
- 1AIGC 专栏简介_claude免费镜像
- 2Java连接并操作SQLServer数据库_java 连接sqlserver数据库,并执行sql语句
- 3GPT-SoVITS项目的API改良与使用_gpt-sovits api
- 4开发Android Launcher的技术难点
- 5数据库工具连接Mysql报Password authentication failed错误
- 6SDL 入门指南:了解 SDL,快速上手 SDL 的安装和配置——VS2022
- 7STM32—蜂鸣器_stm32 蜂鸣器
- 8go mod tidy报错:zip: not a valid zip file
- 924 LLM错误代码补全:机器学习顶会NeurIPS‘23 智能体评估:自行构建数据集Buggy-HumanEval、Buggy-FixEval+错误代码补全+修复模型【网安AIGC专题11.22】_humaneval代码纠错测试集
- 10java中java.lang.ClassNotFoundException异常
《深入浅出人工智能(第2版)》之“什么是人工智能?”_深入浅出人工智能(原理与商机)
赞
踩
1.1 什么是人工智能
“人工智能”这一术语常常使人为之一振!这其中有个原因,就是我们对智能
的迷恋。似乎正是这一点,让我们人类在所有生命形式中有了一个特殊的位置。那
么,如下问题就随之而来!什么是智能?如何测量智能?人脑是如何工作的?这些
问题对于理解什么是人工智能意义非凡!但是,对于工程师,特别是计算机科学家,
中心问题则是智能机器如何能有人一样的行为?如何在行为中体现出智能?
人工智能的人工属性可能会唤醒我们的各种联想。比如,它给我们带来对智能
机器人的恐惧,它让我们回忆起科幻小说中的景象,它使我们思考我们最崇尚的“精
神”是否可以理解、建模甚至重构?
有了以上这些天马行空的众多想法,我们要想简单且可靠地去解释人工智能
(AI)这个术语就有点难了。尽管这样,我仍然想尝试用示例和历史上有过的定义来
描述AI。1955 年,著名的人工智能先驱John McCarthy 首先给出了人工智能这一
术语的定义,简单而言就是:
人工智能的目标就是开发出像人一样聪明的机器。
要测试上述定义,读者可以想象以下情形:15 个机器人小车正移动在4 米*4
米的方形封闭区域内。我们可以观察到它们的各种行为模式:部分小车形成小群体
且运动幅度较小,有些小车则能灵巧地运动和避障,还有的小车似乎在追随着一辆
领头的小车,有时我们还可以观察到小车间的攻击性行为。那么,我们观察到的这
些小车的行为具有智能吗?
根据McCarthy 的定义,上述机器人小车就可以被认为具有智能。可是,心理
学家Valentin Braitenberg 的研究工作已经表明:以上这些看起来有点复杂的行为其
实可以由非常简单的电路产生[Bra84]。所谓的Braitenberg 小车有两个轮子,每个
轮子由一个独立的电机驱动。每台电机的速度受到装在小车前面的光传感器的影响,
如图1.1 所示。越多的光线照射到传感器上,电机转得越快。在图1.1 中,左边的
小车根据设置,将从点光源移开,右边的小车则从另一边向点光源移动。进一步的
小改动还可以创建其他行为模式。这样,通过这些非常简单的小车,我们可以理解
上面描述的这些令人印象深刻的行为。
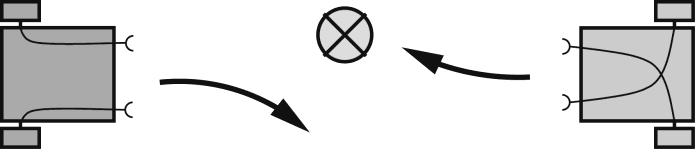
图1.1 两个非常简单的Braitenberg 小车和它们对光源的反应
显然,McCarthy 的定义是不够的,因为AI 的目标之一是解决实际应用中有难
度的问题。这对于Braitenberg 小车太苛刻了!大英百科全书中对智能给出了如下
定义[Bri91]:
人工智能是数字计算机或计算机控制的机器人具有的通常与人类高级智能处
理能力相关的解决问题的能力。
但这个定义也有不足之处。根据这个定义,具有超大内存的可以保存长文本并
能按需检索的计算机有智能。记忆长文本的能力和快速计算两个20 位数字相乘的
能力当然可以认为是人的高级智能处理能力。但是,如果是这样,按照此定义,每
台计算机都是AI 系统!这个悖论问题可由Elaine Rich 给出的定义解决[Ric83]。
人工智能研究的是如何使计算机做人类擅长做的事情。
Elaine Rich 给出的以上简洁明了的定义描述的正是最近50 年AI 研究者们一直
在做的事情。因此,即使到2050 年,这个定义也不会过时!
