
- 1六种常见的排序算法
- 2大厂频繁联手,NFT与GameFi的融合能带来哪些新叙事?_gamefi、nft
- 3Android开发之 Preference首选项_preferencecategory
- 4springboot vue elementui 宿舍管理系统源码_vue毕设学生宿舍管理系统源码
- 5各种工具的快捷键或命令_sudo service dbus restart
- 6itheima = tfy
- 7el-table 取消鼠标移入时变色
- 8WebRTC开源项目-分享搭建AppRTC过程_基于webrtc的开源项目
- 9redhat6.6 64位系统安装yum_redhat系统yum安装java64位
- 10vba:end属性_vba end
自动驾驶路侧感知定位技术条件_抱杆箱安装高度
赞
踩
自动驾驶路侧感知定位技术条件 团体标准 T/CASE 2021
1 范围
本标准规定了服务于车路协同自动驾驶的路侧感知定位系统组成、应用场景、系统功能要求及 设备设施技术要求。 本标准适用于自动驾驶路侧感知定位系统的研发设计、建设部署和应用服务。
2 规范性引用文件
下列文件对于本文件的应用是必不可少的。凡是注日期的引用文件,仅所注日期的版本适用于 本文件。凡是不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
GB/T 24726 交通信息采集.视频车辆检测器 标准
GB/T 28181 公共安全视频监控联网系统信息传输、交换、控制技术要求
GB/T 28649 机动车号牌自动识别系统
GB/T 29100 道路交通信息服务 交通事件分类与编码
GB/T 31024.1 合租式智能运输系统 专用短程通信 第1部分:总体技术要求
GB/T 33171 城市交通运行状况评价规范
JT/T 604 汽车号牌视频自动识别系统
GA 36 中华人民共和国机动车号牌
GA 802 道路交通管理 机动车类型
