
热门标签
热门文章
- 1微信小程序中调取小程序实现报错:提示 开发版小程序已过期,请在开发者工具中重新扫码的 解决方案
- 2视频生成新突破:PixelDance,轻松呈现复杂动作与炫酷特效
- 3哈工大深圳计算机学院副教授待遇,了不起!为什么哈工大深圳毕业生平均年薪能17万?比南京大学还高...
- 4浅谈分布式数据库_主从库算不算分布式
- 5移动端常用的开发框架 JavaScript_移动端快速开发框架
- 6CSerialPort教程4.3.x (5) - CSerialPort在cmake中的使用_vs安装cserialport库
- 7vue3怎样获取绑定页面dom元素_vue绑定dom元素
- 8华为OD机试 Java -虚拟理财游戏
- 9fabric的state统计(或设置环境——系统的和fabric本身的)
- 10用Java、C++、python实现快速排序_用 c/c++/java 语言伪代码描述快速排序算法实现过程,要求: i)给出 partition
当前位置: article > 正文
STM32F103C8T6 HAL库——从零开始的制作平衡小车生活_hal库平衡小车
作者:羊村懒王 | 2024-04-10 23:33:47
赞
踩
hal库平衡小车
最近买了个平衡小车,为了圆我PID梦,买来玩玩,废话不多说,直接开搞
第一步:让小车的轮子转起来