在短时间内执行许多计算任务是数字计算机的特长。在这方面,它们胜过人类
许多倍。然而,在许多其他领域,人类远远胜于机器。例如,进入陌生房间的人能
在不到一秒的时间内认清周围的环境,如有必要,还能迅速做出决策和行动。到目
前为止,这个任务对自主机器人来讲太难了。根据Elaine Rich 的定义,这本来就
是人工智能的一个任务。事实上,对自主机器人的研究是人工智能中一个重要、前
卫的主题。另一方面,设计会下棋的计算机则已经显得不那么有吸引力了,因为它
们已经达到相当于或高于大师的水平。
但是,如果从Elaine Rich 的定义得到人工智能就是用程序实现智能过程这样
的结论就很危险了!按照Elaine Rich 的理解,如果没有对人的推理和智能行为的本质的深刻理解,建设智能系统是不可能的,因为神经科学(详见1.1.1 节)对AI 实
在太重要了。这当然也不否认,以上其他关于人工智能的各个定义也各自反映了
AI 的一些重要方面。
人类的一种特殊智能是具有适应能力。我们有能力适应各种环境条件,并通过
学习改变我们的行为。正是因为我们的学习能力如此巨大地超越计算机,根据
Elaine Rich 的定义,机器学习只能算是AI 的一个重要子领域。
1.1.1 脑科学与问题求解
通过对智能系统的研究,我们可以尝试去理解人类大脑如何工作,然后在计算
机上建模或仿真。许多神经网络领域的想法和原理(参见第9 章)都来源于脑科学的
神经科学相关领域。
另外一种截然不同的方法是以目标为导向采取行动,首先分析问题,尝试找出
最佳解决方案。在这里,人类如何解决这个问题显得并不重要。首先且最重要的是
问题的最优智能求解方法。不采用某个固定的方法(比如,谓词逻辑),AI 有自己恒
定的目标——为尽可能多的任务构建智能体。因为任务会非常不同,目前AI 使用
的方法通常也会有很大的不同也就显得不足为奇了。医学包括许多不同的、经常挽
救生命的诊断和治疗程序。与医学类似,AI 为各种各样的应用提供众多有效的解决
方案。我们从图1.2 得到启发,如同医学一样,并没有通用的方法能应用于AI 的众
多应用领域,而是面对大量各种或大或小的日常问题有大量各种不同的解决方法。
认知科学在更高层次上专门研究人类的思维。类似于脑科学,这个领域为AI
带来了许多重要且实用的启发。另一方面,AI 的各种算法和实现使人进一步理解
人类如何推理。因此,脑科学、认知科学和人工智能这三个领域都得益于富有成效
的多学科交流。但是,本书的主题主要是关于问题导向的人工智能,它是计算机科
学的一个分支。
有许多有趣的哲学问题围绕智能和人工智能展开。我们人类有意识,那就是,
我们人类可以思考自己,甚至去探究我们人类为什么能够思考自己。意识是怎么产
生的?现在许多哲学家和神经学家却认为心智和意识是与物质联系在一起的,即大
脑。那么,机器是否有一天会有心智或意识呢?这个问题将在未来某些时候成为大
家关心的问题。心智-身体问题特别关注的是心智是否束缚于身体。本书将不讨论
这些问题。感兴趣的读者可以参看文献[Spe98,Spe97]或者参与一些关于AI 的技
术研究课程,对这些问题开展自己的研究。 图1.2 AI 提供的一个问题求解的小例子
图1.2 AI 提供的一个问题求解的小例子
1.1.2 图灵测试及聊天机器人
Alan Turing 因给出智能机器的定义而被公认为AI 的早期开拓者。一台机器要
被认为具有智能,必须通过以下测试:测试人员Alice 坐在一个带有两个电脑终端
的封闭房间里,一个电脑终端连接到一台机器上,另一个与愿意参与该测试的人员
Bob 连接。Alice 可以向两个电脑终端键入问题。五分钟后,她被要求判断哪个电
脑终端后面连着机器。如果机器可以欺骗Alice 至少30%的时间,那么机器就被认
为具有智能[Tur50]。
虽然图灵测试在哲学上非常有趣,但对于处理问题求解的实际人工智能来说,
图灵测试却不是那么切合!原因与前面提到的Braitenberg 小车相似(参见练习1.3)。
