
- 1最新2023基于微信小程序的在线考试系统+后台管理系统(SSM+mysql)-JAVA.VUE(毕业设计+论文+开题报告+运行)_基于微信小程序在线考试系统的设计与实现的开题报告的图
- 2使用自带方法或web3js或ethersjs三种方式实现转账、查余额等原生币_ethers.js usdt转账
- 3SSL/VPN远程接入技术架构_proxyium是什么
- 4Html监电脑锁屏,使用电脑自带的锁屏功能实现电脑快速锁屏
- 53分钟,学会一个测试员必懂 Lambda 小知识!
- 6【重大更新】DevExpress v16.2新版亮点(WPF篇)_devexpress.v16.2
- 7fatal: bad numeric config value '5242880000' for 'http.postbuffer': out of range
- 8在城市与自然中穿行:探索自然的全新方式,健康、环保、快乐的生活方式
- 9华为OD机试 - 跳格子3 - 动态规划(Java 2024 C卷 200分)_跳格子 动态规划
- 10一、OpenMIPS指令集CPU的ori指令的实现
笔记-模拟舵机:基于STM32F103ZET的SG90舵机控制_sg90舵机是模拟还是数字舵机
赞
踩
写在前面:笔者是一名小白,如有错误,还请及时指正。
1、舵机基本知识
1、SG90舵机是一个模拟舵机,而非数字舵机,这两者的区别是这样,数字舵机只要给一个PWM信号即可,这个信号是目的地的位置,舵机会自动旋转到这个位置,而模拟舵机需要一直给予目的角度的PWM信号。由于舵机需要的PWM信号实际就是一个方波,所以模拟舵机就是需要不断的重复发一样的方波,直到舵机旋转到指定 的位置,并且如果需要锁定在这个位置,那么还需继续给予这个方波。
2、厂家技术数据
尺寸:21.5mmX11.8mmX22.7mm
重量:9克
无负载速度:0.12秒/60度(4.8V)
堵转扭矩:1.2-1.4公斤/厘米(4.8V)
使用温度:-30~~+60摄氏度
死区设定:7微秒
工作电压:4.8V-6V
3、PWM控制信号的要求
频率:50HZ
占空比:周期为20ms,根据不同的脉冲宽度(占空比)舵机会指定转到不同的角度。
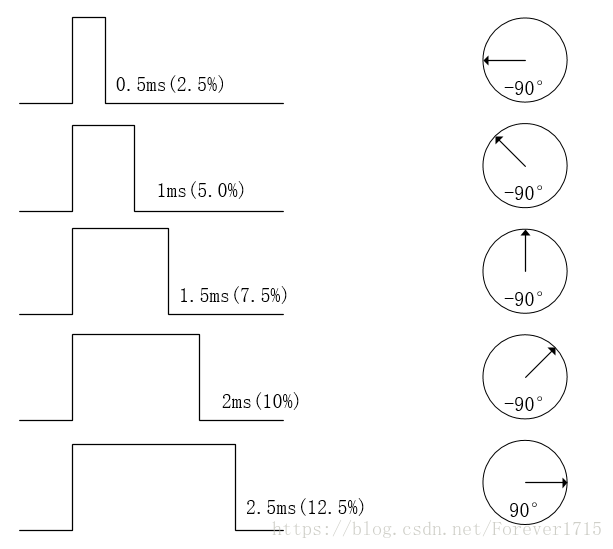
图稍微有点错误:圆圈内分别时-90°,-45°,0°,45°,90°
4、程序
单片机:STM32F103ZET(144引脚)
时钟选择:TIM2、CH3(重映射到PB10)
//==============================================================
//功能描述:Timer2 Channel3初始化,PWM模式
//参数://计数器TOP值,预分频 (ARR,PSC)
//返回:无
//==============================================================
void TIM2_PWM_Init(u16 period, u16 prescaler) //计数器TOP值,预分频 (ARR,PSC)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitTypeStruct;
TIM_OCInitTypeDef TIM_OCInitTypeStruct;
//部分重映射
GPIO_PinRemapConfig(GPIO_PartialRemap2_TIM2,ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); //使能定时器5时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);
//使能端口PB10
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE); //GPIOB PB10
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_10MHz;
GPIO_Init(GPIOB,&GPIO_InitStructure);
//初始化TIM2
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);//TIM2时钟使能
TIM_TimeBaseInitTypeStruct.TIM_Period = period;
TIM_TimeBaseInitTypeStruct.TIM_Prescaler = prescaler;
TIM_TimeBaseInitTypeStruct.TIM_CounterMode = TIM_CounterMode_Up; //上行计数
TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitTypeStruct); //TIM2初始化
//初始化TIM2 Channel3 PWM2
TIM_OCInitTypeStruct.TIM_OCMode = TIM_OCMode_PWM2; //CNT>CCR有效
TIM_OCInitTypeStruct.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitTypeStruct.TIM_OCPolarity = TIM_OCPolarity_Low; //输出极性低电平
TIM_OC3Init(TIM2,&TIM_OCInitTypeStruct);
//使能TIM2 Channel3预装载寄存器
TIM_OC3PreloadConfig(TIM2,TIM_OCPreload_Enable);
TIM_Cmd(TIM2,ENABLE);
}int main()
{
TIM2_PWM_Init(39999,35); //使用定时器2的通道3,PB10
TIM_SetCompare3(TIM2,3000);//初始化时旋转角度为0
while(1) ;
}
舵机基本知识参考文章:http://www.51hei.com/bbs/dpj-78449-1.html
//转载请注明出处