我用的电机是TB6612FNG,想详细了解的话直接去搜手册,给他输出两路PWM还要两个引脚进行高低电平的转换就可以设置前进或者后退了,规则如下
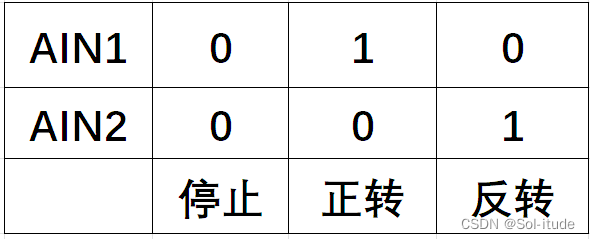
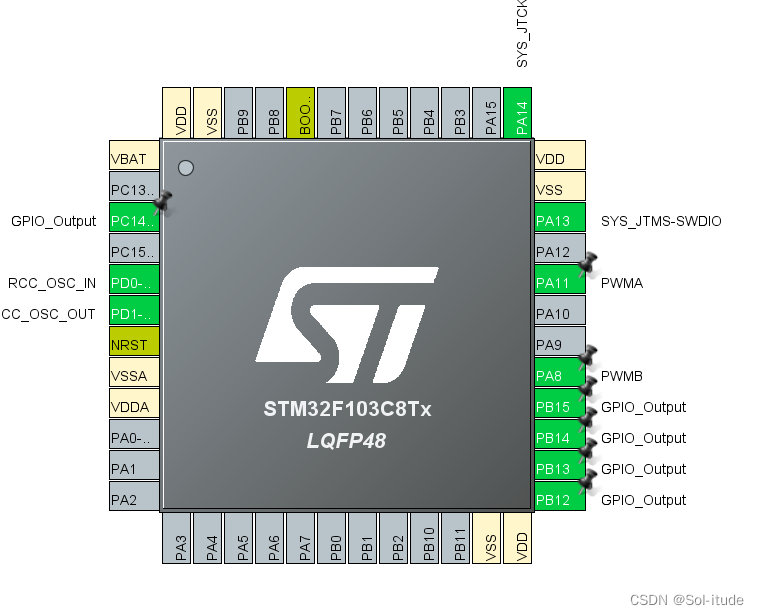
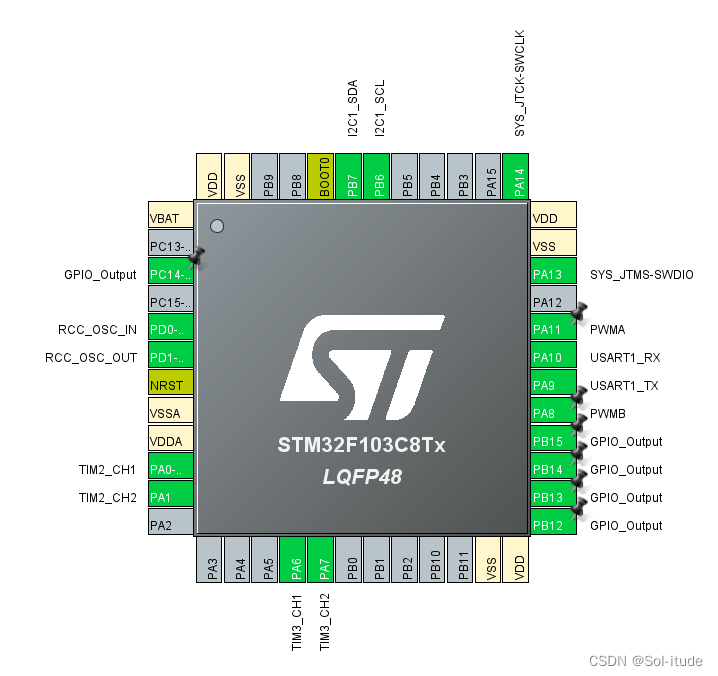
看一下引脚图吧
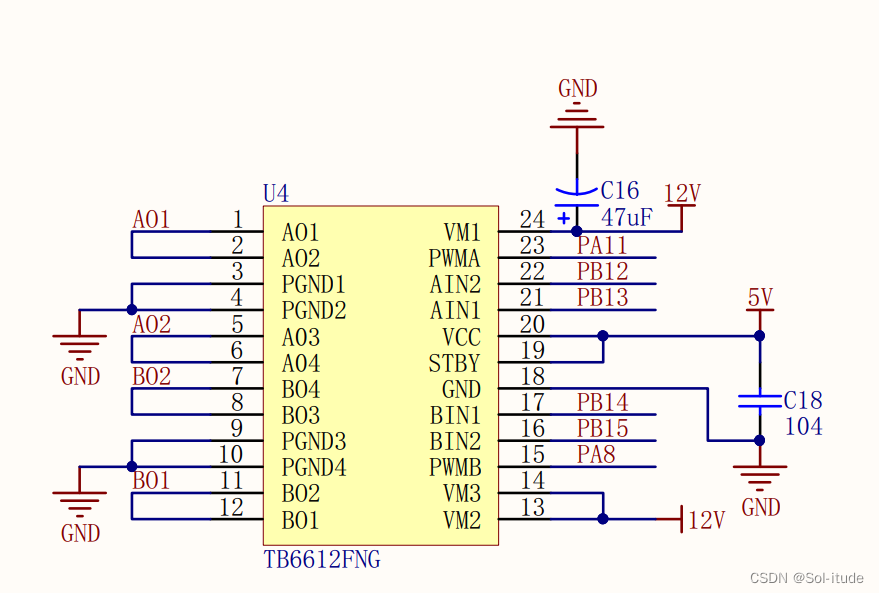
引脚连接:
| PWMA | PA11 |
|---|---|
| PWMB | PA8 |
| AIN1 | PB13 |
| AIN2 | PB12 |
| BIN1 | PB14 |
| BIN2 | PB15 |
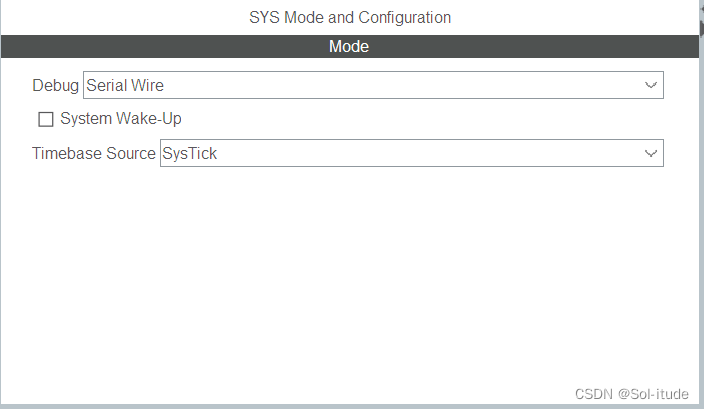
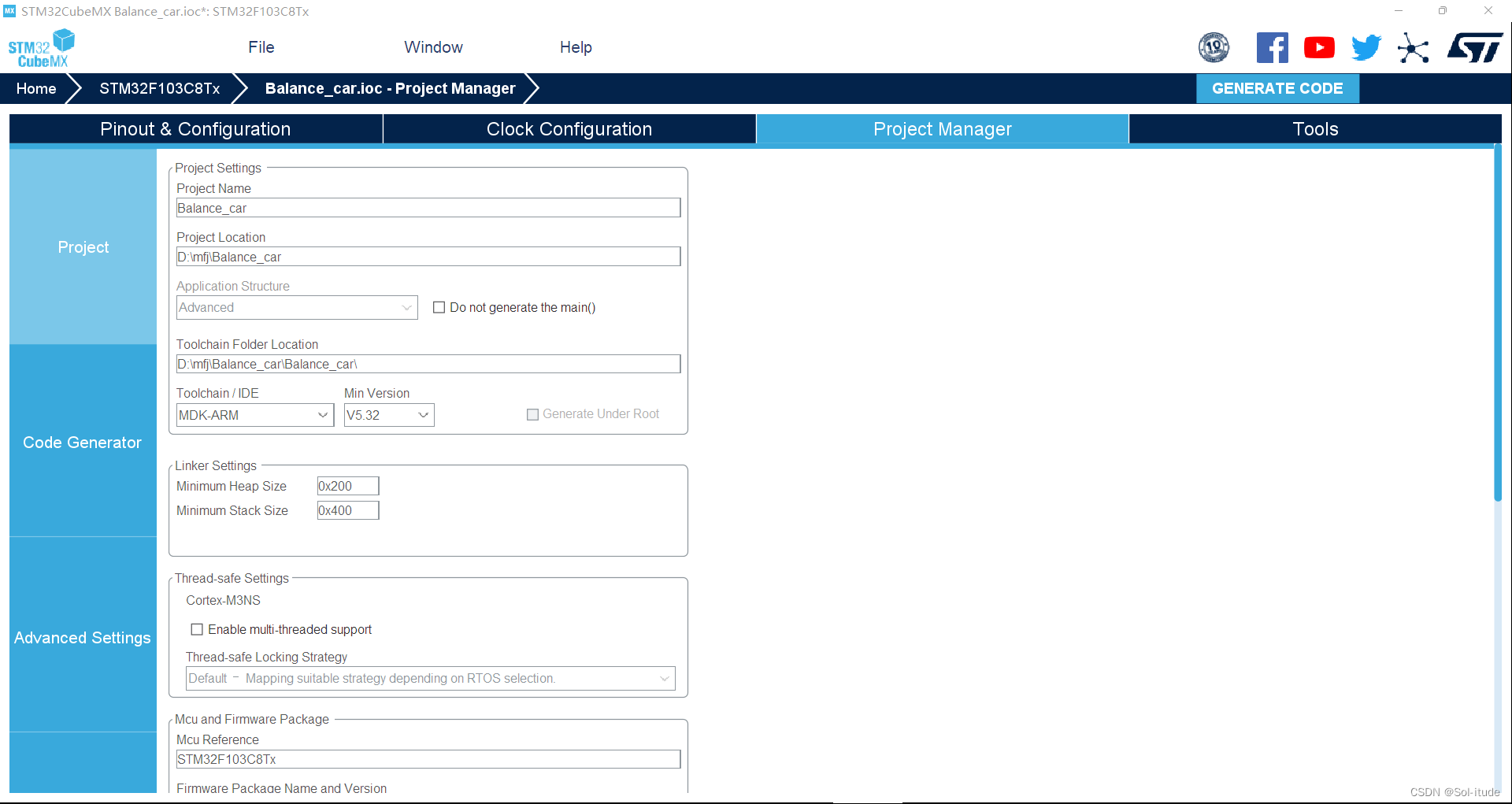
下面开始配置CUBE
首先是SYS:
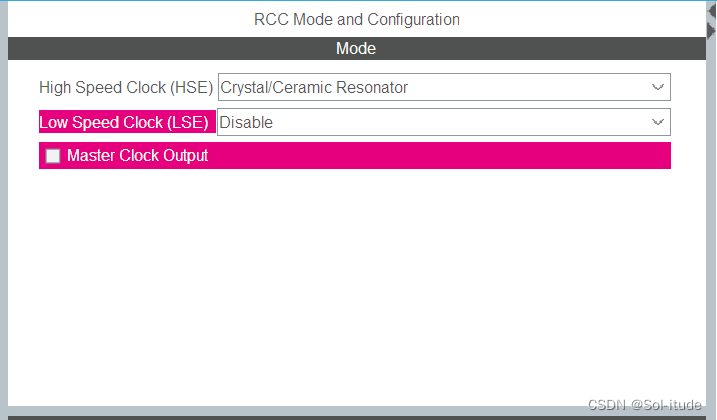
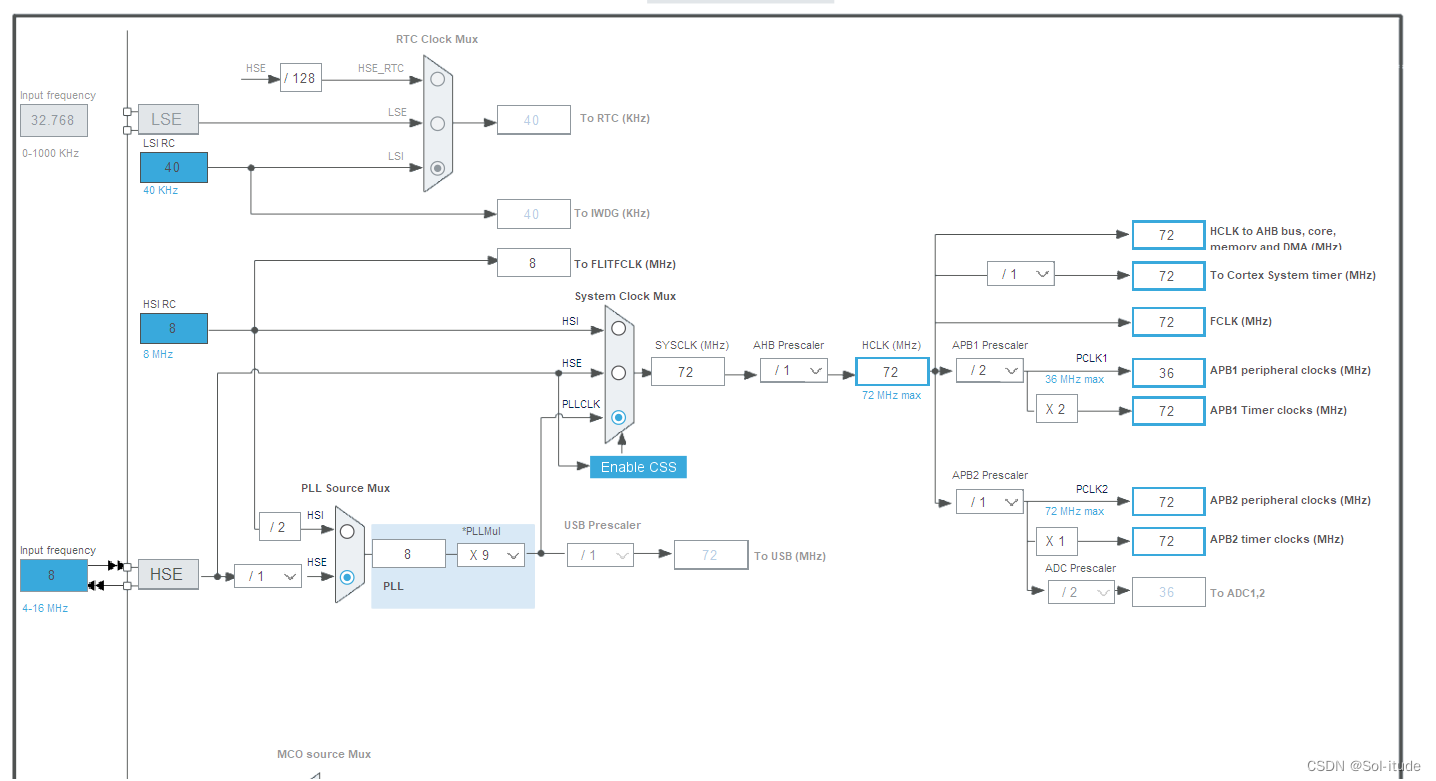
其次是时钟:
下面开始引脚的设置:
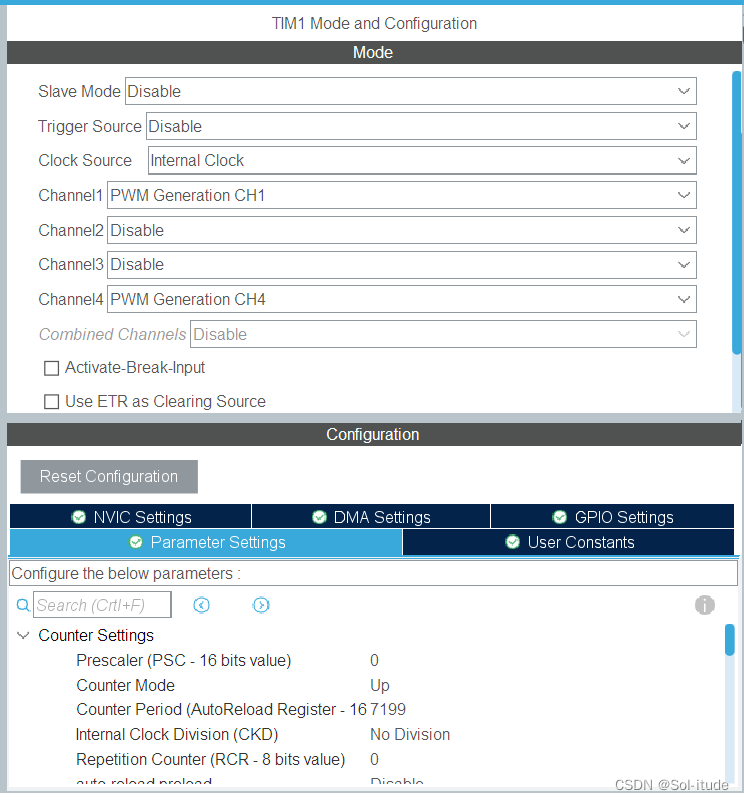
用定时器1,10Hz就够了
生成:
代码部分:
main.h
