
- 1关于ROS中对moveit和gazebo联动出现的问题进行解决_rosnoetic让moveit和gazebo联动
- 2数据结构-线性表_线性表的顺序存储结构和链式存储结构分别是
- 3了解哈希冲突_hash冲突产生的原因
- 4『App自动化测试之Appium应用篇』| uiautomator + accessibility_id定位方法完全使用攻略_appium中bounds [915,1941][1023,2049]右下角是那部分
- 5nlp的四大任务什么_nlp四大基本任务
- 6【动手学深度学习】使用块的网络(VGG)的研究详情
- 7人脸识别4-百度商用方案调研_人脸识别有源和无源的区别
- 8基于SpringBoot+Vue的酒店管理系统设计与实现_基于springboot+vue 酒店客
- 9MySQL8.0窗口函数_mysql窗口函数lead
- 10应用层协议:VPN协议
自动驾驶中的Scene, Situation和Scenario的定义与补充_scenario和scene的区别
赞
踩
**
自动驾驶中的Scene, Situation和Scenario的定义与补充
最近看到了一篇2015年Simon Ulbrich等人撰写的ITSC会议的论文,描述的是Scene,Situation和Scenario这三个单词在自动驾驶领域具体描述什么样的情境,一边看一边做一下笔记,与大家分享,水平有限,如果对于文章的理解有什么问题或者用词不恰当,希望大家能够批评指正,具体论文链接附下:
https://ieeexplore.ieee.org/document/7313256/citations#citations
大家在撰写英文论文的时候可以注意一下单词的使用。
自动驾驶汽车的功能系统架构
近25年以来,自动驾驶快速发展。到目前为止,车辆的硬件和软件相比以前都有了很大的变化,变得更加复杂,数量更多。为了便于管理,一些学者提出了下图所示的自动驾驶汽车的一个简单的功能系统架构。
上图中最左边指的是定位传感器,包括惯导等记录车辆的位置,依据这些传感器信息获得了三个层面的信息,分别是道路级,车道级以及特征级的车辆位置信息,道路级的应该是指车辆的经纬度,具体的就是在哪个国家的哪个城市哪条道路,车道级的应该是在这条道路上的哪个车道,哪个位置,而特征级的应该指的是车辆自身的姿态信息,如偏航角。此后,再结合路侧传感器和车辆自身的其他的传感器进行环境感知,可以对道路级、车道级的环境进行建模和获取车辆的速度、加速度等信息。在获取了道路级位置和环境后便可以对车辆进行地图上的导航,车道级的环境信息则可以帮助车辆进行路径规划与控制,车辆自身的特征信息则可以进行反馈控制,最后车辆将周围环境信息和自身状态信息通过V2X进行广播。
文章中我们比较关注的是车道级的场景,如图中标注黄色的那个部分。而图中的红色则标注了scene和situation的位置。从这张图中我们可以初步了解作者想传达的对于这两个术语的含义,Scene是从车道级的三维场景模型中直接获取的,是从一个很客观的角度去进行记录,没有主观视角。而situation则在路径规划与控制的模块中,夹杂在具体任务与轨迹目标之间,在一定程度上包含了主车的主观视角。
如上图所示,Scene是感知和路径规划&控制模块的中心接口,situation是路径规划&控制模块的中心数据容器。而Scenario则用来生成功能模块的测试用例,可以详细描述系统功能。
下面就是具体的分块介绍这三个术语的定义。
Scene
文中引用了许多学者对于Scene的定义与分析,这里我就不一一列举,仅仅引用部分文章定义,重点陈述作者的结论与定义,列出作者的一些重要的观点,如果对于我的陈述有疑惑的,可以具体去阅读这篇文献,有什么问题也请及时告知,互相学习。
Geyer等人认为,“Scene是由周围的静态环境、动态元素和可选的驾驶指令构成的,并且是从一个Scene的结束或者一个预先设定的Scene结束后开始的”,即Scene是一个动态过程,需要持续一段时间。但是这种定义就带了一些问题。首先是很难去确定下一个Scene什么时间开始,什么时间结束,需要持续多长时间,而且也没有明确一个预先设定的Scene与一般的Scene有什么区别。因此作者更倾向于将Scene理解为一个描述环境状态和元素自我状态的快照,这种状态同样是包括短暂的时间概念的,比如车辆正在超车或者被前车阻挡,这种状态也是Scene的内容。并且,作者建议将Geyer等人提出的定义中的可选的驾驶指令视作是Scene中的自我状态一个部分而不是目标。
作者对于Scene的定义的原文如下:“A scene describes a snapshot of the environment including the scenery and dynamic elements, as well as all actors’ and observers’ self-representations, and the relationships among those entities. Only a scene representation in a simulated world can be all-encompassing (objective scene, ground truth). In the real world it is incomplete, incorrect, uncertain, and from one or several observers’ points of view (subjective scene).”