GA/T 833 机动车号牌图像自动识别技术规范
GA/T 1127 安全防范视频监控摄像机通用技术要求
T/CSAE 53 合作式智能运输系统 车用通信系统应用层及应用数据交互标准
T/CSAE 156 自主代客泊车系统总体技术要求
T/CSAE 157 合作式智能运输系统 车用通信系统应用层及应用数据交互标准 第二阶段
T/CSAE 158 基于车路协同的高等级自动驾驶数据交互内容
T/CSAE 185 自动驾驶地图采集要素模型与交换格式
3 术语定义和缩略语
3.1 术语和定义
下列术语和定义适用于本文件。
3.1.1 合作式智能运输系统 cooperative ITS
通过人、车、路信息交互,实现车辆和基础设施之间、车辆与车辆、车辆与人之间的智能协同 与配合的一种智能运输系统体系。 [来源GB/T 31024.1 2.1]
3.1.2 路侧感知定位系统 roadside sensing and positioning system
部署在路侧的由计算设备、感知设备及相关附属设备所组成的用于对道路交通参与者、交通事 件和交通运行状况等进行实时检测识别和准确定位的系统。
3.1.3 交通事件 traffic incident
由于人、车辆、设施、环境之间的不协调导致正常交通秩序的突发性混乱事件。
3.1.4 准确率 precision
正确识别的目标数或事件数与有效识别的目标总数或事件总数的百分比。
3.1.5 召回率 recall
正确识别的目标数或事件数与应被识别的目标数或事件数的百分比
3.1.6 事件漏报率 rate of failed detecting
系统在正常工作状态中,交通事件发生但未能检测并报警的次数占实际发生交通事件总次数的 百分比。
3.1.7 事件虚报数 quantity of false alarm
系统在正常工作状态中,统计时间内并无交通事件发生而系统出现虚报警的次数。
3.2 缩略语
下列缩略语适用于本文件。
AVP:自主代客泊车(Automated Valet Parking)
