
- 1用 Kivy 和 Buildozer 生成 Android APK_buildozer打包apk
- 2转载--【兔子王赠书第13期】AI绘画实战:Midjourney从新手到高手
- 3头歌实训--机器学习(决策树)_决策树模型训练与预测头歌
- 4python 金融量化分析_金融量化分析 python
- 5实时数仓建设 环境配置 NIFI安装_apache nifi 建立数据仓库
- 6开源RAG,本地mac启动 dify源码服务_dify 本地开发调试
- 7开源与闭源:数字时代大模型之辩
- 8Golang实现根据文件后缀删除文件和递归删除文件
- 9销毁二叉树
- 10推荐项目:React CLI - 快速构建React应用的命令行工具
基于STM32两轮自平衡小车系统设计与控制_stm32做自动水平平衡平台
赞
踩
**单片机设计介绍,基于STM32两轮自平衡小车系统设计与控制
一 概要
基于STM32的两轮自平衡小车系统设计与控制概要主要涵盖了硬件设计、软件设计以及控制策略等方面。以下是对该系统的详细概述:
一、系统概述
两轮自平衡小车系统是一个典型的倒立摆模型,通过精确的控制策略保持小车的平衡状态。系统采用STM32微控制器作为核心,结合加速度传感器、陀螺仪等传感器实现小车的姿态检测和控制。通过调整电机的转速和转向,系统能够实时响应小车的运动状态变化,保持其稳定行驶。
二、硬件设计
STM32微控制器:作为系统的核心,负责接收传感器数据、处理数据并发送控制指令。STM32系列微控制器具有高性能、低功耗的特点,适用于需要实时响应和精确控制的自平衡小车系统。
传感器模块:包括加速度传感器和陀螺仪等,用于实时检测小车的姿态角(俯仰角和横滚角)和加速度信息。这些传感器数据将用于后续的控制算法计算。
电机驱动模块:负责接收STM32微控制器的指令,驱动小车的电机进行运动。电机驱动模块需要具备较高的响应速度和稳定性,以确保小车的平衡控制效果。
电源模块:为整个系统提供稳定的电源供应,确保各个组件的正常工作。
三、软件设计
传感器数据采集与处理:STM32微控制器通过I/O接口读取加速度传感器和陀螺仪的数据,并进行必要的滤波和校准处理,以提高数据的准确性和可靠性。
姿态解算与平衡控制:根据采集到的传感器数据,系统通过一定的算法(如卡尔曼滤波、互补滤波等)解算出小车的实时姿态角。然后,通过PID控制算法或其他先进的控制策略,计算出电机的控制量,以调整小车的姿态,保持其平衡状态。