Scene是周围环境的快照,包括场景静态元素(风景)、动态元素、场景参与者和观察者的自我状态表示以及所有元素之间的关系。只有在仿真中能够客观的准确的获取Scene的全部信息,而在真实世界中采集数据生成的Scene是从单个或多个视角获取的,并不完整,也并不准确。
Scene定义解释
场景观察者可以是Scene中的一个具有感知功能的元素或者是正在从整体上观察整个Scene的元素。Scene中的某一元素可以同时是场景参与者和观察者。动态元素是指正在移动或者有着移动能力的Scene中的元素,而静态元素(风景)则是包括了所有的地理空间静止元素。
在真实场景中,场景观察者总是从主观的视角去观察周边环境,即使多个场景观察者共享信息也不会生成对于环境描述的客观信息,而仅仅是多角度信息的融合。因此,场景中的参与者只能尽量使用感知模块去完全并且准确的感知周围环境信息,而无法做到对于Scene全部信息的获取。而在仿真世界中,从一个全知的视角去看,则可以获知一个Scene的全部信息。
在下文中我们可以看到,一系列的Scenes可以组成一个Scenario。
典型Scene实现
从定义可以看出,Scene包括全部的地理空间静止元素、动态元素、所有场景参与者和观察者的自我状态表示以及各个元素之间的联系。下图则揭示了Scene中所包含的内容并举出了一些例子。
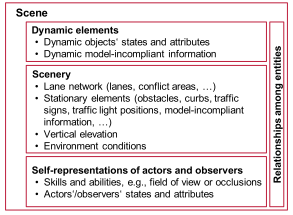
上图中列出了Scene所包含内容的一些细节,具体的关于图中元素的解释作者也做了一些声明,考虑到图片的内容并不难以理解,这里就不详细阐述了,有任何疑惑可以参见原文。
Situation
相比较于Scene, 关于Situation的定义则更多且更加不明确。Wershofen和Graefe等人认为,Situation是机器人在一个具体的环境中用于决策行为模型所需要的全部环境信息。在心理学中,Wirtz等人则将Situation定义为导致人类具体行为的全部环境信息。而Reichardt等人则认为Situation包括内部Situation和外部Situation。内部Situation包括描述自动驾驶汽车状态和用户输入信息,外部Situation包括描述道路、障碍物和交通信息的周围环境信息。Kruger等人则认为可以将Situation视作拓展的系统状态,在Situation中的各个元素不仅仅只是一个物体,还包括它的行为和其他可能的行为。
Pellkofer将Situation定义为所有影响行为决策的相关方面。影响行为决策的包括当前Scene、意图、当前Scene中的所有对象的行为(包括主车)以及主车的驾驶能力(这代表了主车可能采取决策范围)。文章作者则是将主车的驾驶能力作为决策过程的一种输入来推导决策范围。
Mock-Hecker等人则认为Situation是某个时间点上的交通世界的一部分。它包含了交通参与者的当前行为以及未来的行驶轨迹。对Mock-Hecker来说,Situation不仅仅代表了当前的交通状况还包括了其可能的未来发展。
在技术上使用Situation的一个重要方面是它的适应性。正如对Scene定义中所作的那样,文章作者认为可以将Situation视为整个决策环境的一个快照。决策环境则是指在特定环境下机器人(或者环境参与者)选择合适行为模式所需要的全部环境信息。
对于Situation进行定义的另一个挑战是功能系统架构(图1)中的"Situation assessment"或者"Situation analysis"。Situation analysis使用Situation作为输入,解释Situation或者Situation中的一个方面,Situation analysis的输出可以看作是对于原始Situation的一种扩展。,提供了更详细的信息,有学者也将其写为"Situation aspects"。可以将其理解为是将原始信号转换为人类理解的含义的过程。
Geyer等人认为Situation是通过一系列的标准及其对应的行为所定义的。在他们的Situation定义中,一个场景的结束是通过改变一个描述场景的标准来定义的。文章作者同意Geyer定义中关于“由于Scene中元素的行为不同,同一个Scene可以演变为多个Situation”的方面,但是不赞同Situation应该包含全部的Scene。Situation应当是基于具体任务目标及车辆驾驶能力对Scene信息的选择与补充。
Angenendt等人认为Situation不仅仅是交通Scene的快照,还应当包括交通参与者的行为以及非正式的行为规则,并使用behavior setting来表示交通参与者全部非正式行为规则。文章作为认为behavior setting应当作为元素目标和自身参数的相关信息。
文章作者对于 Situation的定义原文如下:“A situation is the entirety of circumstances, which are to be considered for the selection of an appropriate behavior pattern at a particular point of time. It entails all relevant conditions, options and determinants for behavior. A situation is derived from the scene by an information selection and augmentation process based on transient (e.g. mission-specific) as well as permanent goals and values. Hence, a situation is always subjective by representing an element’s point of view.”
