
热门标签
热门文章
- 1技术前沿 |【SIMD并行计算与分布式算法:前沿技术的深度解析】
- 2AI学习手册_al入门知识库
- 3Java 002:发邮件,及NoSuchAlgorithmException报错解决办法_java.security.nosuchalgorithmexception: suntls12rs
- 4IDEA-SpringBoot项目yml配置文件不自动提示解决办法_idea yml文件没有提示·
- 5Rocky Linux 9.3 安装 MinIO 最新版本 (超级详细版本)_minio最新版本
- 6libmodbus交叉编译静态库_libmodbus怎么做成静态库
- 7docker安装postgres及开启postgres ssl require、命令行连接查看_docker search postgres
- 8动态规划-子数组1
- 9Python查看已安装包的版本号(多方法)_查看安装python版本
- 10【AI从入门到入土系列教程】Ollama教程——入门篇:本地大型语言模型开发_node new ollama
当前位置: article > 正文
2024新算法爱情进化算法(LEA)和经典灰狼优化器(GWO)进行无人机三维路径规划设计实验
作者:羊村懒王 | 2024-05-01 03:27:16
赞
踩
2024新算法爱情进化算法(LEA)和经典灰狼优化器(GWO)进行无人机三维路径规划设计实验
简介:
2024新算法爱情进化算法(LEA)和经典灰狼优化器(GWO)进行无人机三维路径规划设计实验。
无人机三维路径规划的重要意义在于确保飞行安全、优化飞行路线以节省时间和能源消耗,并使无人机能够适应复杂环境,实现特定任务。群体智能优化算法在无人机三维路径规划中扮演关键角色,其全局搜索能力允许同时考虑多个解决方案,避障优化确保路径安全,自适应性适应不同飞行任务需求,并行搜索加快最优解寻找速度。
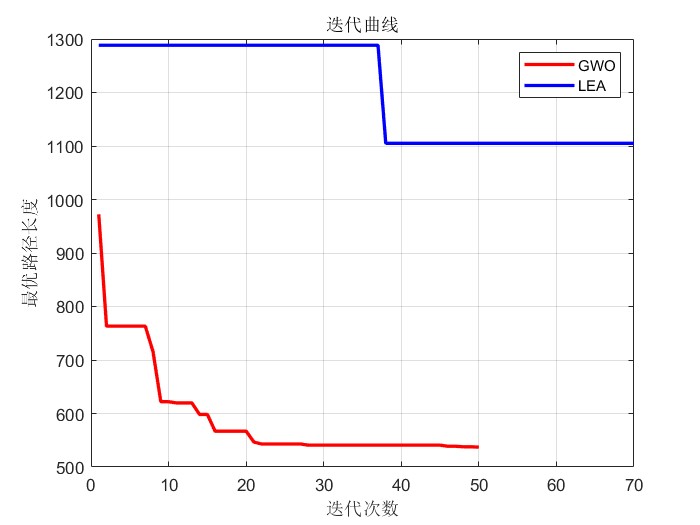
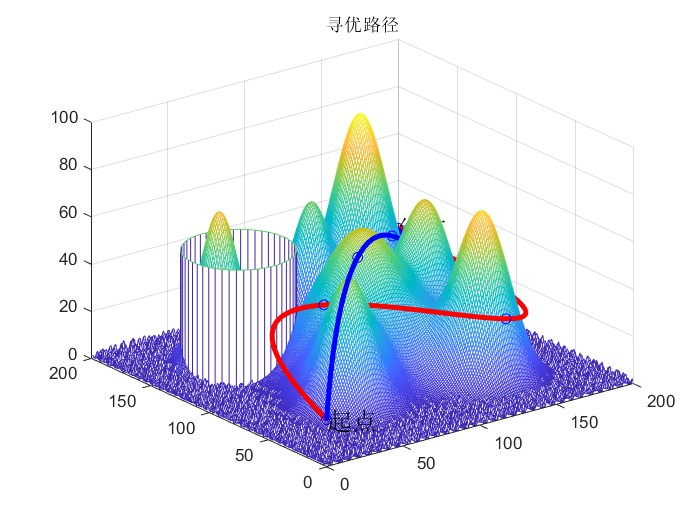
灰狼优化器(GWO)作为非常经典实用的群智能算法,在这里我们将其与2024年最新提出的爱情进化算法(LEA)进行无人机三维路径规划比较,运行结果包括最优路径和收敛曲线的比较。并附带代码,供大家学习参考!
实验结果如下:
部分主函数代码如下:
- %%
- clc;
- clear;
- close all;
- %% 创建地图
- %地图的大小200*200
- MapSizeX = 200 ;
- MapSizeY = 200;
- %% 地形地图创建,地图详细参数,请去MapValueFunction.m里面设置
- x = 1:1:MapSizeX;
- y = 1:1:MapSizeY;
- for i = 1:MapSizeX
- for j = 1:MapSizeY
- Map(i,j) = MapValueFunction(i,j);
- end
- end
- global NodesNumber
- global startPoint
- global endPoint
- global ThreatAreaPostion
- global ThreatAreaRadius
-
- %% 威胁区域绘制
- %威胁区域中心坐标
- ThreatAreaPostion = [50,140];
- %威胁区域半径
- ThreatAreaRadius = 30;
- %将威胁区域叠加到图上
- figure
- mesh(Map);
- hold on;
- for i= 1:size(ThreatAreaRadius)
- [X,Y,Z] = cylinder(ThreatAreaRadius(i),50);
- X = X + ThreatAreaPostion(i,1);
- Y = Y + ThreatAreaPostion(i,2);
- Z(2,:) = Z(2,:) + 50;%威胁区域高度
- mesh(X,Y,Z)
- end

代码获取点击:
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/羊村懒王/article/detail/516762
推荐阅读
相关标签