电机控制指令发送:STM32微控制器根据计算出的电机控制量,通过PWM信号或其他方式驱动电机驱动模块,控制电机的转速和转向,实现小车的平衡控制。
四、控制策略
PID控制算法:PID控制算法是自平衡小车系统中常用的控制策略之一。通过调整PID控制器的参数(比例系数、积分系数和微分系数),可以实现对小车姿态的精确控制。
模糊控制算法:对于复杂的非线性系统,模糊控制算法可以提供一种有效的解决方案。通过定义模糊规则和隶属度函数,模糊控制器可以根据小车的实时状态进行智能决策,实现更加平稳和可靠的控制效果。
五、系统测试与优化
在完成系统设计与实现后,需要进行一系列测试来验证系统的性能和稳定性。通过调整控制算法参数、优化传感器数据处理方法等方式,可以进一步提高系统的平衡控制效果和响应速度。
综上所述,基于STM32的两轮自平衡小车系统设计与控制涉及到硬件设计、软件设计以及控制策略等多个方面。通过合理的设计和优化,可以实现小车的稳定行驶和精确控制,为相关领域的研究和应用提供有力支持。
二、功能设计
一、硬件介绍
主控芯片用的是100脚的STM32F103VET6,陀螺仪用的是MPU6050,电机驱动用的是TB6612,蓝牙是汇承的HC05邮票孔封装的,WIFI用的是济南有人科技的USR-WIFI232-S,小车底盘用的是平衡小车之家的某一款带编码器的(不是我买的,同学的),电池用的是一节7.2的镍镉电池,液晶用的是中景园电子1.3寸IIC接口的OLED,开关用的是三脚纽子开关,电池接口用的是T插,电阻电容这些用的基本上是0603封装,编码器5V降压用的是ASM1117-5.0,3.3V降压用的是SP6203,拨码开关用的是4P贴片式2.54mm角距的,按键是两脚贴片,microusb接口用的是5针 7.2四脚插板牛角母座,超声波是某宝上几块钱烂大街的那种,蜂鸣器是有源的,编码器是小车底盘自带的,电池电压检测是电阻分压之后通过电压跟随器接入MCU内部AD测量的。
- 1
二、主控板资源介绍
STM32F103VET6主控芯片;两个microusb口,第一个是MCU的串口1,可作为普通的串口收发数据,通过调节板上BOOT选项,也可将其作为ISP下载程序接口;第二个是SWD硬件仿真接口;蓝牙模块,与MCU的串口2连接;WIFI模块,与MCU的串口3相连;一块1.3寸IIC协议的液晶接口;超声波接口;双电机驱动;六轴陀螺仪;电池电压检测;4个用于调试的LED;4个独立式按键;一组4P的拨码开关;有源蜂鸣器;两个6P带AB相编码器的电机接口。
- 1
三、 软件设计
