
热门标签
热门文章
- 1基于PIE-Engine AI的城市交通综合要素智能提取_光伏电站、违章建筑、道路检测、农作物识别等工程应用案例表明,pie-engine ai的识
- 2基于SnowNLP的商品评论文本情感分析_snownlp情感分析
- 3手把手教你用Python轻轻松松开发一个聊天机器人系统。_python用keras中sequential创建会话机器人
- 4鸿蒙HarmonyOS应用开发之USB DDK开发指导
- 5[渝粤教育] 西南科技大学 微机原理与应用 在线考试复习资料(1)_0.(4分)9、十进制数可以转换成二进制数,十进制数31转换成二进制数是( ) a.110110
- 6鸿蒙开发之有哪些动画效果(HarmonyOS鸿蒙开发基础知识)_鸿蒙系统动画
- 7CSS3 @media screen 屏幕自适应_mediascreen
- 8基于多目标视频图像边缘特征的核相关滤波跟踪算法
- 9bert-create_pretraining_data代码学习_# coding=utf-8 # copyright 2018 the google ai team
- 10华为鸿蒙系统安装第三方软件 - 注意事项_仅支持安装经过华为应用市场安全检测的应用
当前位置: article > 正文
库卡机器人怎么用c语言写程序,KUKA机器人之了解简单的机器人程序
作者:羊村懒王 | 2024-04-09 15:43:59
赞
踩
库卡机器人编程
首先提出几个问题:
机器人是怎记住位置的?
机器人是怎么到达它的目标点的?
到达目标点的速度多快?
什么样的姿态到达?
机器人能不能识别障碍?
带着这些问题我们开始学习第一条指令
PTP运动指令
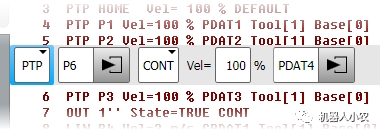
运动指令在示教器上是酱紫的。被称为“联机表单”,通过输入或者选择就可以实现运动指令的编辑
机器人就是通过这些运动指令记住自己需要到达的目标位置的。
我们来学习一下怎么添加一个这样的运动指令
前提条件
已设置运行方式 T1
机器人程序已选定。
1. 将 TCP 移向应被示教为目标点的位置。
2. 将光标置于其后应添加运动指令的那一行中。
3. 菜单序列指令 > 运动 > PTP。也可按下“运动”。
就会出现这样一个联机表单

1.运动类型 PTP/LIN/CIRC
2.目标点的名称
3.是否精确到达目标点
4.运行速度
5.运行参数
其中2和5都带有
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/羊村懒王/article/detail/393732?site
推荐阅读

相关标签

