
- 1吸星大法:像科学家一样思考_吸星学习法
- 2毕业/课程设计——基于STM32的智能灯光控制系统(物联网、智能家居、手机APP控制、语音控制)_基于语音控制的led照明系统的研发
- 3AOP 在android中的使用之埋点日志_android日志埋点
- 4校园小情书微信小程序源码 | 社区小程序前后端开源 | 校园表白墙交友小程序
- 5字节跳动发布最新AI视频模型Magic Animate(附教程)
- 6记录 Dubbo+Zookeeper 学习Demo_dubbo+zk 官网demo
- 7“pycharm打印结果被折叠,显示不完全”的解决方案_pycharm输出完整结果
- 8【wails】(6):使用wails做桌面应用开发,使用gin+go-chatglm.cpp进行本地模型运行,在windows上运行成功
- 9Android通过Web与后台数据库交互_安卓app与web数据交互
- 10Android Studio 实验四_android studio实验报告
【无人机】基于运动编码粒子群优化(MPSO)的搜索无人机(UAV)的运动目标(Matlab代码实现)_运动编码粒子群mpso优化算法
赞
踩
目录
1 概述
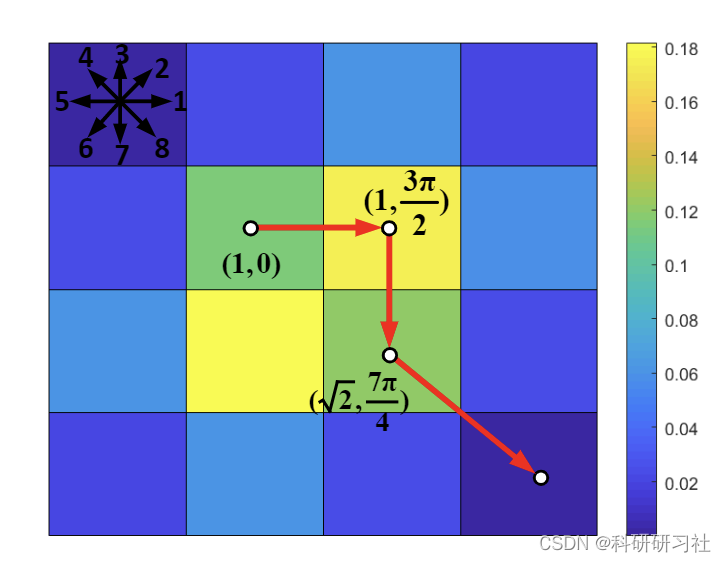
