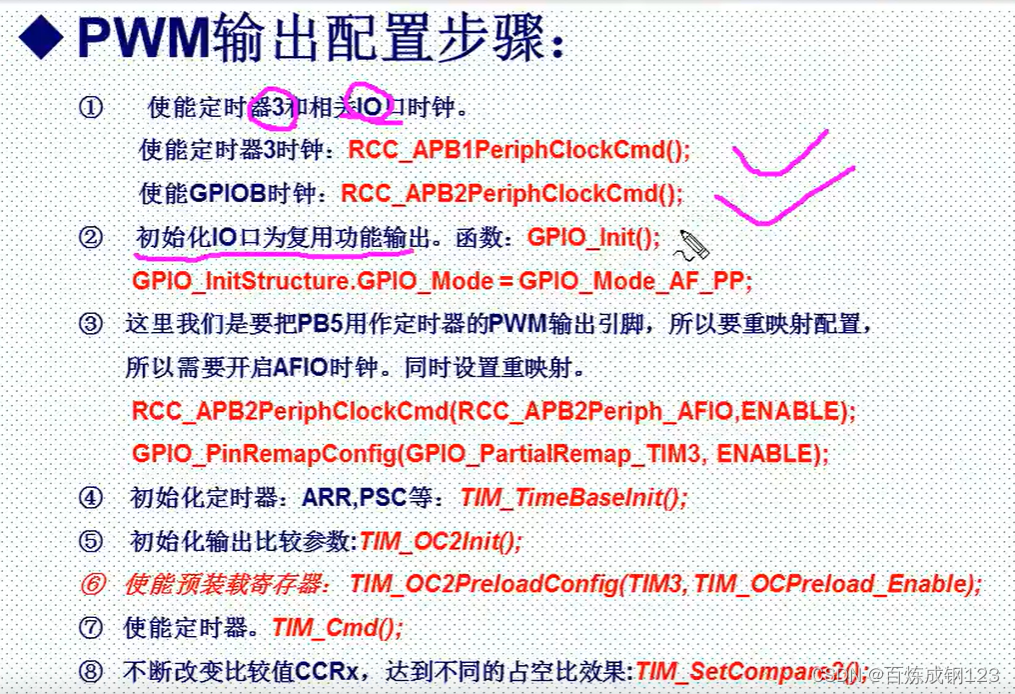
在初始化GPIO口时,需要注意以下几点。1、使能AFIO复用功能。2、GPIO_PinRemapConfig 3、GPIO_Mode设置为GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
//使能定时器3时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //使能定时器3
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO, ENABLE); //使能GPIO外设和AFIO复用功能模块时钟
GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3, ENABLE); //Timer3部分重映射 TIM3_CH2->PB5
//设置该引脚为复用输出功能,输出TIM3 CH2的PWM脉冲波形 GPIOB.5
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; //TIM_CH2
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);//初始化GPIO
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