AI 先驱和社会评论家Joseph Weizenbaum 开发了程序Eliza,它能像一个人类
心理学家一样回答图灵测试问题[Wei66]。事实上,它在很多情况下都表现得很成
功。据说Joseph Weizenbaum 的秘书经常与Eliza 进行长时间的讨论。今天在互联
网上有很多聊天机器人,这些聊天机器人在对话最初的一段时间里的表现令人印象
深刻。然而,经过一定时间后,它们的人工性就显露出来了。其实,有些机器实际
上还是有学习能力的,而有些机器则拥有丰富的各种学科知识,比如一些地理软件。
现在,聊天机器人在在线客户支持和e-learning 领域已经有商业应用了。可以想象
的是,学习者和e-learning 系统可以通过聊天机器人进行交流。参见练习1.1,读者
可比较几个聊天机器人并评测它们的智能水平。
1.2 AI 的历史
人工智能汲取了许多过去在这里没有提到的科学成就。作为一门科学的人工智
能直到20 世纪中期才开始存在。表1.1 介绍了人工智能发展历程中一些最重要的
里程碑,图1.3 则用图形描述了人工智能的一些主要事件。
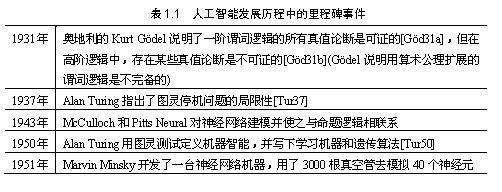
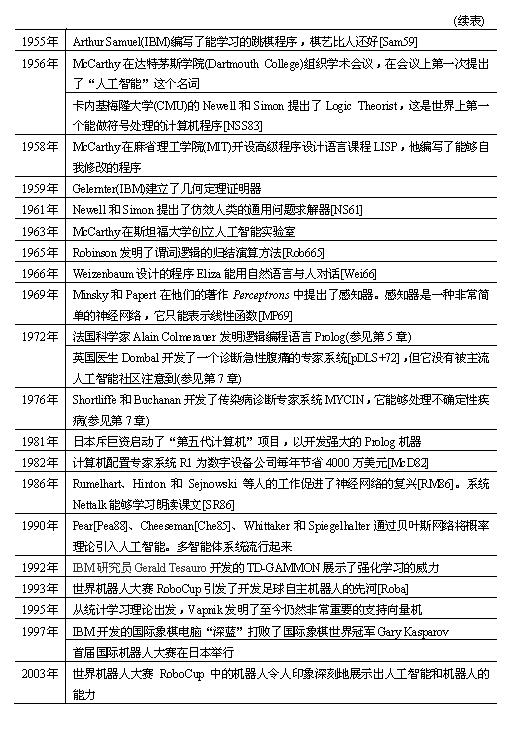
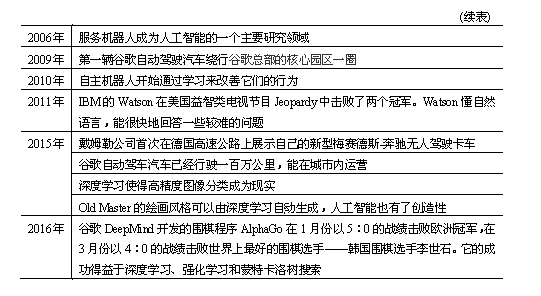
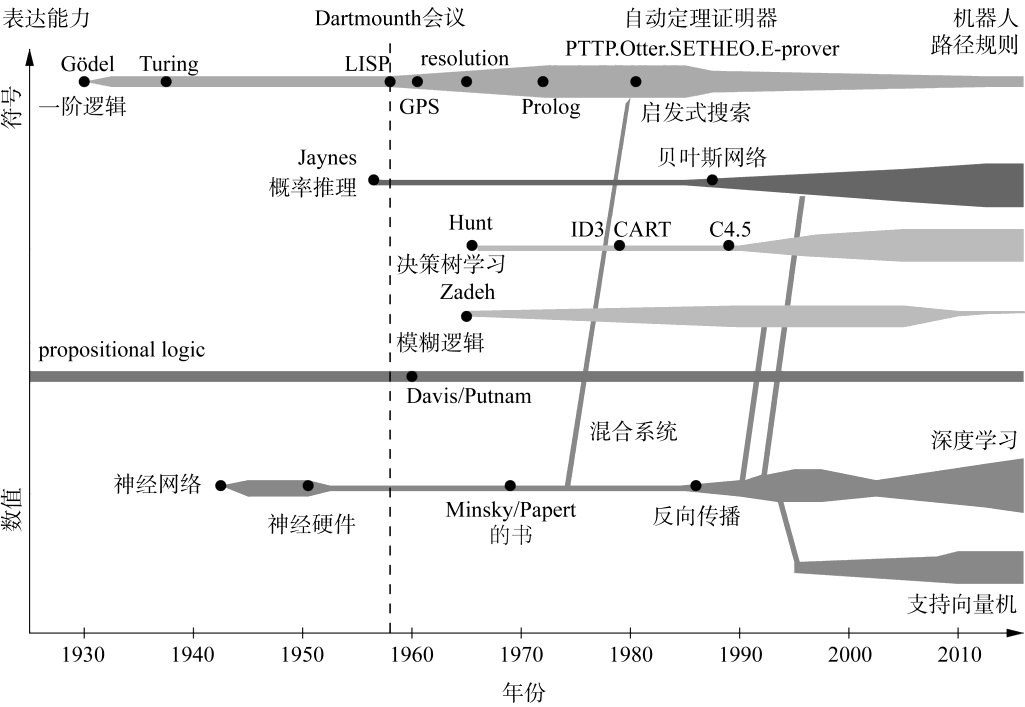
图1.3 各种AI 领域的发展史,线条的宽度表示算法的流行度
1.2.1 人工智能的开始
在 20 世纪30 年代,Kurt Gödel、Alonso Church 和Alan Turing 为逻辑和理论
计算机科学奠定了重要基础。尤其是Gödel 的理论对人工智能意义非凡。完备性定
理表明一阶谓词逻辑是完备的。这意味着每一个在谓词逻辑中形式化的真值论断都
可用形式化演算的规则证明。在此基础上,自动定理证明器就可以用形式化演算构
造出来。利用不完备理论,Gödel 证明了在高阶逻辑中存在不能被证明的真值论断。
通过这些研究,他揭示了形式化系统的适用范围。
同样在这一时期,Alan Turing 给出了图灵停机问题的不可判定性证明。他表明,
没有一个程序能够计算一个给定的任意程序(及相应的输入)是否能在有限的时间
内完成运行。通过图灵停机问题,Alan Turing 证明了智能程序的不足。例如,永远
不会存在通用的程序验证系统。
在 20 世纪40 年代,基于神经科学的结果,McCulloch、Pitts 和Hebb 设计了
神经网络的第一个数学模型。然而在那个年代,计算机缺乏足够的算力去模拟简单
的大脑。
1.2.2 基于逻辑的问题求解
作为思维机械化的实践科学,人工智能理所当然只能从可编程计算机开始。20
世纪50 年代,Newell 和Simon 介绍了Logic Theorist 所做的工作。Logic Theorist
是第一个自动定理证明器,它通过计算机来展示其功能。虽然它实际上只能用数字
来计算,但它能处理符号。与此同时,McCarthy 介绍了一种用LISP 开发的专门用
于符号处理的程序设计语言。这两个系统都是在历史上著名的1956 年达特茅斯会
议上被介绍的。1956 年被认为是AI 元年。
在美国,LISP 发展成为实现符号处理AI 系统最重要的工具。此后,逻辑推理
规则成为一种解决谓词逻辑的完备演算方法。
在 20 世纪70 年代,逻辑编程语言Prolog 被引入欧洲成为LISP 的替代编程语
言。Prolog 的优越之处在于允许直接使用谓词逻辑的子集——Horn 子句编程。就
像LISP,Prolog 有便于处理列表的数据类型。直到20 世纪80 年代,人工智能领
域才有了众多的突破,尤其是其中的许多逻辑学家。这其中的原因在于符号处理领
域取得了一连串令人印象深刻的成就。日本的第五代计算机系统工程和欧洲的