/* USER CODE BEGIN Private defines */
#define AIN2_Pin GPIO_PIN_12
#define AIN2_GPIO_Port GPIOB
#define AIN1_Pin GPIO_PIN_13
#define AIN1_GPIO_Port GPIOB
#define BIN2_Pin GPIO_PIN_14
#define BIN2_GPIO_Port GPIOB
#define BIN1_Pin GPIO_PIN_15
#define BIN1_GPIO_Port GPIOB
/* USER CODE END Private defines */
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
main.c
/* USER CODE BEGIN 2 */
HAL_TIM_PWM_Start(&htim1,TIM_CHANNEL_1);//开启TIM1_CH1
HAL_TIM_PWM_Start(&htim1,TIM_CHANNEL_4);//开启TIM1_CH4
HAL_GPIO_WritePin(AIN1_GPIO_Port,AIN1_Pin,GPIO_PIN_RESET);//AIN1为0
HAL_GPIO_WritePin(AIN2_GPIO_Port,AIN2_Pin,GPIO_PIN_SET);//AIN2位1,反转
HAL_GPIO_WritePin(BIN1_GPIO_Port,BIN1_Pin,GPIO_PIN_RESET);//BIN1为0
HAL_GPIO_WritePin(BIN2_GPIO_Port,BIN2_Pin,GPIO_PIN_SET);//BIN2位1,反转
/* USER CODE END 2 */
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
/* USER CODE BEGIN 3 */ HAL_GPIO_WritePin(AIN1_GPIO_Port,AIN1_Pin,GPIO_PIN_RESET); HAL_GPIO_WritePin(AIN2_GPIO_Port,AIN2_Pin,GPIO_PIN_SET); HAL_GPIO_WritePin(BIN1_GPIO_Port,BIN1_Pin,GPIO_PIN_RESET); HAL_GPIO_WritePin(BIN2_GPIO_Port,BIN2_Pin,GPIO_PIN_SET); for(int i=0;i<7100;i++) { __HAL_TIM_SET_COMPARE(&htim1,TIM_CHANNEL_4,i);//让轮子转起来 HAL_Delay(1); } for(int