
热门标签
热门文章
- 1机器学习技术-层次聚类算法(组平均)-综合层次聚类方法(BIRCH、CURE)_birch cure
- 2C++ libVNC开源库_rfbinitclient
- 3Kali渗透测试:通过Web应用程序实现远程控制_chrome远程控制kali
- 4自然语言处理中的文本迁移学习与零散数据学习
- 5【MATLAB源码-第22期】基于matlab的手动实现的(未调用内置函数)CRC循环码编码译码仿真。
- 6transformer的实现+详细注释,不来看看吗_transformer实现
- 7demonstration记忆_单词记忆法
- 8LIDA:让LLM自动可视化数据-《LIDA: A Tool for Automatic Generation of Grammar-Agnostic Visualizations and Info》_lida库
- 9信用评分卡建模:决策树模型_使用树模型做评分卡
- 10在VMware ESXi虚拟机上设置静态MAC地址_虚拟机mac地址怎设置
当前位置: article > 正文
KUKA 机器人仿真——Simpro4.1和OfficeLite8.6连接实现虚拟示教器控制仿真机器人_kuka sim pro
作者:繁依Fanyi0 | 2024-04-07 07:44:27
赞
踩
kuka sim pro
simpro4系列和OfficeLite8.6连接通信比simpro3系列简单很多但网上没多少教程,记录一下打通过程。
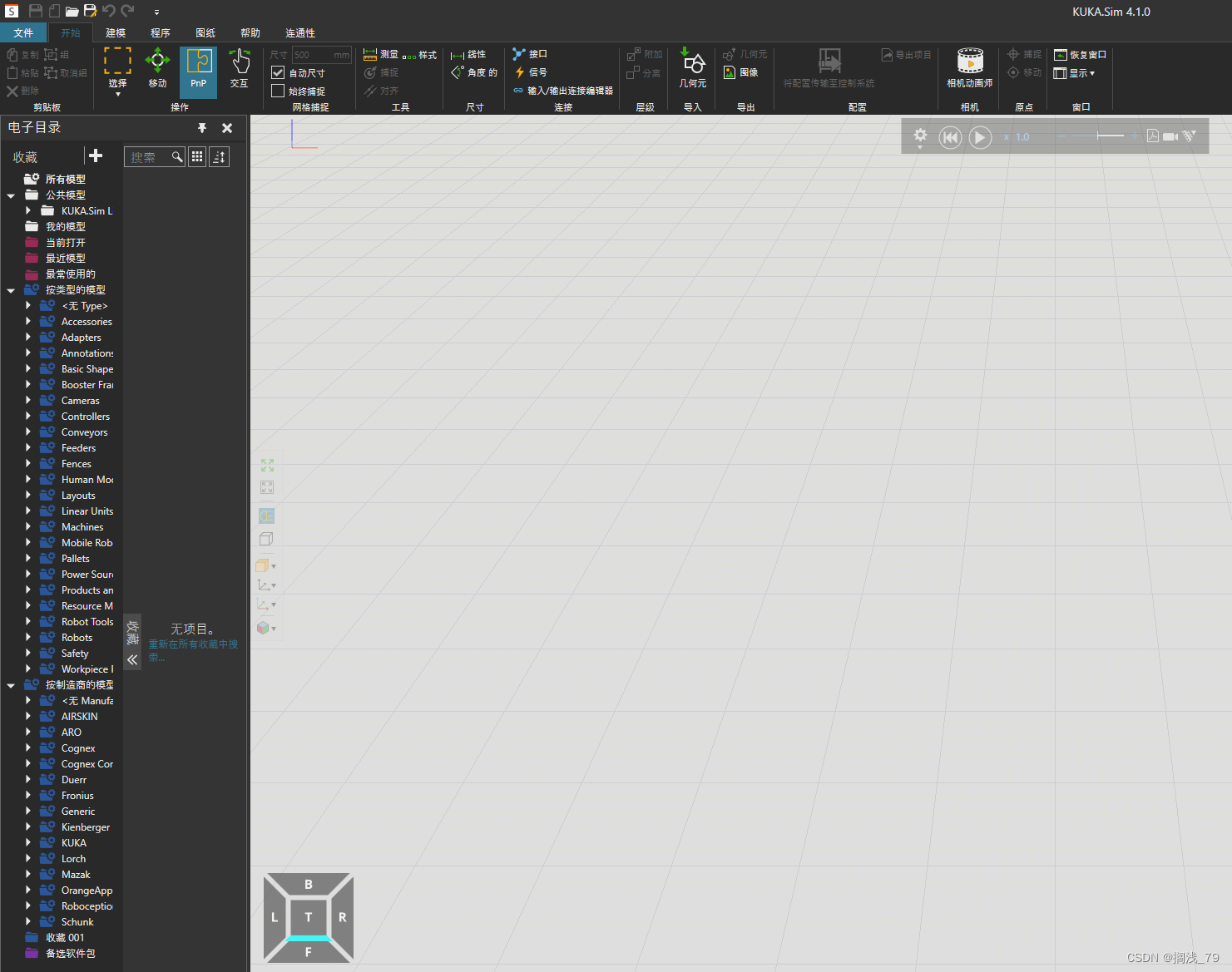
先看一下simpro4和OfficeLite8.6的界面:

先把用户设置成“管理员”,密码是“kuka”

在“机器配置”里面查看虚拟示教器加载的机器人型号。

默认型号是“KR 210 R 2700 extra”。

在simpro4中搜索该型号机器人,双击机器人图标或拖入工作界面:

在“组件属性”中选择“controller”

在“固件版本”选择虚拟示教器的版本。

示教器版本查看方式:


“程序”>“模拟配置”,把“运动”设置为“控制器”

点“...”图标
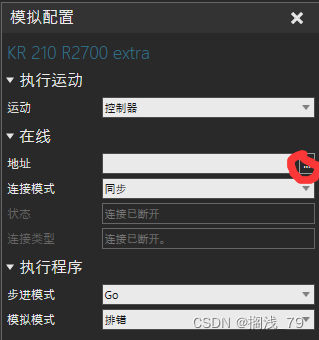
这时能检测到虚拟示教器,并显示虚拟机名称,点确定。

这时可以看到已连接,simpro软件左下角也显示已连接。


写一条程序指令运行一下,在“点动模式”下拖动机器人末端,加载指令。

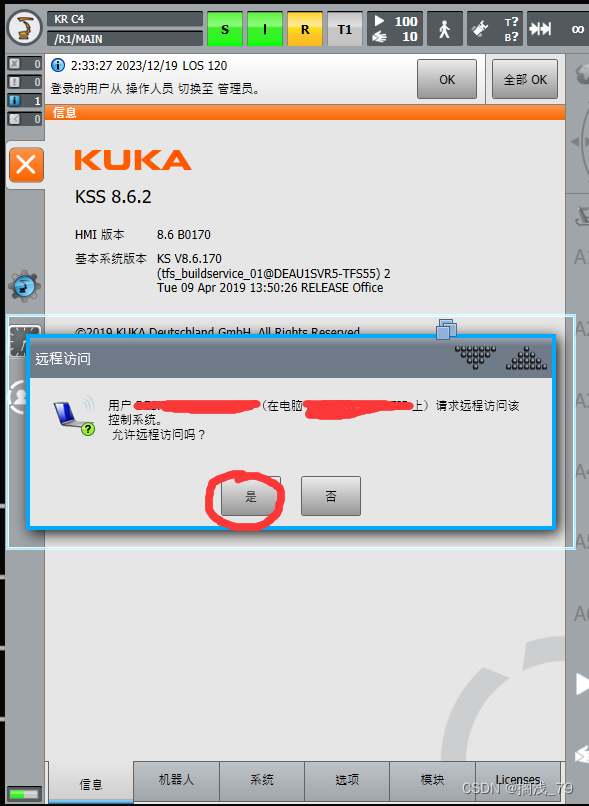
点击“播放”会弹出:

点击确定,这时虚拟示教器会提示:,点“是”,这时simpro的程序烧录进示教器,然后simpro环境的机器人按照刚设置的指令运动。
如果想用示教器实时控制机器人可以这样操作:
调出实时控制界面:

按下使能键“确认键”再点轴进给会弹出“不允许手动..........”,这是因为还在刚才的程序中没退出来

点击黑色的“R”,取消选择程序,退出刚才运行的程序,再到simpro软件中点击“暂停”,再点击播放就可以用示教器实时控制机器人运动了。


声明:本文内容由网友自发贡献,转载请注明出处:【wpsshop】
推荐阅读
相关标签