ESPRIT 计划都投入巨资建设智能计算机。对于小问题,自动定理证明器和其他符
号处理系统一般情况下会工作得很好。然而,搜索空间的组合爆炸限制了它们的进
一步成功。这个阶段的AI 在[RN10]中被描述为Look, Ma, no hands!的时代。
因为 AI 系统在经济上的成功没有达到预期,在美国,基于逻辑的人工智能研
究项目得到的基金资助在20 世纪80 年代急剧下降。1.2.3 新联接主义
在这个对人工智能希望幻灭的阶段,计算机科学家、物理学家和认知科学家仍
然能够通过使用算力足够强大的计算机,来展示经过数学建模的神经网络能够通过
学习训练样本去执行以前需要昂贵编程的任务。由于这种系统的容错性和识别模式
的能力,特别是在模式识别中,这种系统取得相当大的成功成为可能。图像中的人
脸识别和手写体的识别就是两个很好的成功案例。Netaltk 系统能够从示例文本中
学习到语音[SR86]。有了联接主义这一说法,AI 的一个新的分支学科就诞生了。
联接主义很快得到了发展,经费支持也源源不断,但它的局限性很快暴露出来。
神经网络可以获得令人印象深刻的学习能力,但它常常学不到用简单的公式或逻辑
规则描述的概念。将神经网络与逻辑规则或人类专家的知识相结合的尝试遇到了很
大困难。此外,对于神经网络的结构化和模块化也没有令人满意的解决方案。
1.2.4 不确定性推理
作为一门实用的、目标驱动的科学,AI 探索了走出这场危机的出路。人们希
望把逻辑表达知识的能力与神经网络结合起来以处理不确定性问题。这里提出了几
种替代方案。
最有希望的是概率推理。它使用条件概率来进行命题演算。自那以后,建立了
许多诊断和专家系统,它们使用贝叶斯网络解决日常推理问题。贝叶斯网络的成功
源于直观的可理解性、条件概率的清晰语义,以及有百年数学基础的概率论。
逻辑只能用两个真值来工作,其弱点可用模糊逻辑解决。模糊逻辑颇有特色地
在0 和1 之间引入了无穷多个值。虽然直到今天,它的理论基础还不够坚实,但它
仍然被成功地应用,特别是在控制工程中。
通过一条非常不同的路径导致逻辑和神经网络成功集成的是混合系统。例如,
神经网络被用于通过启发式学习减少命题证明中的组合搜索空间[SE90]。
从数据中学习的决策树方法也使用概率理论。像CART、ID3 和C4.5 这样的系
统可以快速、自动地构建代表命题逻辑概念的精确决策树。它们被用作专家系统。
现在它们成了机器学习的宠儿。
自1990 年以来,数据挖掘在统计数据分析领域已经发展成为AI 的一个分支学
科,用于从大型数据库中提取知识。数据挖掘并没有给AI 带来新的技术,但它提
出了使用大型数据库获取显性知识的方法。一个有巨大市场潜力的应用就是它激发
了通过分析数百万顾客购买记录来进行大型商业广告的投放。作为代表,机器学习
技术(如决策树学习)在这里起到了重要作用。1.2.5 分布式的自治且有学习能力的智能体
自1985 年开始,分布式人工智能(DAI)就成为一个活跃的研究领域。它的目标
之一是使用并行计算来提高问题求解的效率。然而,事实表明,因为大多数问题的
计算复杂度太高,使用“智能”系统比并行化本身更有用。
一种理念非常不同的方法起源于软件智能体和机器人的发展,它们的目的是像
人类团队一样合作。例如Braitenber 小车,其中有许多即使资源充足也无法靠一个
单独的智能体进行问题求解的情况。只有依靠许多智能体的协作才能产生智能行为
或者实现问题求解。蚂蚁群或白蚁群能够建造结构非常复杂的建筑物,尽管没有一
个蚂蚁知道整体上如何建造这样的建筑物。这与给纽约这样的大都市供应面包的情
况相似[RN10]。其中并没有中央计划机构负责面包的供应,而是有数百名这样的
面包师,他们知道城市各个区域的需求并为这些区域烘焙数量适当的面包。
机器人的主动技能获取是当前一个令人兴奋的研究领域。例如,现在已经有了
能独立学习步行或执行与足球相关的各种运动技能的机器人。但是,多个机器人通