j=7100;j>0;j--) { __HAL_TIM_SET_COMPARE(&htim1,TIM_CHANNEL_4,j); HAL_Delay(1); } for(int i=0;i<7100;i++) { __HAL_TIM_SET_COMPARE(&htim1,TIM_CHANNEL_1,i); HAL_Delay(1); } for(int j=7100;j>0;j--) { __HAL_TIM_SET_COMPARE(&htim1,TIM_CHANNEL_1,j); HAL_Delay(1); } } /* USER CODE END 3 */

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
第二步:用编码器测出小车的速度
先看原理图
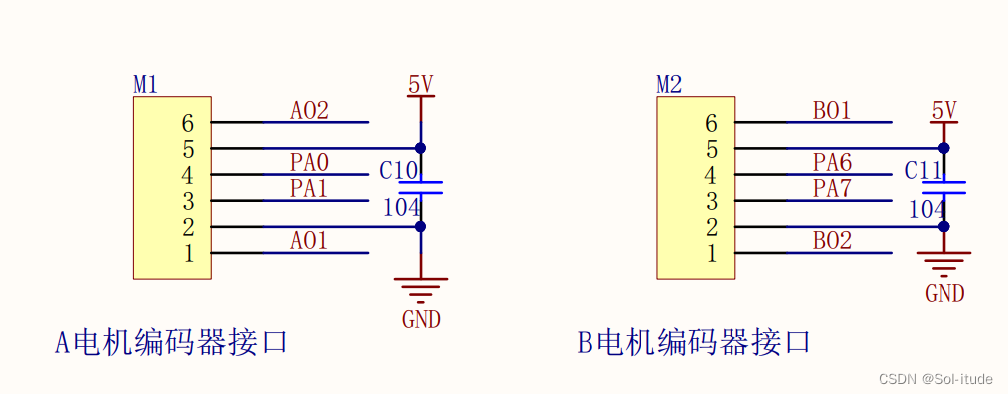
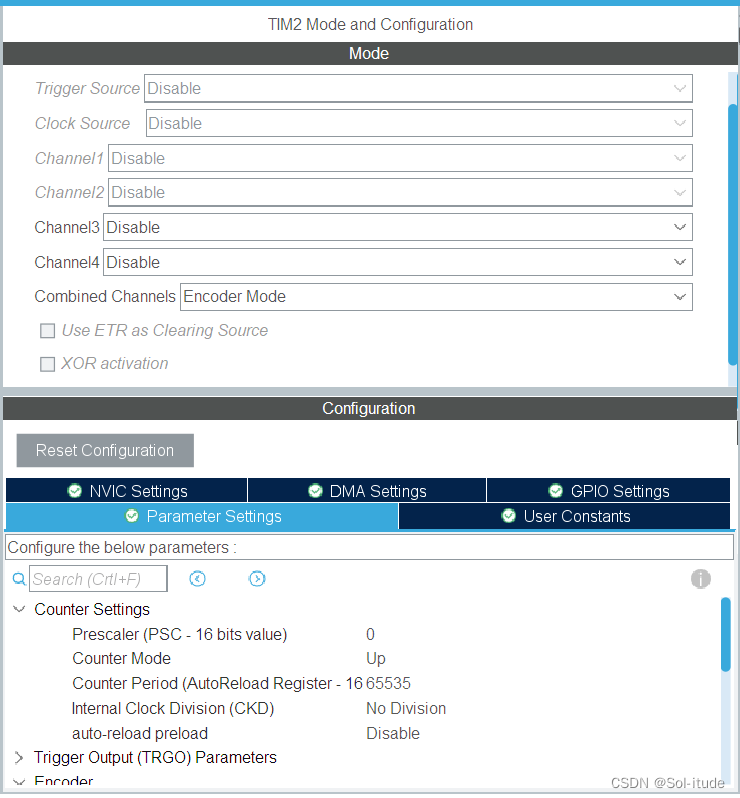
PA0和PA1,PA6和PA7分别是小车的编码器引脚,所以我们在cunbe中将这四个引脚设置为Encoder模式
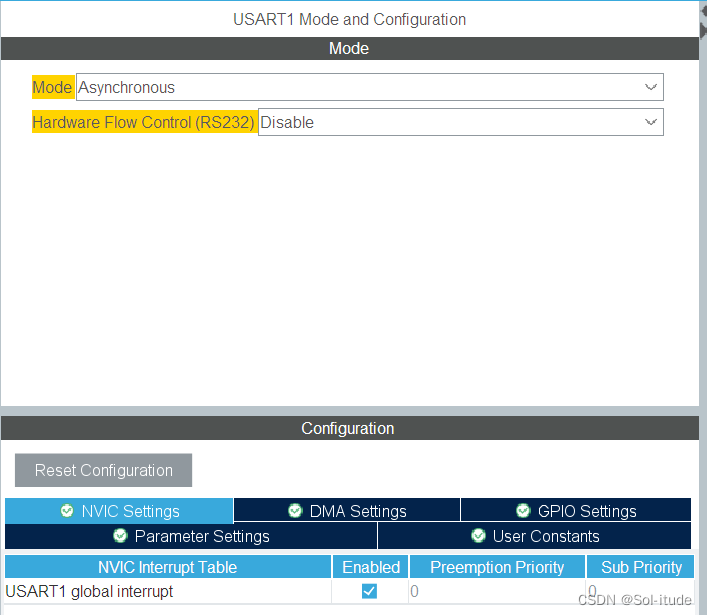
在cube中设置好编码器之后,我们再设置好串口,异步通信,再打开中断
首先开启编码器