CGCS2000:2000国家大地坐标系(China Geodetic Coordinate System 2000)
CMOS:互补金属氧化物半导体(Complementary Metal Oxide Semiconductor)
DSRC:专用短程通信技术(Dedicated Short Range Communication)
GNSS:卫星导航定位系统(Global Navigation Satellite System)
GPS:全球定位系统(Global Positioning System)
ISAPI:服务应用程序接口(Internet Server Application Programming Interface)
LTE-V2X:基于LTE的车用无线通信技术(LTE Vehicle to Everything)
MEC:多接入边缘计算(Multiple-Access Edge Computing)
MQTT:消息队列遥测传输(Message Queuing Telemetry Transport)
MTBF:平均无故障工作时间(Mean Time Between Failure)
NTP:网络时间协议(Network Time Protocol)
OBU:车载单元(Onboard Unit)
PTP:高精度时间同步协议(Precise Time protocol)
SSM:感知共享消息(Sensor Sharing Message)
TCP:传输控制协议(Transmission Control Protocol)
UDP:用户数据报协议(User Datagram Protocol)
UTC:协调世界时(Coordinated Universal Time)
UTM:通用横轴墨卡托投影(Universal Transverse Mercator)
V2I: 车载单元与路侧单元通讯(Vehicle to Infrastructure)
V2P:车载单元与行人通讯(Vehicle to Pedestrian)