过合作学习一同进行问题求解的领域仍处于起步阶段。
1.2.6 人工智能的进一步发展
今天AI 提供的上述系统并不是一个通用的配方,而是一个车间,它有非常多
的工具以适用于非常不同的任务。大多数工具已经开发得很好,已经能作为已完成
开发的软件库使用,这些工具还通常具有很方便的用户界面。工具的正确选择及其
合理使用留给人工智能开发者或知识工程师解决。像其他任何技艺一样,这需要扎
实的教育,本书的目的就是促进人工智能的教育。像任何其他科学一样,人工智能
也是跨学科的,因为它借鉴了逻辑学、运筹学、统计学、控制工程、图像处理、语
言学、哲学、心理学及神经生物学等多个领域众多有趣的发现。最重要的是,AI
还有自己特定的问题领域和应用。因此,成功地开发一个人工智能项目并不总是如
此简单,但几乎总是非常激动人心。
1.2.7 人工智能革命
2010 年,大约在开始神经网络研究的25 年后,科学家们的研究成果开始有回
报了。例如,非常强大的深度学习网络能以非常高的精度对图像进行分类。对于所
有类型的智能机器人,图像分类至关重要!这可以算作人工智能革命的开始!深度
学习又导致智能车和服务机器人的诞生。1.3 人工智能与社会
有许多科学类书籍和科幻小说都介绍过人工智能。由于AI 研究取得的巨大进
展,大约从2005 年开始我们就进入了自主机器人时代和物联网时代。因此,我们
在日常生活中越来越多地面对人工智能。作为本书的读者,你也许会很快成为人工
智能研发者,必须了解人工智能对社会的影响。作为一本关于AI 技术著作的作者,
我有义不容辞的责任来探讨这一主题,还将探讨人工智能的一些特别重要的方面。
这些内容与我们的生活密切相关。
1.3.1 人工智能会抢夺人类的工作吗
2016 年1 月,世界经济论坛发表了一项被德国媒体频繁引述的研究[SS16]。该
研究预测“工业4.0”将在未来五年内消灭500 万个就业岗位。这个预测不足为奇,
因为自动化技术在工厂、办公室、行政、交通、家庭以及许多其他领域的应用已经
导致越来越多的工作由计算机、机器和机器人承担。自2010 年以来,人工智能一
直是这一趋势中最重要的影响因素之一。
想必大多数人都不乐意干耗体力、不干净、不健康的工作,而愿意将这些工作
留给机器去完成。因此,如果技术不产生副作用,比如导致环境污染,那么自动化
对于我们人类来讲完全是福音!机器可以更快、更准确尤其是更便宜地完成上述这
些令人不愉快的工作。人类做得更少,或者根本不需要去做那些令人不愉快的工作,
人类反而有了更多的时间去享受生活中的美好事物。我们也会享受同样的(潜在的甚
至一直增长的)繁荣,因为如果机器不能提高生产效率,经济社会就不会使用它们。
著名物理学家Stephen Hawking 在社区www.reddit.com 对他的采访中,给出了
以下解答:
如果机器生产了我们所需的一切,那么结果将取决于这些东西如何被分配。如
果机器生产的财富能共享,那么每个人都可以享受奢华的休闲生活。否则,如果机
器的所有者成功鼓动反对财富再分配,大多数人最终都会穷困不堪。
1.3.2 AI 与交通
在过去的130 年中,汽车工业工程师们取得了长足的进步。在德国,每两个人
中就有一人拥有自己的汽车。这些汽车性能很可靠,这使我们不管去哪里都很方便,
我们在工作、日常生活与休闲中也得益于汽车。而且,我们离不开汽车了。今天,
没有机动车辆,特别是在公共交通体系较弱的农村地区,我们会觉得日子很难过。
增加道路运输的便利性已经迫在眉睫。几年后,我们将能够购买自动驾驶电动
汽车,也就是机器人车。它会自动把我们带到几乎任何目的地。机器人车中的乘客
可以在旅途中阅读、工作或睡觉。可以独立运行的自主车辆也可以不搭载驾驶员行驶。
这将导致便利性的进一步
增加:机器人出租车。通过智能手机应用程序,我们将能够根据尺寸和配置订购最
佳的出租车,以达到任何可想象的运输目的。我们将能够选择独自乘坐出租车还是
愿意和其他乘客一起拼车。我们不再需要自己的汽车了。所有相关责任和费用,如