2、TIM_OC2Init() 、TIM_OC2PreloadConfig() 、TIM_SetCompare2()函数的使用
如果你使用的是定时器的通道1,这些函数都要进行对应的改变TIM_OC1Init() 、TIM_OC1PreloadConfig() 、TIM_SetCompare1()
六、实验部分
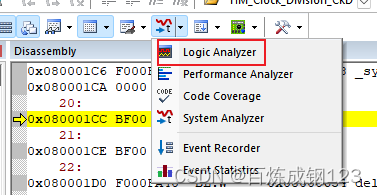
仿真
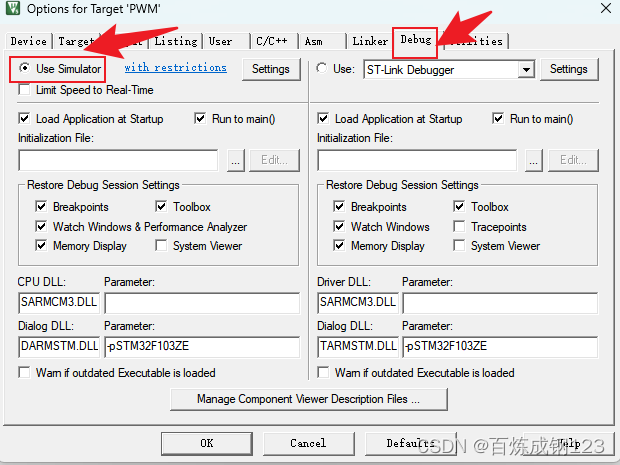
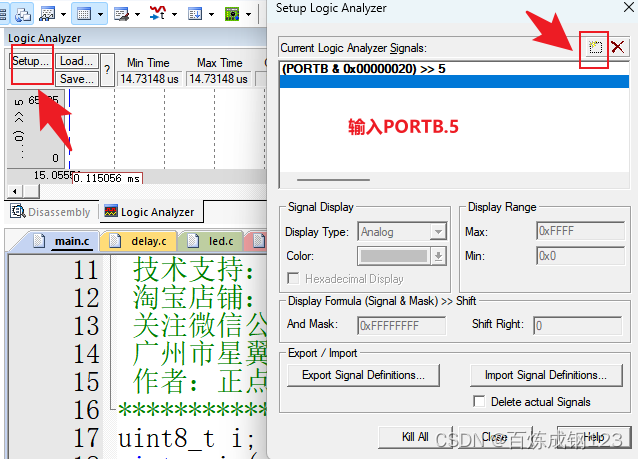
如果没有示波器,我们又想要看PWM波形。我们可以利用Keil自带的仿真进行实验,配置步骤如下。

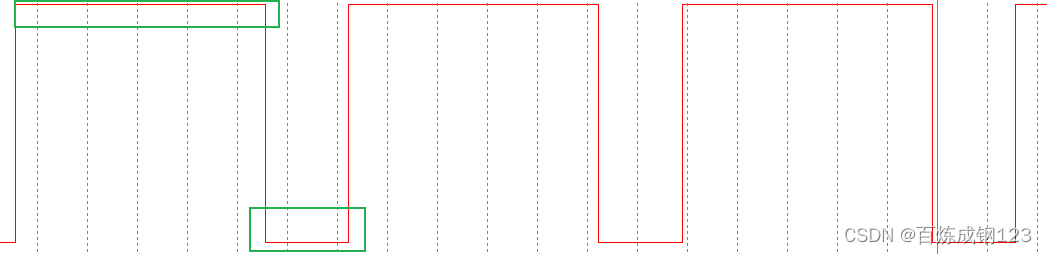
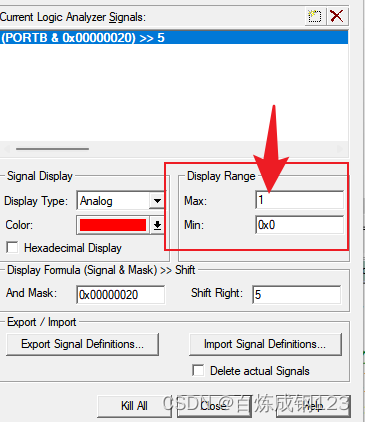
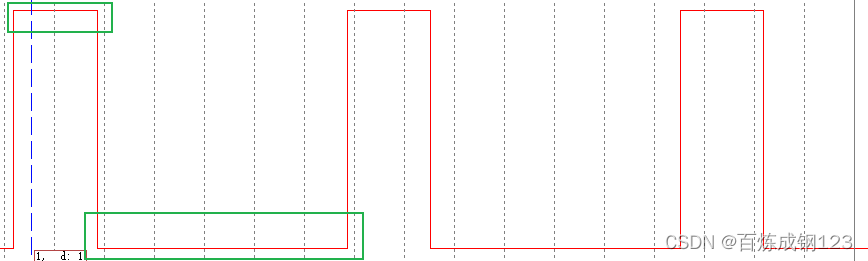
注意这里需要设置显示范围,刚开始是0-0xFFFF。需要改成0-1,否则看不到波形
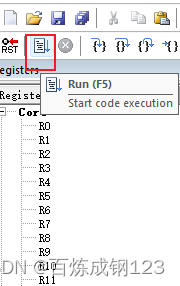
进行全速运行
点击停止,再查看波形。如果不停止,波形一直在变化无法看到现象。
