
热门标签
热门文章
- 1【AI的未来 - AI Agent系列】【MetaGPT】6. 用ActionNode重写技术文档助手
- 2LLM的理论古往今来(持续更新ing...)_domain specialization as the key to make large lan
- 3git 切换远程地址分支 推送到指定地址分支 版本回退_git 切换远程仓库
- 4使用Angular-cli搭建Angular开发环境_angular inlinestyle
- 5华为lab-rs-v1-1.2_链路聚合
- 6最新PyCharm安装详细教程及pycharm配置_pycharm安装教程_pycharm最新版本安装教程及首次使用说明
- 7NLP工具最新版Spacy及语言包en_core_web_sm下载安装指南_spacy下载
- 8代码随想录-二分查找题目分析
- 93月全国计算机等级考试报名时间,2022年3月计算机等级考试报名时间及考试时间通知_2022年3月份计算机二级是那版
- 10MySQL-第七讲:数据库编程_mysql编程
当前位置: article > 正文
Livox激光MID-360使用与fast-lio2激光SLAM建图_fastlio2安装
作者:羊村懒王 | 2024-05-02 09:56:53
赞
踩
fastlio2安装
1、Livox激光MID-360使用
mid-360激光雷达使用前首先需要安装 SDK2和 ROS2驱动。注意,一定要使用 SDK2和 ROS2驱动。
安装 SDK2比较简单,按照README可以顺利完成。
ROS2驱动部分:
1、:新建mid360驱动工程,livox_mid360_driver_ws,修改livox_ros_driver2/config/MID360_config.json文件内的参数中ip部分,cmd_data_ip改为192.168.1.50,下面的ip改为雷达的ip,192.168.1.1** 最后两位为雷达S/N码最后两位数字,否则只有livox/imu的数据发布 。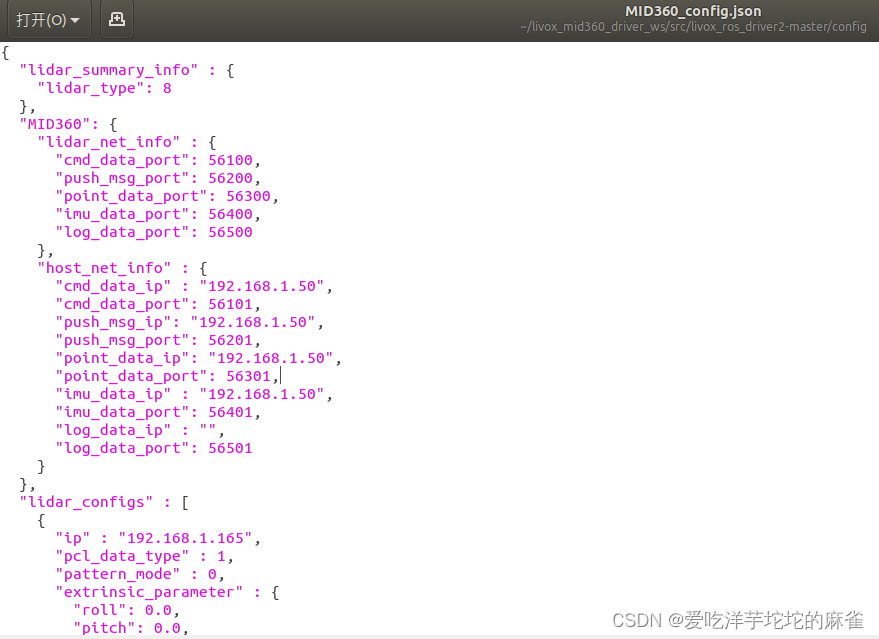 2、编译成功即可运行
2、编译成功即可运行
catkin_make
source ./devel/setup.bash
roslaunch livox_ros_driver2 msg_MID360.launch
- 1
- 2
- 3
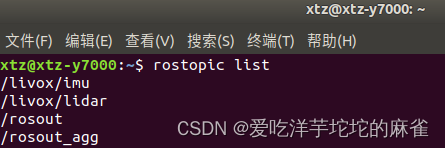
就可以正常发布雷达数据和激光数据了
2、使用FAST-LIO2运行mid360
安装ROS2驱动,需要把livox_ros_driver2放到既有的ros工程下。本次激光SLAM算法使用的是fast-lio2。具体流程:
1、下载fast-lio2:链接,新建ROS工程fast_lio2_ws。
2、安装方式参考:在Ubuntu18.04上安装与运行FASTER_LIO_SAM
3、运行fast_lio2_ws和livox_mid360_driver_ws
roslaunch fast_lio mapping_avia.launch
roslaunch livox_ros_driver2 msg_MID360.launch
- 1
- 2
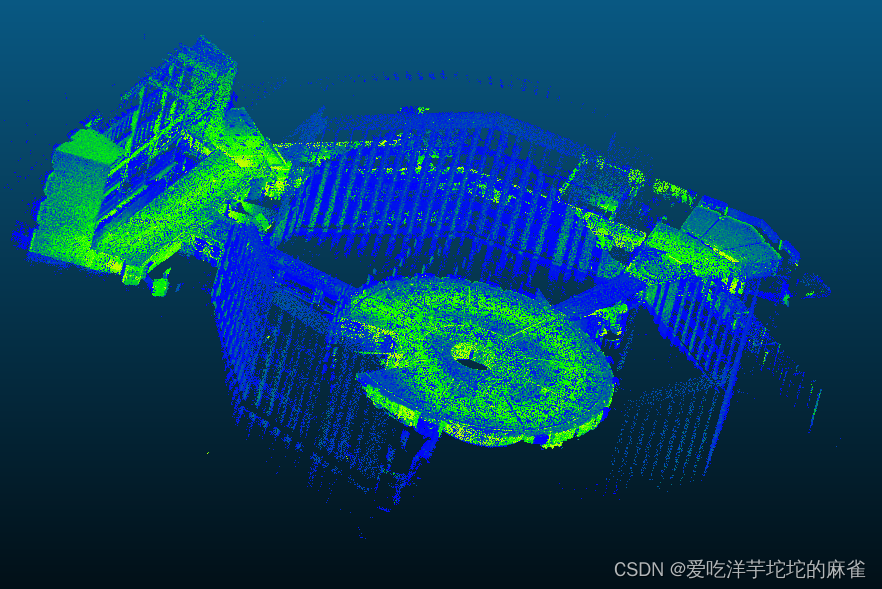
4、运行结果
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/羊村懒王/article/detail/523462
推荐阅读
相关标签