加油、技术服务、清洁、寻找停车位置、车辆买卖、车库租金等都不需要了,这将
使我们省钱又省力。
除了我们能马上获得舒适和方便外,机器人车也将给我们带来其他显著的优势。
例如,根据麦肯锡研究院的研究[GHZ14],我们将需要更少的汽车,最重要的是,
在自动驾驶时代,停车位的需求要少得多。这将导致资源消耗的巨大减少。根据劳
伦斯伯克利国家实验室的研究[GS15],由于车辆能量效率的提高以及车辆与用途之
间实现了最佳匹配,自驾车将使每一乘客公里的温室气体排放减少90%。由于实现
了最佳的资源利用率,机器人出租车将非常多,且更环保。例如,重型巴士经常运
行在车辆容量低的地区,特别是在农村地区。总体而言,机器人出租车将有助于大
量节约能源,因而,除此之外,还能显著地改善二氧化碳排放和气候问题。
乘客的安全性也将比现在高得多。专家估计,与今天相比,未来事故率将介于
零和百分之十之间。情绪驾驶(路怒症)、分心驾驶和酒驾将不再存在。
出租车司机失业往往被认为是机器人车带来的恶果。几乎可以肯定的是,从
2030 年起就不会再有出租车司机了。但是,这并不是问题。
除了上面提到的许多优点之外,机器人车还会带来两个关键问题。首先,所谓
的反弹效应至少会使在资源、能源和时间方面节约得到的收益部分减少。更短的驾
驶时间,更舒适、更便宜的驾驶会诱惑我们多开车。我们只能通过重新思考我们对
待消费和生活质量的态度来处理这个问题。我们必须使用节约的全部时间去做更多
的活动吗?在这里,我们应该进行批判性反思。
我们应该认真对待的另一个问题是机器人车需要联网。原则上,这给黑客和恐
怖分子提供了通过网络协议中的安全漏洞来访问和操纵车辆控制系统的能力。如果
黑客一旦要这么做,就可以实施大规模的重复攻击,这可能使整个车队停止、造成
事故、监视乘车人或启动其他犯罪行为。在这里,与其他领域一样,对于家庭自动
化和物联网,需要IT 安全专家使用加密方法之类的协议工具以确保最可能的安全
保证。顺便说一句,改进的机器学习算法将有助于检测黑客攻击。
1.3.3 服务机器人
几年后,也就是自动驾驶汽车出现后不久,下一波将在电子商店上架的诱人消
费就是服务机器人。最近,谷歌的子公司Boston Dynamics 提供了一款令人印象深
刻的类人机器人Atlas。像新出的车型一样,我们欣喜地看到,服务机器人在舒适性
和便利性方面有了长足的长进。人们只需要想象这样的机器人,它在晚会结束后
从晚到早没有一句牢骚地打扫和擦洗。或者想象图1.4 中Marvin 这样的援助机器
人,它可以为老年人或残疾人士提供帮助[SPR+16 ]。
图1.4 在AsRoBe 研究项目中部署的援助机器人Marvin
然而,与机器人车相比,这些好处来自昂贵的权衡取舍。全新的市场将被创造,
更多的自然资源和能量会被消耗,但是我们甚至还不能确定人们的生活是否会因为
服务机器人的广泛使用而得到简化。
因此,更重要的是,在这些机器人上市之前,我们应就这个话题进行深入的社
会讨论。一些科幻电影描述了服务机器人作为老年人帮手的令人愉悦的一面,这也
将引发这样的社会讨论。
1.4 智能体
虽然智能体这个术语对人工智能来说并不陌生,但近年来它却得到了前所未有
的关注[RN10]。智能体通常指的是能处理信息并从输入产生输出的系统。这些智能
体可以按许多不同的方式分类。
在经典的计算机科学中,主要采用软件智能体(参见图1.5)。这种情况下,智能
体由能够根据用户输入计算结果的程序组成。
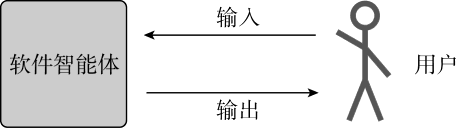
图1.5 一种有用户接口的软件智能体
另一方面,在机器人学中,主要采用硬件智能体(也称为自主机器人)。硬件智
能体采用额外的传感器和执行器完成任务(参见图1.6)。硬件智能体可以用传感器感
知环境,用执行器执行动作并改变环境。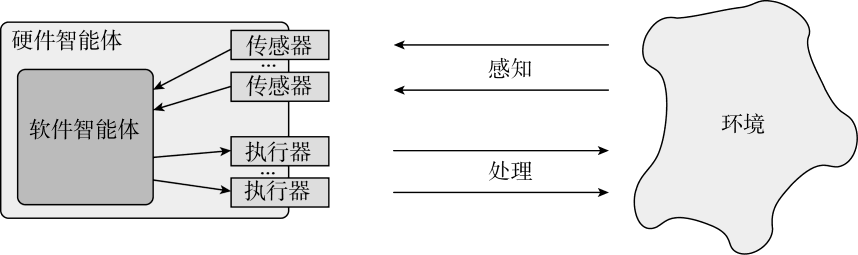
图1.6 一种硬件智能体