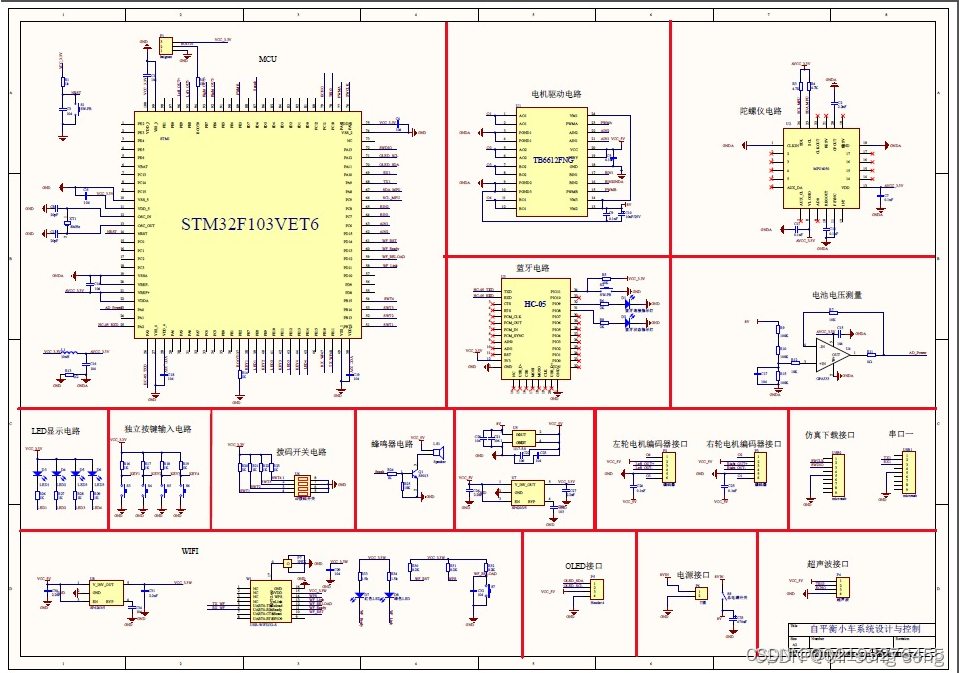
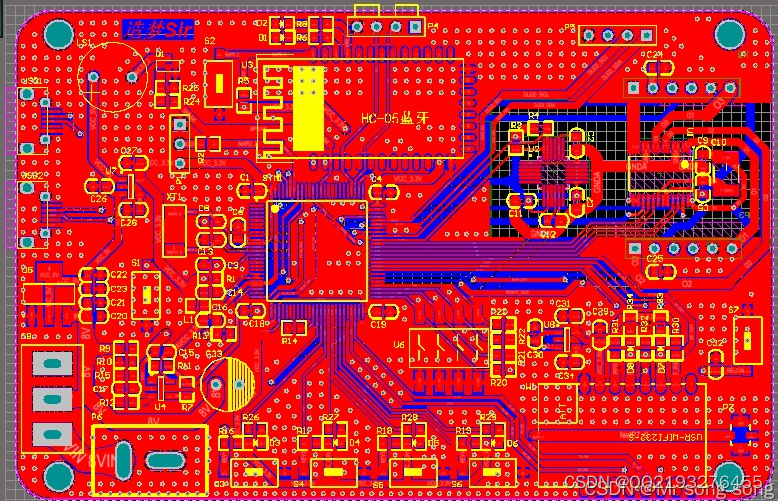
本系统原理图设计采用Altium Designer19,具体如图。在本科单片机设计中,设计电路使用的软件一般是Altium Designer或proteus,由于Altium Designer功能强大,可以设计硬件电路的原理图、PCB图,且界面简单,易操作,上手快。Altium Designer19是一款专业的整的端到端电子印刷电路板设计环境,用于电子印刷电路板设计。它结合了原理图设计、PCB设计、多种管理及仿真技术,能够很好的满足本次设计需求。
————————————————
仿真实现
本设计利用protues8.7软件实现仿真设计,具体如图。
Protues也是在单片机仿真设计中常用的设计软件之一,通过设计出硬件电路图,及写入驱动程序,就能在不实现硬件的情况进行电路调试。另外,protues还能实现PCB的设计,在仿真中也可以与KEIL实现联调,便于程序的调试,且支持多种平台,使用简单便捷。
————————————————
原理图


五、 程序
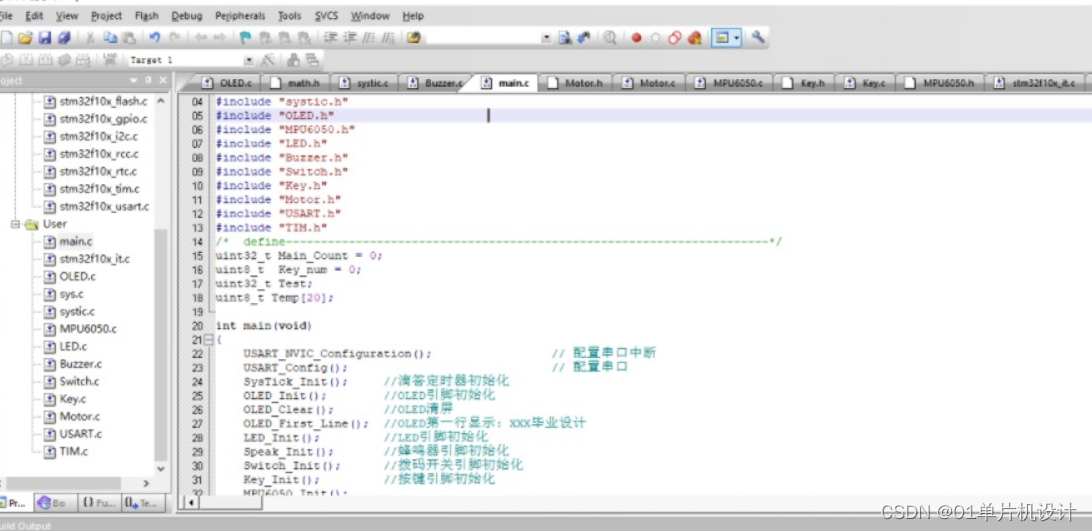
本设计利用KEIL5软件实现程序设计,具体如图。作为本科期间学习的第一门编程语言,C语言是我们最熟悉的编程语言之一。当然,由于其功能强大,C语言是当前世界上使用最广泛、最受欢迎的编程语言。在单片机设计中,C语言已经逐步完全取代汇编语言,因为相比于汇编语言,C语言编译与运行、调试十分方便,且可移植性高,可读性好,便于烧录与写入硬件系统,因此C语言被广泛应用在单片机设计中。keil软件由于其兼容单片机的设计,能够实现快速调试,并生成烧录文件,被广泛应用于C语言的编写和单片机的设计。
————————————————

六、 文章目录
目 录
摘 要 I
Abstract II
引 言 1
1 控制系统设计 2
1.1 主控系统方案设计 2
1.2 传感器方案设计 3
1.3 系统工作原理 5
2 硬件设计 6
2.1 主电路 6
2.1.1 单片机的选择 6
2.2 驱动电路 8
2.2.1 比较器的介绍 8
2.3放大电路 8
2.4最小系统 11
3 软件设计 13
3.1编程语言的选择 13
4 系统调试 16
4.1 系统硬件调试 16
4.2 系统软件调试 16
结 论 17
参考文献 18
附录1 总体原理图设计 20
附录2 源程序清单 21
致 谢 25