本文为运动编码粒子群优化(MPSO)的新型算法,用于寻找无人机(UAV)的运动目标。从贝叶斯理论来看,搜索问题可以转换为表示检测到目标概率的成本函数的优化。在这里,开发的MPSO通过将搜索轨迹编码为PSO算法中粒子生成过程中演变的一系列无人机运动路径来解决这个问题。这种运动编码方法允许保留群体的重要属性,包括认知和社会一致性,从而产生更好的解决方案。与原始PSO相比,现有方法的大量仿真结果表明,与原始PSO相比,所提出的MPSO的检测性能和时间性能提高了4.71倍,并且在大多数搜索场景中也优于其他最先进的元启发优化算法,包括人工蜂群(ABC),蚁群优化(ACO),遗传算法(GA),差分进化(DE)和树种算法(TSA)。已经对真实无人机进行了实验,在不同场景中寻找动态目标,以证明MPSO在实际应用中的优点。
本文的其余部分结构如下:第 2 节概述了制定目标函数的步骤。第 3 节介绍了提出的 MPSO 及其解决复杂搜索问题的实现。第 4 节提供了算例和实验结果。在第 5 节中得出结论。
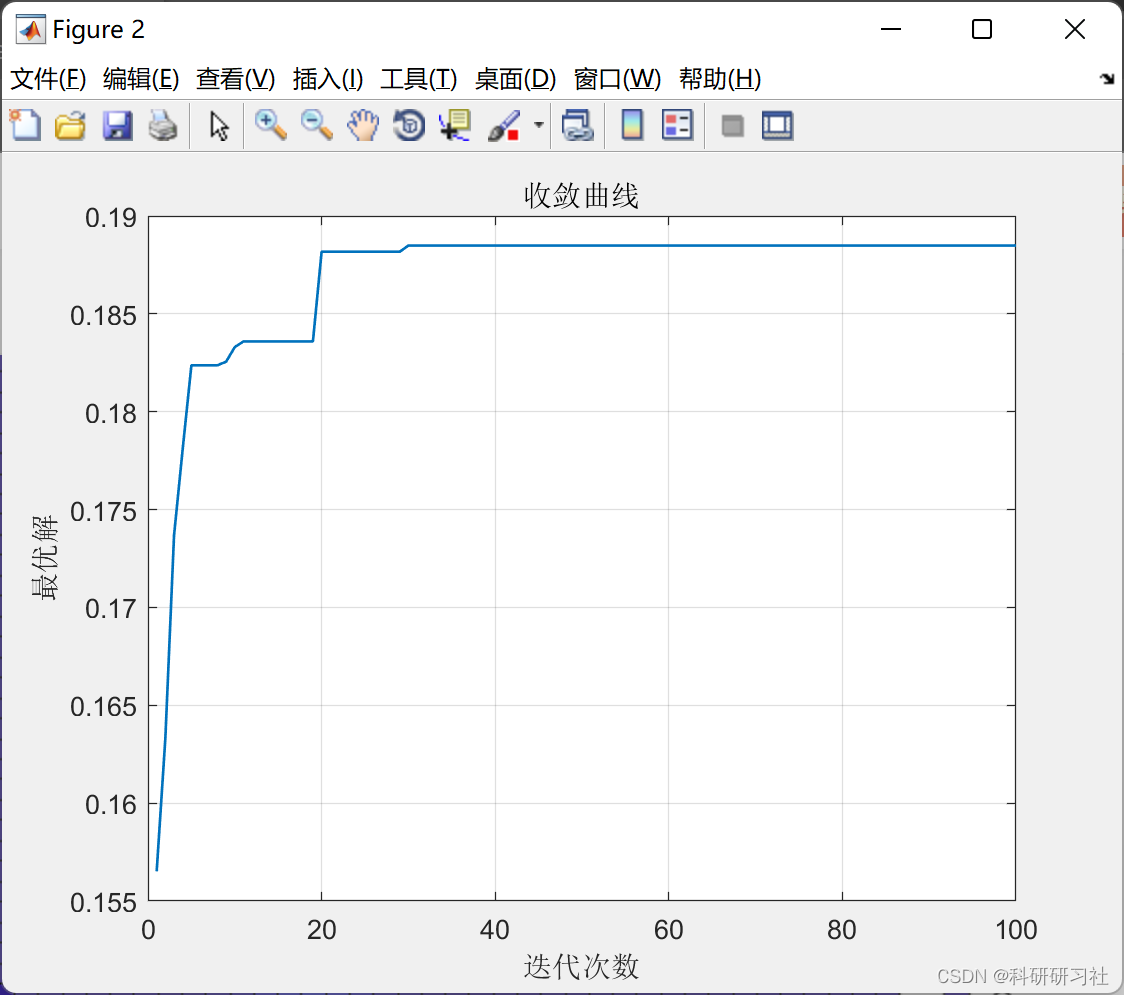
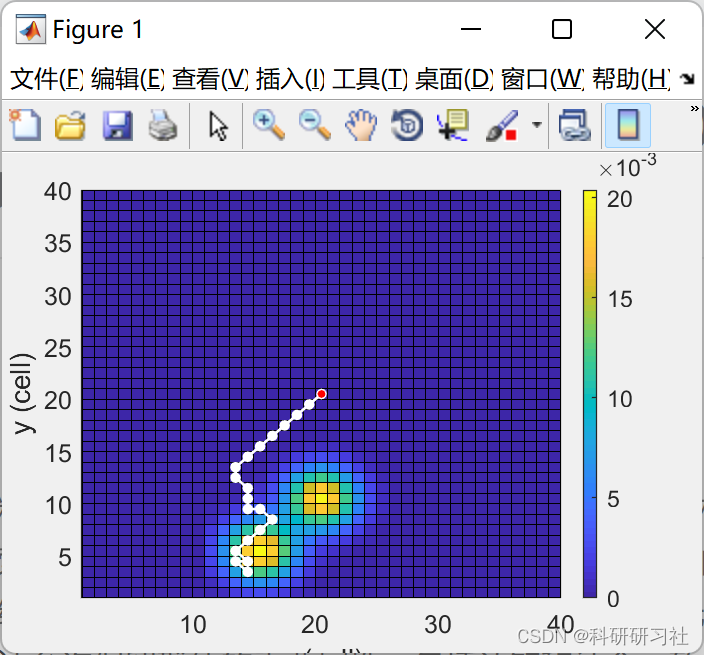
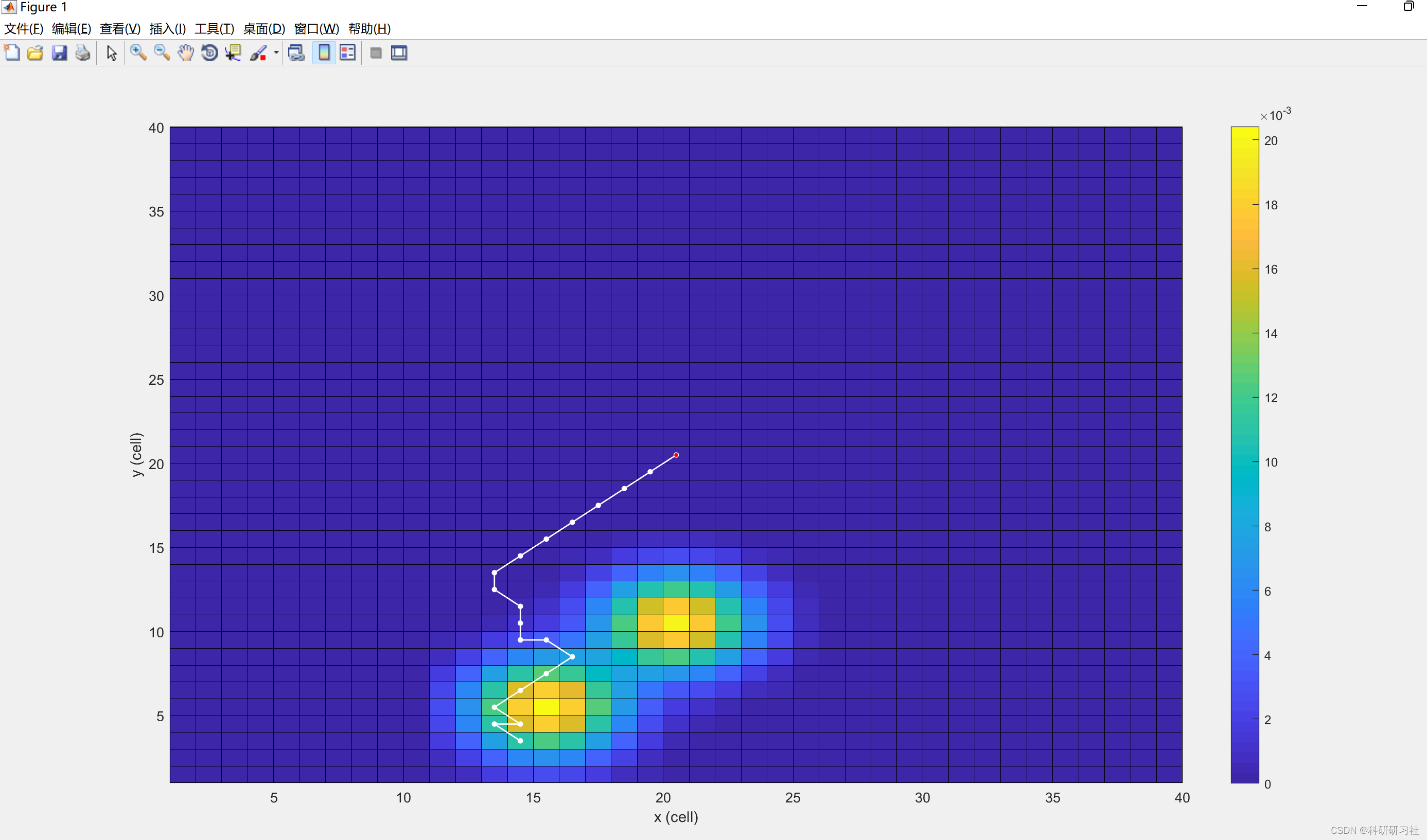
2 运行结果
 部分代码:
部分代码:
-
-
- function PlotSolution(tour,model)
-
- MAP_SIZE = model.MAPSIZE;
- N = model.n; % Path length
- x = 1:1:MAP_SIZE; y = 1:1:MAP_SIZE; % x & y from 0 to 20