V2V: 车载单元之间通讯(Vehicle to Vehicle)
V2X: 车载单元与其他设备通讯(Vehicle to Everything)
4 路侧感知定位系统
4.1 总体架构
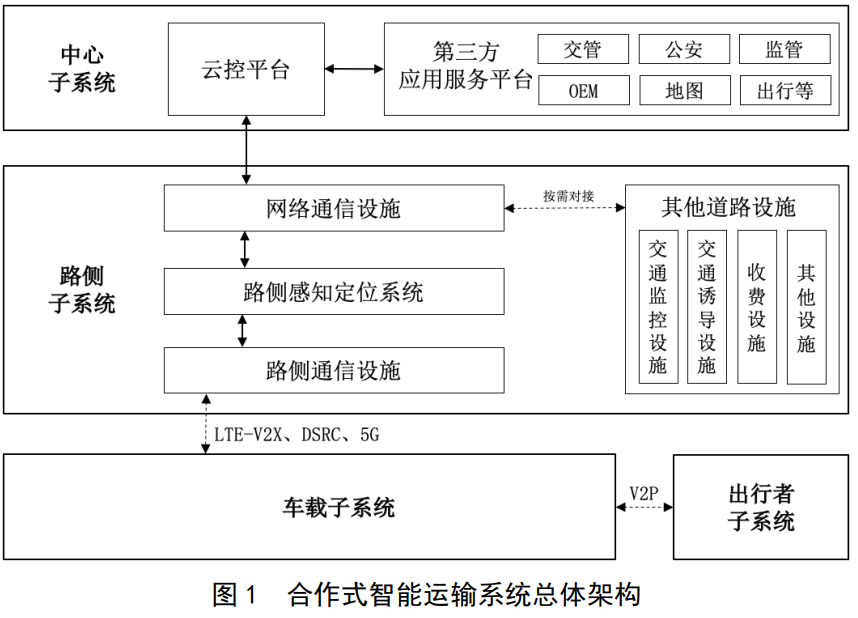
路侧感知定位系统可以对感知范围内的交通运行状况、交通参与者(包括但不限于机动车、非 机动车、行人等)与交通事件(超速、闯红灯、逆行、交通事故等)等进行感知识别和定位,并将 感知结果信息发送给周围车辆,接收到路侧信息的车辆可提前识别不在自身感知范围内的交通参与 者或道路异常状况,提前做出正确的驾驶决策,减少交通事故或二次伤害,提高行车安全和交通通 行效率。
路侧感知定位系统是合作式智能运输系统中路侧子系统的重要组成部分,其总体架构如下图1 所示,其中路侧子系统包括但不限于:
a) 路侧感知定位系统;
b) 路侧通信设施;
c) 网络通信设施;
d) 其他道路设施,如交通监控设施、交通诱导设施、收费设施等。
4.2 系统组成
4.2.1 路侧感知定位系统组成如下图 2 所示,包括以下几个主要部分:
a) 路侧计算设施:用于对路侧感知设备的原始感知数据或结果数据进行存储、融合处理分析, 得到较高精度的感知结果信息;
b) 路侧感知设备:用于对道路交通运行状况、交通参与者、交通事件等进行检测识别,包括 各类交通检测器,如感知摄像机、毫米波雷达、激光雷达等;
c) 其他附属设备:为路侧感知系统提供供电、供网、数据交换、时间同步、信息安全等支撑 服务的相关设备。
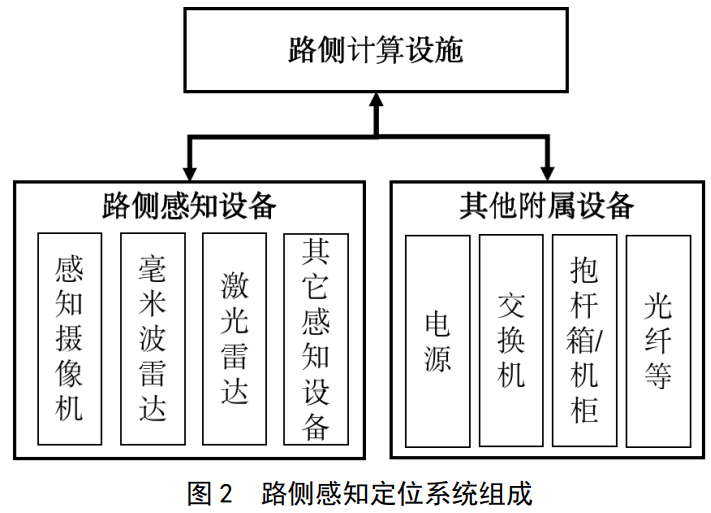
4.2.1 路侧计算设施可以是部署在路侧的单个计算单元,也可以是部署在路侧机房中的 MEC 设备。
4.2.2 路侧感知设备以感知摄像机为主,根据应用场景对检测准确率和定位精度的需要,可选配 毫米波雷达、激光雷达或其他传感器设备。
4.3 基本流程
