
- 1大模型学习路线与建议_大模型学习路径
- 2AI智能视频监控报警系统助力司机行驶安全
- 3推荐3款手机远程控制电脑的软件 专业 好用 免费_手机远程控制电脑软件哪个好
- 42022新版本的IDEA右键没有Git选项_idea2023 git菜单不见了
- 5matplotlib:TypeError: list indices must be integers or slices, not numpy.float64
- 6Stable Diffusion 学习(一)_bv1us4y117rg
- 7数据结构和算法分析之排序篇--归并排序(Merge Sort)和常用排序算法时间复杂度比较(附赠记忆方法)_归并排序实现与时间复杂度分析
- 8“释放你内心的艺术家:用我们的革命性API接口探索绘画世界“(免费API绘画接口)
- 9十大排序算法(附动态图解)- Java版_算法动态图解
- 10IntelliJ IDEA 不显示Git的解决办法_idea不显示git
四元数与欧拉角的转换关系_四元数和欧拉角的关系
赞
踩
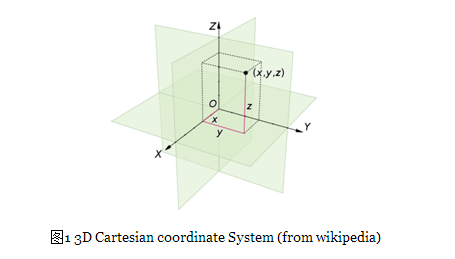
在3D图形学中,最常用的旋转表示方法便是四元数和欧拉角,比起矩阵来具有节省存储空间和方便插值的优点。本文主要归纳了两种表达方式的转换,计算公式采用3D笛卡尔坐标系:
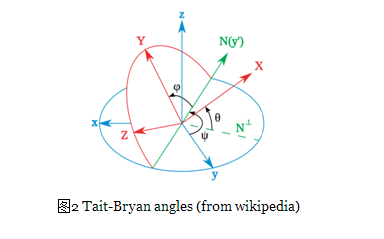
定义 分别为绕Z轴、Y轴、X轴的旋转角度,如果用Tait-Bryan angle表示,分别为Yaw、Pitch、Roll。
分别为绕Z轴、Y轴、X轴的旋转角度,如果用Tait-Bryan angle表示,分别为Yaw、Pitch、Roll。
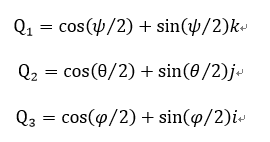
一、四元数的定义
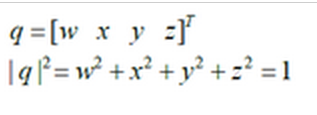
通过旋转轴和绕该轴旋转的角度可以构造一个四元数:
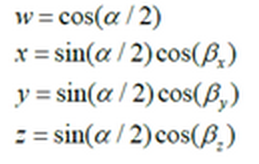
其中 是绕旋转轴旋转的角度,
是绕旋转轴旋转的角度, 为旋转轴在x,y,z方向的分量(由此确定了旋转轴)。
为旋转轴在x,y,z方向的分量(由此确定了旋转轴)。
利用欧拉角也可以实现一个物体在空间的旋转,它按照既定的顺序,如依次绕z,y,x分别旋转一个固定角度,使用roll,yaw ,pitch分别表示物体绕,x,y,z的旋转角度,记为 ,可以利用三个四元数依次表示这三次旋转,即:
,可以利用三个四元数依次表示这三次旋转,即:
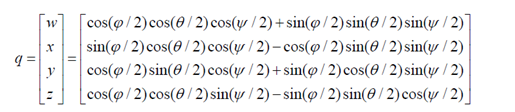
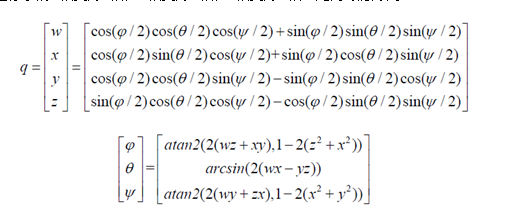
二、欧拉角到四元数的转换
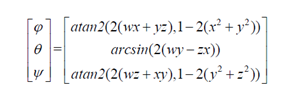
三、四元数到欧拉角的转换
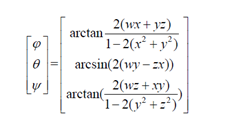
arctan和arcsin的结果是 ,这并不能覆盖所有朝向(对于
,这并不能覆盖所有朝向(对于 角
角 的取值范围已经满足),因此需要用atan2来代替arctan。
的取值范围已经满足),因此需要用atan2来代替arctan。
四、在其他坐标系下使用
在其他坐标系下,需根据坐标轴的定义,调整一下以上公式。如在Direct3D中,笛卡尔坐标系的X轴变为Z轴,Y轴变为X轴,Z轴变为Y轴(无需考虑方向)。
五、示例代码
http://www.cppblog.com/Files/heath/Euler2Quaternion.rar
Demo渲染两个模型,左边使用欧拉角,右边使用四元数,方向键Up、Left、Right旋转模型。
六、参考文献
https://en.wikipedia.org/wiki/Conversion_between_quaternions_and_Euler_angles
http://baike.baidu.com/link?url=NA09CdOpOe2uHUsSaj3w9Io2YD1MLK3ir4OFD25XxttgyMoMTcyvcfXh8K6pJNfptQYo6hQ2CMWmu-zxAeZnFq