- [X,Y] = meshgrid(x,y); % Replicate x & y to create a rectangular grid (X,Y)
- clf('reset');
- h = pcolor(X,Y,model.Pmap);
- hold on;
-
- tourX = tour(:,1) + model.xmax + 0.5;
- tourY = tour(:,2) + model.ymax + 0.5;
-
- plot(tourX,tourY,'w-o',...
- 'MarkerSize',3,...
- 'MarkerFaceColor','w',...
- 'LineWidth',1);
-
- plot(tourX(1),tourY(1),'r-o',...
- 'MarkerSize',2,...
- 'MarkerFaceColor','r',...
- 'LineWidth',1);
-
- xlabel('x (cell)');
- ylabel('y (cell)');
-
- % Set properties
- set(h,'linewidth',0.1);
- cb = colorbar;
- cb.Ruler.Exponent = -3;
- gcaP=get(gca,'position');
- cbP=get(cb,'Position');
- cbP(3)=cbP(3)/2; % change the colorbar width
- set(cb,'Position',cbP)
- set(gca,'position',gcaP)
- set(gcf,'position',[300,100,350,250]); % Set the map size
-
- end
3 结论
通过上述广泛的模拟、全面的比较和实验,可以看出 MPSO 在大多数搜索场景中表现出比其他最先进的启发式算法更好的性能,并且适用于实际的无人机搜索操作。 MPSO 成功的原因在于运动编码机制,它可以防止算法在搜索过程中生成无效路径,从而避免重新初始化的需要,从而加速收敛.运动编码机制还允许 MPSO 在运动空间而不是笛卡尔空间中进行搜索,以提高搜索性能并更好地适应目标动态。这一优势清楚地体现在 MPSO 对具有挑战性的场景 4 的良好搜索结果中,其中目标在与需要无人机掉头的搜索路径相反的方向移动。然而,与 PSO 一样,如果搜索维度增加 [37],MPSO 可能需要增加群体大小和迭代次数。在这些场景中,需要并行实现来有效地减少计算时间,从而提高所提出算法在大规模系统中的可扩展性。在实际搜索中,目标动态可能会因应用而异,因此本研究中使用的确定性假设可能会超出其有效性。在这些情况下,可以采用使用诸如卡尔曼滤波器 [38] 之类的最佳估计器的预测机制来提供目标轨迹的预测。然后用于计算 MPSO 目标函数中使用的累积概率。
4 参考文献
部分理论引用网络文献,如有侵权请联系删除。
[1]俞汉清,林艳,贾林琼,李强,张一晋.面向多目标救援的通信受限无人机集群分布式策略[J].物联网学报,2022,6(03):103-112.

