
- 1智能加速:AI光模块助力数据中心迈向400G/800G超高速率的新境界
- 2Android Studio学习笔记(二)_android studio笔记(二)
- 3如何安装llvm的比较新的版本_lib库llvmjit.so 升级
- 4中文词向量:使用pytorch实现CBOW_怎样查看torch里有没有cbow
- 5通过 docker-compose 快速部署 DolphinScheduler 保姆级教程_dolphinscheduler docker
- 6java final 修饰变量_Java笔记:final修饰符
- 7Facebook广告投放技巧及思路、如何最大化发挥广告效益!_fb广告先投awareness获得数据再跟帖投转化
- 8安全计算环境(设备和技术注解)_当远程管理云计算平台中设备时,管理终端和云计算平台之间应建立双向身份验证机制
- 951单片机课程设计——基于单片机的AD模数转换设计_51单片机ad是什么
- 10飞桨自然语言处理框架 paddlenlp的 trainer_paddlenlp.trainer中train
动力学约束下的运动规划算法——Kinodynamic RRT*算法
赞
踩
 一、RRT * 算法回顾
一、RRT * 算法回顾 
为了更好的理解Kinodynamic RRT*算法,我们先来回顾一下RRT * 算法
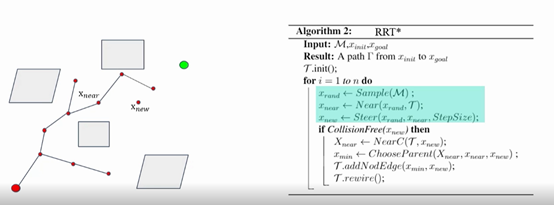
RRT * 先通过Sample函数随机选取一个点Xrand,然后通过Near函数找到当前树上距离Xrand最近的一个点Xnear,再通过Steer函数,沿着从Xnear到Xrand的方向走一步,步长为Stepsize,得到一个点Xnew

与RRT不同的是,在得到Xnew后不是直接将Xnew与Xnear连起来,而是通过NearC函数在以Xnew为圆心的,R为半径的圆的区域内去找到Xnew附近的一些节点,如上图中的Xnear、X1、X2
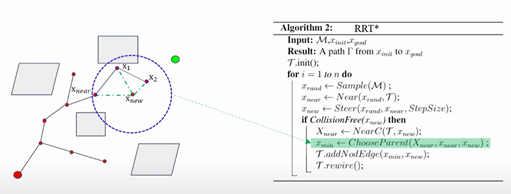
然后通过ChooseParent函数,将Xnew将这些点连接起来,分别计算从起点到Xnew的这三条路径哪一个花费是比较小的,这里的花费可以选为路径最短,也可以选择其他标准,上图中的例子中通过Xnear到达Xnew的那条路是最短的,这个时候Xnear就被选作了Xnew的父节点,如下图所示

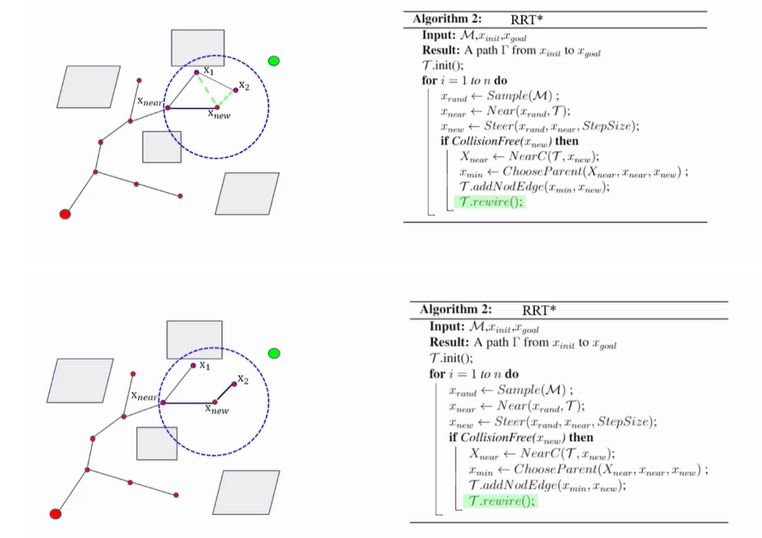
然后通过rewire函数去优化路径,将X1和X2分别与Xnew相连,去判断原来从起始点到X1的路更好,还是现在经过Xnew到X1的路更好,这里采用的衡量标准是路径长度,显然对于X1而言,是原来的路更短,不做处理,对于X2而言,显然是经过Xnew的路更短,因此将X2的父节点更改为Xnew,如下图所示:
除此之外,相对于RRT算法,RRT*在找到一条从起点到终点的路径后并没有停止,而是不断的优化,所以说RRT * 是一种渐进最优的算法,而RRT是一种非最优的算法
 二、Kinodynamic RRT*算法
二、Kinodynamic RRT*算法 
基于上面对RRT * 算法的回顾,接下来我们来看一下Kinodynamic RRT * 算法与传统的RRT * 算法有哪些不同

1、采样——Sample
传统的RRT * 算法在采样时在欧几里德空间中仅对位置进行采样,而Kinodynamic RRT * 算法是在全状态空间中采样。比如,针对位置、速度进行采样。

2、寻找RRT树上最"邻近"节点——Near
与传统的RRT * 算法不同,Kinodynamic RRT*算法在寻找最"邻近"节点时,不能仅考虑位置上最接近,而是需要考虑动力学约束,所以个人认为这里的最“邻近”节点,可以理解成到新节点连接代价值最小的节点。

上述过程中需要求解两个节点间的轨迹,即两点边界值问题BVP、或最优两点边界值问题OBVP。该问题可以通过前文介绍的庞特里亚金最小值原理进行求解,链接如下:
动力学约束下的运动规划算法——两点边界值最优控制问题 OBVP
提出Kinodynamic RRT*算法的作者在论文中给出了另一种求解该问题的方法,下面对该方法进行介绍。若不关心该方法,可略过该部分,直接跳到第3条
如果引入最优控制,我们可以定义如下的状态转移代价函数(通常采用二次型的时间-能量最优,即希望能量花费最小,并且耗费的时间要尽可能的小)
c
[
π
]
=
∫
0
τ
(
1
+
u
(
t
)
T
R
u
(
t
)
)
d
t
c[\pi]=\int_0^\tau\left(1+u(t)^TRu(t)\right)dt
c[π]=∫0τ(1+u(t)TRu(t))dt
如果从一种状态转移到另一种状态的成本很小,那么两种状态就很接近。(注意,如果反向转移,费用可能不同)
如果已知转移的到达时间τ和转移的控制策略u(t),就可以计算出转移的成本,这是经典的最优控制解(OBVP)
(1)情况1:固定的最终状态x1,固定的最终时间τ
此时,最优控制策略 u ∗ ( t ) u^{*}(t) u∗(t)如下所示:
u
∗
(
t
)
=
R
−
1
B
T
exp
[
A
T
(
τ
−
t
)
]
G
(
τ
)
−
1
[
x
1
−
x
ˉ
(
τ
)
]
.
u^*(t)=R^{-1}B^T\exp[A^T(\tau-t)]G(\tau)^{-1}[x_1-\bar{x}(\tau)].
u∗(t)=R−1BTexp[AT(τ−t)]G(τ)−1[x1−xˉ(τ)].
其中,
Copyright © 2003-2013 www.wpsshop.cn 版权所有,并保留所有权利。