PWM_SetCompare(50); 此时设置的占空比为50,因为ARR的值为100。根据波形图可以看出,高低电平各占一半。
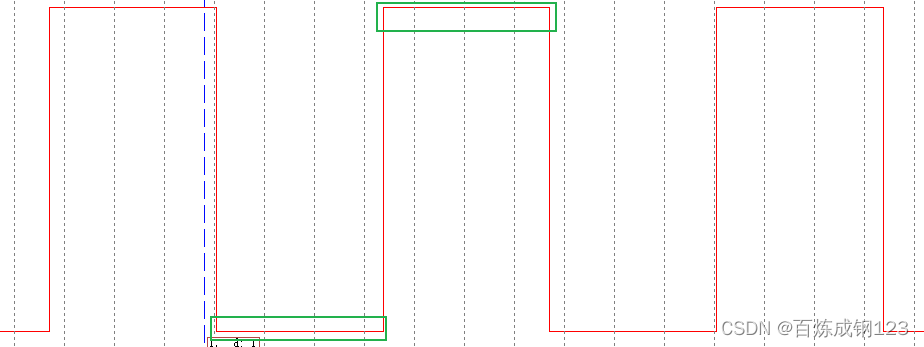
下面是验证TIM_OCMode和极性选择
TIM_OCInitStructure.TIM_OCMode=TIM_OCMode_PWM2;
TIM_OCInitStructure.TIM_OCPolarity=TIM_OCPolarity_High;
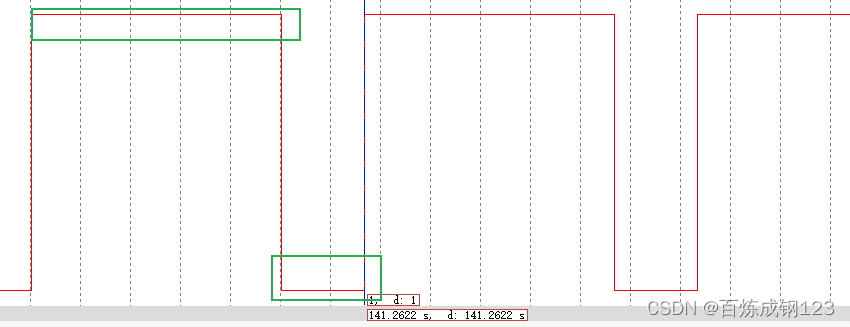
TIM_OCInitStructure.TIM_OCMode=TIM_OCMode_PWM2;
TIM_OCInitStructure.TIM_OCPolarity=TIM_OCPolarity_Low;
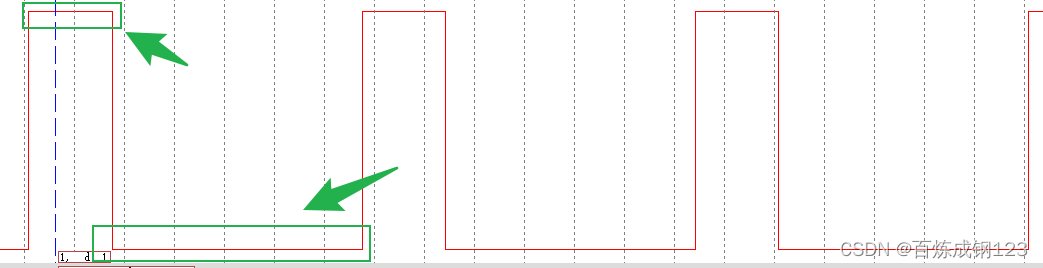
TIM_OCInitStructure.TIM_OCMode=TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OCPolarity=TIM_OCPolarity_High;
TIM_OCInitStructure.TIM_OCMode=TIM_OCMode_PWM1;//PWM模式1
TIM_OCInitStructure.TIM_OCPolarity=TIM_OCPolarity_Low;