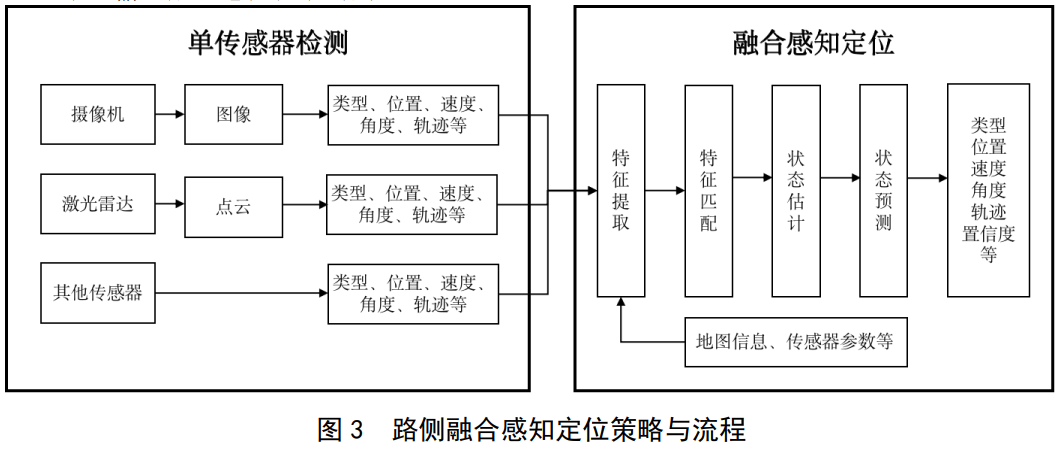
路侧感知定位系统进行融合感知与定位的基本流程如下图2所示,包括以下步骤:
a) 基于单个传感器的目标检测识别;
- 感知摄像机将原始感知数据发送到计算处理模块,计算处理模块基于视频图像数据进 行处理分析,得到感知结果信息;
- 激光雷达基于点云数据进行处理分析,得到感知结果信息,并发送到路侧计算设施;
- 其他感知设备同时对目标进行检测识别,并将感知结果信息发送到路侧计算设施。
b) 路侧计算设施对多传感器原始感知数据或结构化数据进行融合处理,得到融合后的感知定 位结果信息,具体步骤包括:
- 特征提取;
- 特征匹配;
- 状态估计;
- 状态预测(可选);
- 出融合感知定位结果。
5 应用场景与系统技术要求
5.1 应用场景概述
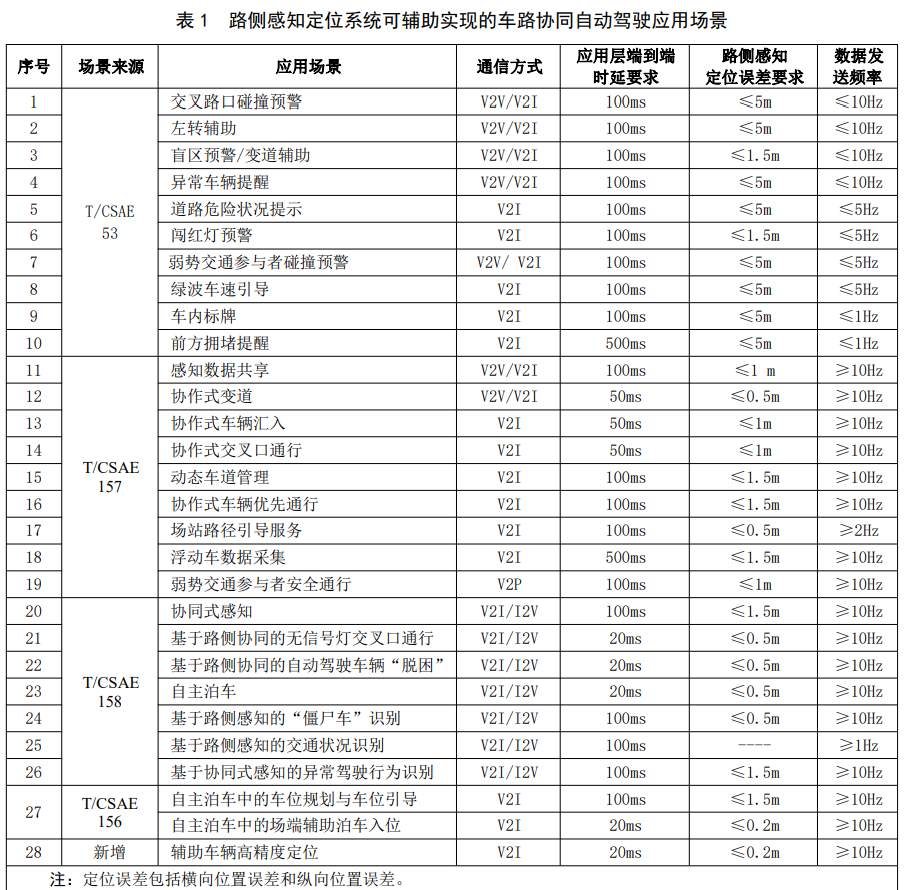
路侧感知定位系统可广泛应用于车路协同辅助驾驶或自动驾驶各类应用场景,下表1列出了 T/CSAE 53、T/CSAE 156、T/CSAE 157与T/CSAE 158等标准中需要路侧感知定位系统配合才能实现 的应用场景,并列出了对路侧感知定位系统的部分技术需求。
表1同时新增提出了辅助车辆高精度定位这一类应用场景,以辅助解决车辆在无GNSS、定位功 能失效等相关环境中的高精度定位问题,该场景的描述、原理和技术要求见本文件5.2节。
5.2 辅助车辆高精度定位应用场景
5.2.1 场景描述
自动驾驶车辆在复杂道路环境行驶时,由于以下原因可能存在自车定位失效风险:
——恶劣环境条件(如低温、高温、大风等),造成车端传感器损毁或失效;
——雨雪雾天气,影响或降低车端感知设备性能,影响自车感知识别准确率和定位精度;
——桥隧、山区、地下等无 GNSS 环境,车辆无法基于 GNSS 进行车辆定位;
——其他原因导致的车辆感知定位功能失效。
路侧感知系统可以对道路车辆进行实时、多特征识别与高精度定位,并通过路侧单元RSU将感 知定位结果信息发送到车辆OBU,车辆可将路侧的感知结果信息作为融合定位信息源之一,辅助车 辆实现高精度定位。
