
热门标签
热门文章
- 1uniapp 怎么设置凸起的底部tabbar_uniapp底部导航栏中间凸起
- 2第二周周报_入职培训第二周周报
- 3vue3 element-plus el-table:列表中相同名称的数据实现行合并_element-ui el-table span-method合并name相同的行
- 4【PyTorch][chapter 16][李宏毅深度学习][Neighbor Embedding][t-SNE]
- 5H264 码率控制原理
- 6Nightingale发布v5.9.2,新功能解决多个生产痛点,真香_夜莺监控( nightingale ) 新建监控大盘
- 7SQL Server 跨服务器同步或定时同步数据库
- 8es (brain split)脑裂问题导致重建索引速度缓慢_fatal error in thread
- 9汉诺塔问题—java详解(附源码)
- 10为什么 Linux 系统默认页大小是 4KB ?_linux为什么一页是4k
当前位置: article > 正文
Ardupilot EKF3核心算法《加速度如何修正姿态更新》_为什么加速度可以修正姿态
作者:羊村懒王 | 2024-02-20 03:52:43
赞
踩
为什么加速度可以修正姿态
目录
摘要
本节重点讲解Ardupilot EKF3核心算法《加速度如何修正姿态更新》,欢迎批评指正!!!
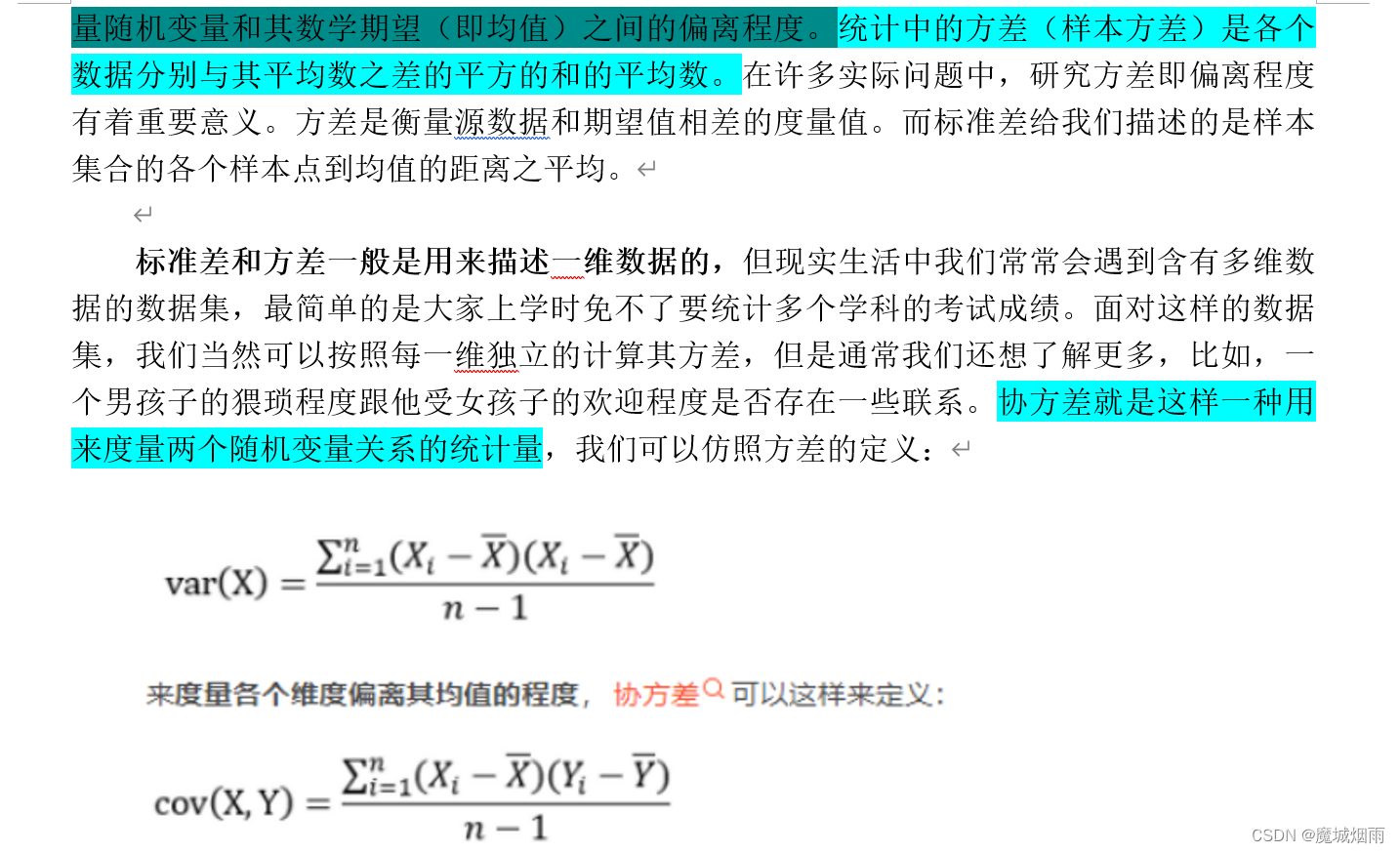
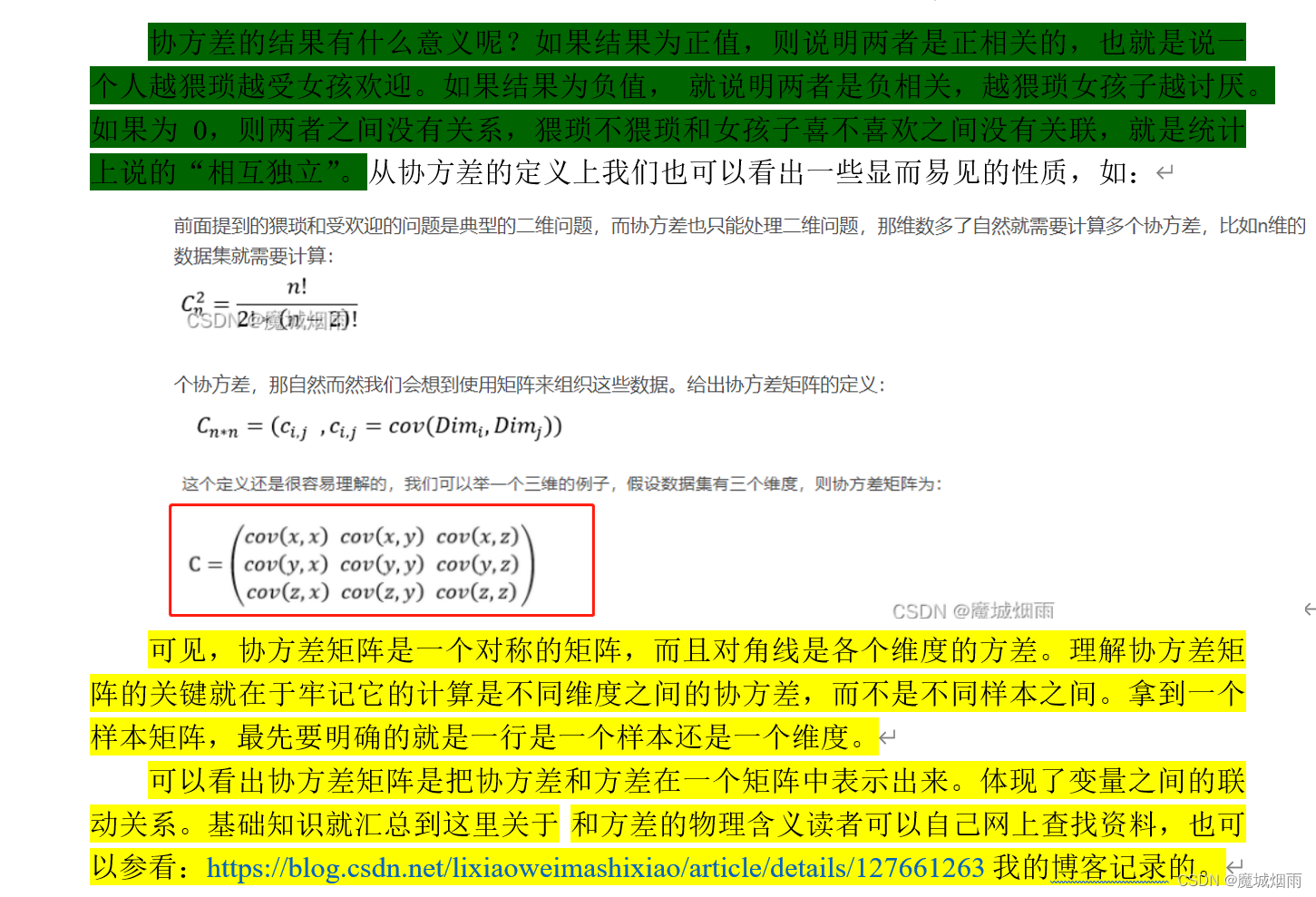
1.加速度如何修正姿态
我们将会通过垂直方向位置如何影响四元数的更新间接联系,间接阐明加速度如何修正姿态更新的。
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/羊村懒王/article/detail/118269
推荐阅读
相关标签