void Encoder_Start(void) //启动两个编码器. 而编码器初始化HAL_TIM_Encoder_Init()和HAL_TIM_Encoder_MspInit()在main()函数中调用的MX_TIM2_Init()中。
{
__HAL_TIM_SET_COUNTER(&htim2,0); //用带参宏设置编码器的初始值为0(涉及正反转的需要)
__HAL_TIM_SET_COUNTER(&htim3,0);
HAL_TIM_Encoder_Start_IT(&htim2,TIM_CHANNEL_ALL); //开启编码器的中断模式,两个定时器通道TI1和TI2是每个编码器的两个信号采集通道.
HAL_TIM_Encoder_Start_IT(&htim3,TIM_CHANNEL_ALL);
HAL_TIM_Encoder_Start(&htim2,TIM_CHANNEL_ALL); //开启两个编码器
HAL_TIM_Encoder_Start(&htim3,TIM_CHANNEL_ALL);
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
读取编码器速度值
int Read_Speed(int TIMx) { int Encoder_Value = 0; switch(TIMx) { case 2: Encoder_Value =(short) __HAL_TIM_GET_COUNTER(&htim2); //保存编码器计数器的值 __HAL_TIM_SET_COUNTER(&htim2,0); //保存之后要清零,以便下次继续读取.