Situation是在一个特定时间点选择合适的行为模式所需要的全部环境信息,其中包括了所有与行为相关的条件、选择和决定。Situation是基于短暂或永久目标以及车辆自身驾驶能力对于Scene的信息选择与补充。因此,Situation是从某一元素视角出发的主观描述。
Situation中还包括了Situation aspects。
Situation可以由Scene导出,Scene、Situation以及Goals&values的关系如下图所示:
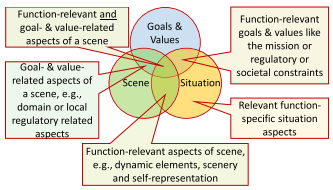
通过上文中文章作者对其他学者的观点的分析,可以很容易的理解作者对于Situation的定义。
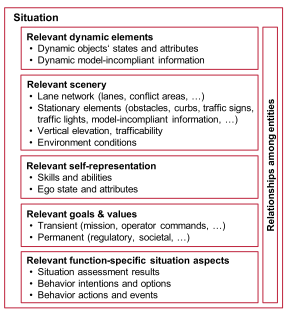
典型Situation实现
如下图为Situation应当包含的内容的一个例子,可以看出与Scene很相似。Situation与Scene的区别就在于只有根据与驾驶行为(主观)相关的信息会考虑进来。此外, Situation还包括了目标和驾驶能力,相关的Situation aspects这两个方面。
作者还以下图为例:
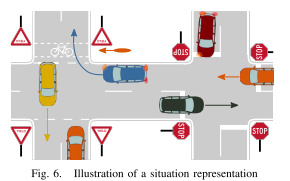
图中的蓝色车辆为主车,当前在路口直行时,人行道上的自行车就不纳入到Situation的范围,而如果蓝色的车需要进行右转,Situation就需要包括自行车。
Scenario
Scenario目前经常被使用在仿真,测试以及驾驶辅助系统的功能描述中。
作者对于Scenario的定义原文如下所示: “A scenario describes the temporal development between several scenes in a sequence of scenes. Every scenario starts with an initial scene. Actions&events as well as goals&values may be specified to characterize this temporal development in a scenario. Other than a scene, a scenario spans a certain amount of time.”
Scenario是连续Scenes的短暂发展。 每一个Scenario都由一个初始的Scene开始。 在这短暂的序列Scene中,车辆的驾驶行为以及运动目标可能是具体的. 相比于Scene, Scenario是一个确定的时间片段。
作者用下图很清晰的描述了测试用例,Scene和Scenario之间的关系:
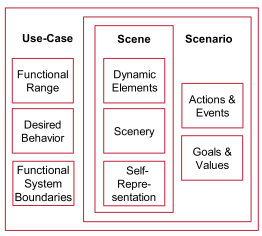
典型Scenario实现
很清晰的,Scenario可以看作是一部动作小短片一样,由车辆的驾驶行为和活动将一系列的Scene链接起来,下图为Scenario的一个例子。

总结
文章很清晰的定义了Scene,Scenario和 Situation之间的关系,Scene可以看作是原始数据采集的全部场景信息,而Situation可以看作是从Scene中抽取的对于主车驾驶行为相关的场景,而Scenario则通常用于车辆的功能验证,由一连串的Scene组成。