路侧感知定位系统既可以在车辆自身定位功能正常运行时为车辆提供定位冗余,也可以在车辆 自身定位功能故障失效情况下,提供可靠的定位输入信息。
5.2.2 场景原理
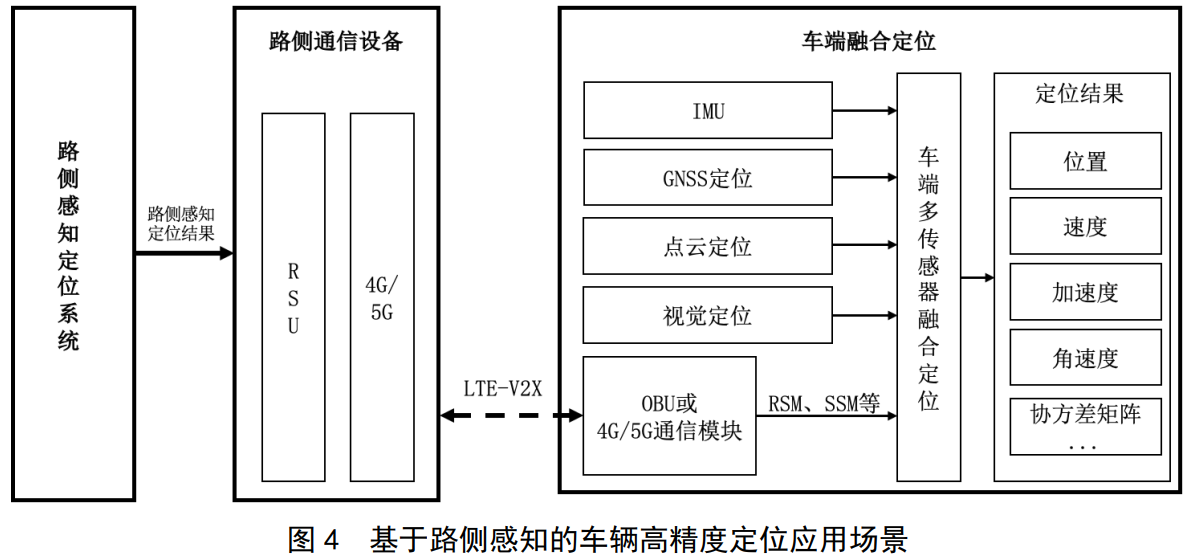
通过路侧感知定位系统辅助车辆进行定位的原理如下图4所示,分为以下几个步骤:
a) 路侧感知定位系统的多个感知设备可同时对车辆进行多特征检测识别(包括车辆属性特征、 车辆动态特征等);
b) 路侧计算设备对多个感知设备的原始感知数据或感知结果数据进行融合处理,感知得到较 高精度的车辆特征信息和位置信息;
c) 路侧感知定位系统根据 V2X 应用需求,将感知定位结果信息转换成相应格式的报文数据, 如基于 LTE-V2X 的 ASN.1 格式报文数据;
d) 路侧单元 RSU 将感知定位结果信息发送到车辆 OBU;
e) 车辆 OBU 接收路侧单元 RSU 报文信息,对报文数据进行解析处理,通过车辆特征信息匹配 (位置匹配、特征匹配等),得到本车的准确位置信息;
f) 车辆多传感器融合定位模块对车载多传感器感知定位信息和路侧感知定位信息进行融合 处理,得到融合后的感知定位结果,辅助车辆完成车辆高精度定位。
5.2.3 路侧感知定位技术要求
通过路侧感知定位辅助车辆进行高精度定位时,路侧感知定位系统应具备较高精度的感知识别 准确率和定位精度,满足本文件5.3节L4及以上高等级自动驾驶对路侧感知定位系统的技术要求。
5.2.4 V2X 通信技术要求
5.2.4.1 路侧单元RSU与OBU数据交互应满足以下要求:
a) 路侧 RSU 与车辆 OBU 之间以单播、组播或者广播方式进行信息交互,应用触发期间,周期 性发送消息;
b) 通信距离≥300m;
c) (应用触发期间)数据通信频率≥10Hz;
d) 应用层端到端时延≤20ms;
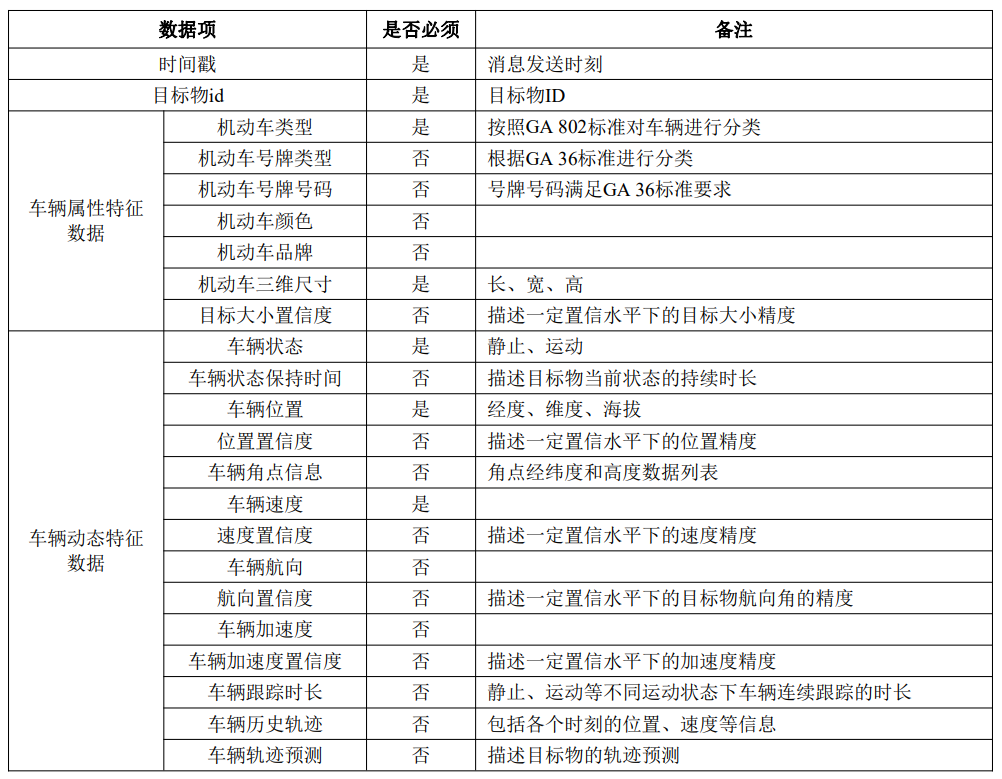