关于智能体的智能,只对输入做出反应的反射智能体和能将历史经验用于决策
的具有内存的智能体有着明显区别。例如,作为反射智能体的驱动机器人能通过其
传感器知道自己确切的位置(和时间),但无法确定速度。然而,如果它每隔一个离
散的、较短的时间步长存储其位置数据,它就可以很容易计算其在前面时间间隔里
的平均速度。
如果反射智能体是由确定性程序控制的,那么它表示一个从输入集到输出集的
函数。另一方面,具有内存的智能体本质上不是一个函数,为什么?参见练习1.5。
在需要解决的问题涉及马尔可夫决策过程的情况下,反射智能体足够了。在这个决
策过程里,确定下一步的最优行动只需要当前状态(参见第10 章)。
在一栋建筑物中,移动机器人从112 房间移动到179 房间,与移动到105 房间
所采取的行动不同。换句话说,行动取决于目标。这样的智能体被称为基于目标的
智能体。
例1.1:垃圾邮件过滤器就是一种智能体。它将输入的电子邮件分类成用户需
要的和用户不需要的,并将不需要的(垃圾邮件)删除。作为基于目标的智能体,它
的目标是把所有电子邮件放入正确的类别。在这个并不是那么简单的过程中,智能
体有时也会犯错。因为它的目标是对所有邮件进行正确分类,尽量少犯错误。然而,
这并不总是用户心中的想法。让我们比较如下两个智能体。在1000 封电子邮件中,
智能体1 只产生12 个错误。智能体2 在这相同的1000 封电子邮件中产生38 个错
误。智能体2 比智能体1 更差么?下面的图1.7 更详细地显示了这两个智能体的错误情况。
这就是所谓的“混淆矩阵”。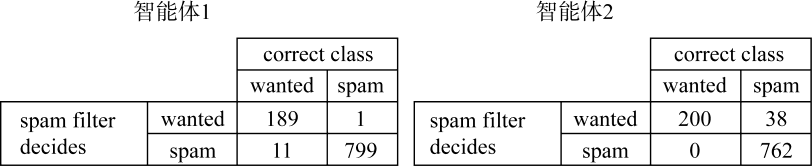
图1.7 智能体的错误情况
智能体1 实际上比智能体2 少犯了错误,但那些错误是严重的。这是因为用户
丢失了11 封可能很重要的电子邮件。因为这两种类型的错误的严重程度不同,每
个错误都应该用适当的加权来表示(参见7.3.5 节和练习1.7)。所有加权误差的总和
给出了由错误决策带来的总成本。基于成本的智能体的目标是最小化长时期内错误
决策的平均成本。在7.3 节中,我们熟悉的医学诊断系统LEXMED 就是一个基于
成本的智能体。
类似地,基于效用的智能体的目标是最大化长时期内的平均效用输出。所有决
策与其各自的效用因子加权给出总效用。
在AI 中,特别令人感兴趣的是学习智能体,它们能够学习输入的训练样本,
或通过正向或负向的反馈改变自己,这样能使行为的平均效用随着时间的增长而增
长(参见第8 章)。
正如1.2.5 节提及的,分布式智能体越来越多地被投入使用。它的智能并不受
限于单个智能体,而是通过多个智能体的合作显示出来。
智能体的设计和目标强烈面向环境,或者依靠传感器感知的环境地图。如果智
能体总是知道世界完整的状态,那么环境是可观察的。否则,环境只能是部分可观
察的。如果一个行动总是导致相同的结果,那么环境是确定性的,否则是不确定的。
在离散环境中只有有限多个状态和行为发生,而连续的环境拥有无限多个状态和行为。
1.5 基于知识的系统
智能体是一种实现从感知到动作的映射的程序。对于简单智能体,这种看待问
题的方式就足够了。而复杂应用中的智能体必须能够使用大量信息,并且意味着要
完成一项困难的任务。对这种智能体编程可能非常昂贵,甚至于还不清楚如何进行。
这里AI 提供了一条清晰的可供沿用的路径,这将大大简化编程工作。
首先,我们将知识从系统或程序中分离出来,这些系统或程序使用这些知识得
出结论、回答查询、设计计划。这种系统被称为推理机制。知识存储在知识库(KB)中。知识库中知识的获取叫作知识工程。知识工程基于各种诸如人类专家、知识工
程师及数据库的知识源。主动学习系统也可以通过主动探索世界来获取知识(见第
10 章)。图1.8 提出了基于知识的系统的一般体系结构。
将知识和推理分离有几个突出的优势。知识和推理的分离允许推理系统可以独
立于大规模应用的方式来实现。例如,将一个医学专家系统应用于其他疾病时,可