另外每次清零后采样值减0,直接用单位时间的话就可以得出速度信息了.不要麻烦还要减去初值了. break; case 3: Encoder_Value =(short) __HAL_TIM_GET_COUNTER(&htim3); __HAL_TIM_SET_COUNTER(&htim3,0); break; default: Encoder_Value = 0; } return Encoder_Value; }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
这里是主函数,记得定义encoder2和encoder3
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
encoder2=Read_Speed(2);
encoder3=Read_Speed(3);
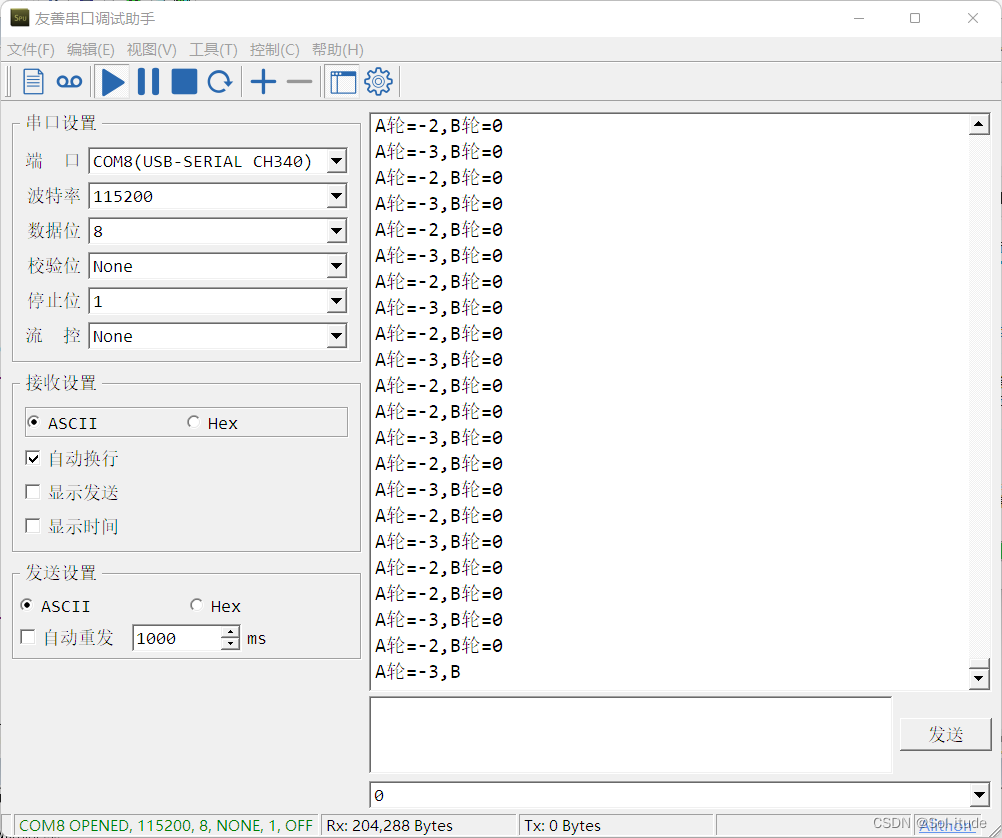
printf("A轮=%d,B轮=%d\n",encoder2,encoder3);
}
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
输出结果,因为是拿手转的,只能一只手转轮子:
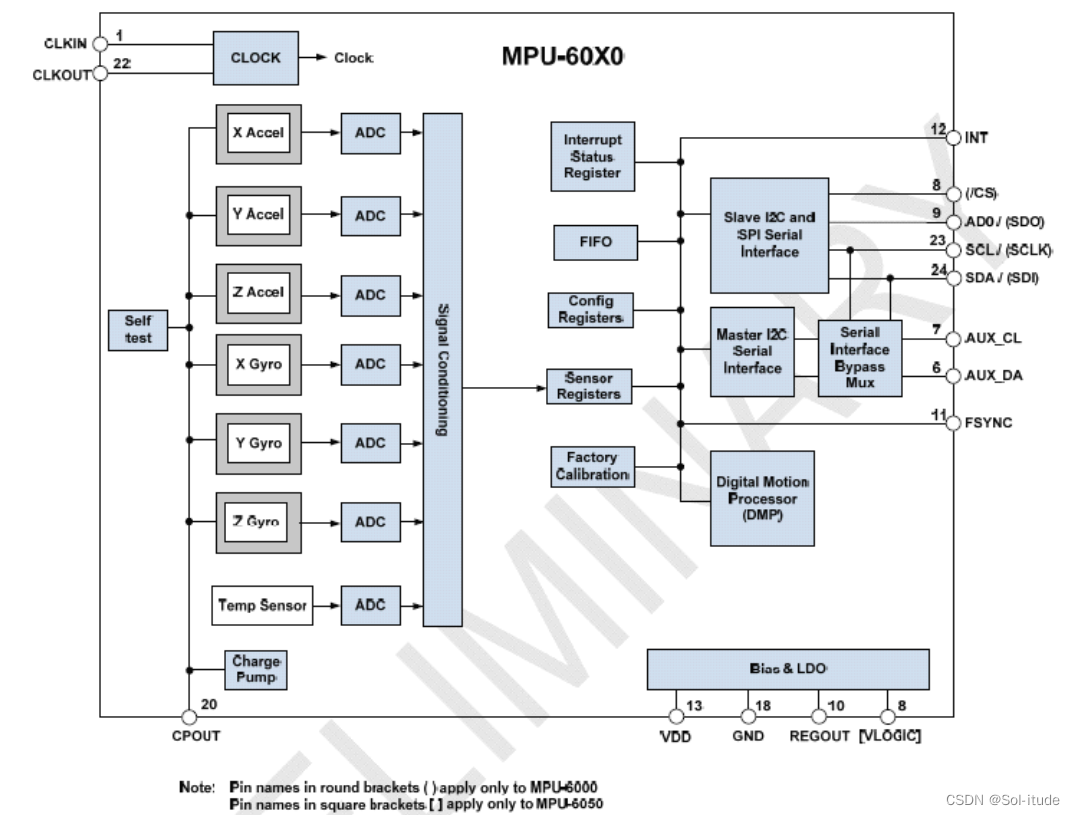
第三步:读取MPU6050的数据值
接下来就是最难的MPU6050了,我这里就不详细讲了,因为我自己对底层也不是很了解
左边我们可以看到XYZ的加速度,和XYZ陀螺仪数值,他们经过ADC转换后的数值通过IIC可以直接输出,但是数值就是纯数值,并不是角度值,然后就去DMP了,DMP在输出去FIMO,我理解就是,可以把MPU6050读取的这些东西,变成四元数,然后再通过IIC输出,就可以变成角度值了
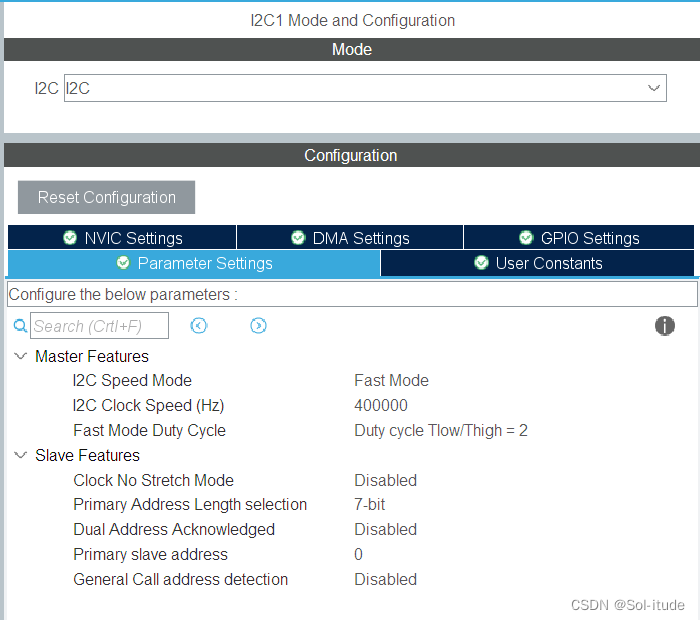
首先我们在CUBE中配置好IIC的SDA线和SCL线
MPU6050的读写程序我就不展示了,因为这些从网络上都能找到,我用的是正点原子的,需要注意的就是我这里用的是硬件的HAL库IIC,之前我们老师说硬件的IIC有点bug,让我们用软件的,但是我试了试硬件的IIC,发现也挺好用的,就不用软件的了
读取结果:
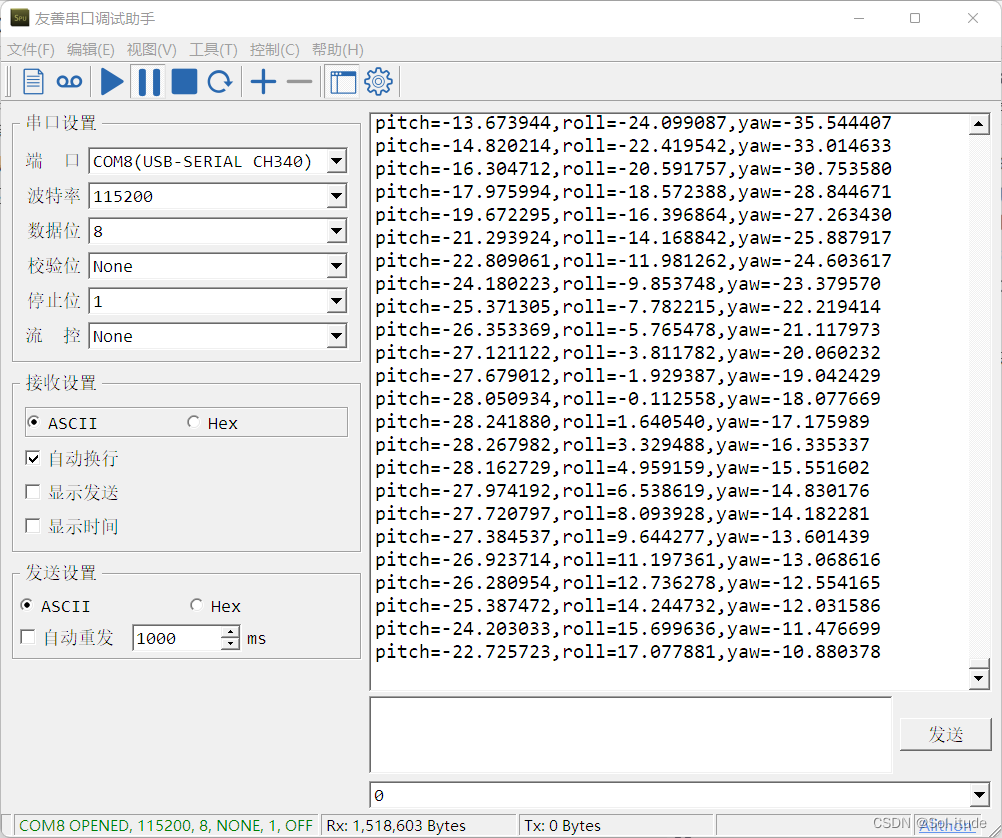
可以看到欧拉角的角度值,这样就可以去调整小车的姿态了
第四步:PID
朋友们不要着急,我在准备24考研,考完研一定填坑!
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/羊村懒王/article/detail/401653
推荐阅读
相关标签