以通过替换其知识库来完成,而不需要编程实现一个全新的系统。
通过知识库与推理的解耦,知识可以采用事先声明的方式存储。知识库中只描
述了知识,它在应用中独立于推理系统。没有这种清晰的分离,知识和推理步骤的
处理将交织在一起,对知识的任何改变将会非常昂贵。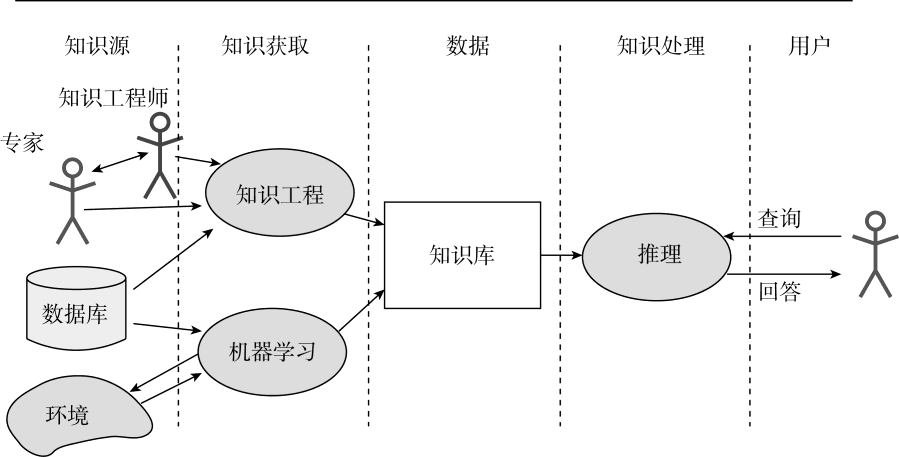 图1.8 经典的基于知识的系统的一般体系结构
图1.8 经典的基于知识的系统的一般体系结构
形式语言作为人与机器之间方便的接口,适合于在知识库中表示知识。在随后
的各章中,我们将了解一系列这样的语言。首先,在第2 章和第3 章中有命题演算
和一阶谓词逻辑(PL1),但其中也介绍了概率逻辑和决策树等。我们将从命题演算
和相关的推理系统开始,以此为基础,我们将介绍谓词逻辑。这是一种强大的可以
通过机器访问的语言,在AI 中非常重要。
作为一个大规模知识系统的例子,我们想提及软件智能体Watson。它由IBM
及多所大学共同开发。Watson 是一个问题问答程序,可以用自然语言作为对话线
索输入。Watson 是在IBM 的深度QA 项目中开发出来的[De11]。IBM 的深度QA
项目提出了计算机科学领域的一个重大挑战。深度QA 项目以展示自然语言的理
解能力的增长,以及自然语言处理、信息获取、机器学习、知识表示与推理、
大规模并行计算的集成与进步怎样驱动开放的自动QA 技术清晰且一致地达到
人类的最好水平为目的。
2011 年2 月,在美国电视智力竞赛节目Jeopardy!中,Watson 在一场比赛中
击败了两个人类冠军Brad Rutter 和Ken Jennings,并赢得了一百万美元的奖金。
Watson 的一个特殊优点是它对问题的反应非常迅速。Watson 经常比人类对手更快
地按下抢答器,然后给出这个问题的第一个答案。
Watson 的高性能和短反应时间是由于它运行于90 个IBM 750 服务器上,其中
每个服务器包含32 个处理器,相当于2880 个并行处理器。
1.6 练习
练习1.1 测试网络上一些可用的聊天机器人,例如www.simonlaven.com 或
www.alicebot.org。写下一个问题,并测量每个聊天机器人所需的时间,直到你确定
对方不是一个人。
❄❄练习1.2 在 www.pandorabots.com 上,可以找到一个服务器,在该服务器上可以很
容易地使用标记语言AIML 构建聊天机器人。取决于你的兴趣水平,开发一个简单
或复杂的聊天机器人,或改变现有的一个。
练习 1.3 给出图灵测试不适用实际人工智能应用中“人工智能”的定义的原因。
➳练习1.4 许多著名的推理过程、学习过程等都是NP 完全甚至不可决定的。这对人
工智能意味着什么?
练习 1.5
(a) 从数学意义上讲,为什么具有内存的确定性智能体不是从所有输入集合到所有
输出集合的函数?
(b) 如何修改具有内存的智能体或对其进行建模,使其与函数等效,但不会丢失其
内存?
练习 1.6 让一个具有内存的智能体可以在一个平面内移动。它借助传感器,每隔固
定时间间隔t 获取其在笛卡尔坐标系中的精确位置(x,y)。
(a) 给出一个公式,利用该公式,智能体可以计算从当前时间t到之前时间t t 的
速度。
(b) 如何更改智能体,以便它可以计算其加速度?请提供一个公式。
❄练习1.7
(a) 确定例1.1 中的两个智能体因错误产生的代价,并比较结果。假设手动删除一封垃
圾邮件花费1 美分,检索一封已删除或丢失的电子邮件花费1 美元。
(b) 确定两个智能体正确分类产生的收益,并比较结果。假设每识别出一封符合预期
的邮件,就会获得1 美元的利润,每正确删除一封垃圾邮件,就会获得1 美分的
利润。
节选自《深入浅出人工智能(第2版)》一书
想了解更多《深入浅出人工智能(第2版)》内容,请点击:https://item.jd.com/12778744.html