5.2.4.2 路侧单元RSU向OBU发送的数据内容见下表2,应用层数据集、数据帧和数据元素参见 T/CSAE T/CSAE 158标准SSM数据集。
表 2 路侧向 RSU 发送的感知定位结果数据内容
5.3 系统技术要求
5.3.1 交通参与者感知定位
5.3.1.1 类型识别
路侧感知定位系统可识别的交通参与者类型包括但不限于:
a) 机动车:如轿车、卡车、大巴车、紧急或特殊车辆等,机动车分类满足 GA 802 标准;
b) 非机动车:如自行车、摩托车、三轮车、自行车等;
c) 行人;
d) 遗撒或低矮障碍物:如锥筒、三角警示牌、动物、纸箱、轮胎等(可选);
e) 特殊目标:石墩、水马、立柱等(可选)。
5.3.1.2 特征识别
路侧感知定位系统应支持识别交通参与者的静态和动态特征信息,其中静态特征信息包括但不 限于:
a) 交通参与者类型;
b) 目标物大小:三维尺寸;
c) 目标物大小置信度(可选);
d) 参与者角点数据(可选)
e) 车牌(可选);
f) 颜色(可选);
g) 车辆品牌(可选);
h) 驾驶员信息(可选)。
可识别的动态特征信息包括但不限于:
a) 位置信息:经纬度、海拔;
b) 位置置信度(可选);
c) 速度;
d) 速度置信度(可选);
e) 四轴加速度(可选);
f) 加速度置信度(可选);
g) 航向角(可选);
h) 航向角置信度(可选);
i) 目标跟踪时长(可选);
j) 机动车历史轨迹(可选);
k) 机动车路径预测(可选)。
5.3.1.3 性能要求
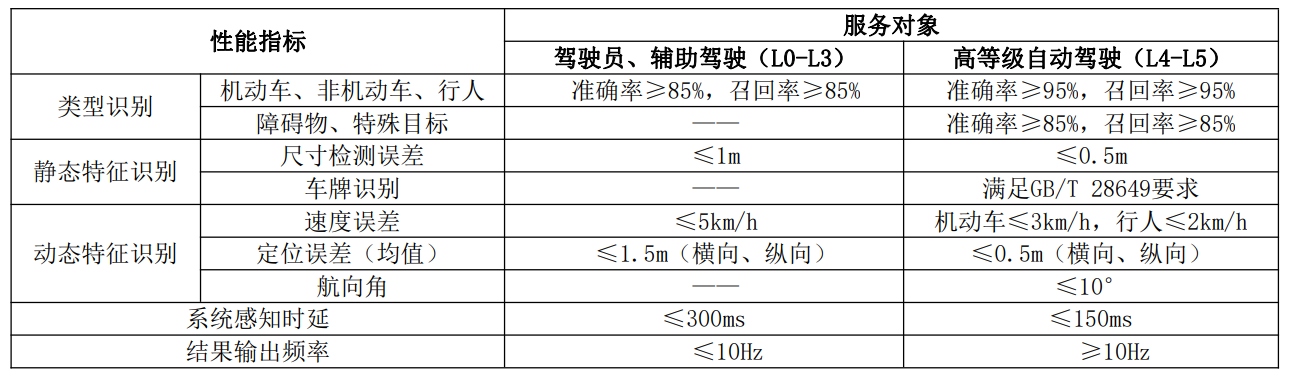
路侧感知定位系统对交通参与者识别与定位应满足以下性能要求,如表3所示。
表 3 交通参与者感知定位性能要求
5.3.2 交通事件感知定位
5.3.2.1 类型识别
系统可识别的交通事件类型应满足GB/T 28789、GB/T 29100及相关标准要求,包括但不限于:
a) 停止事件;
b) 逆行事件;
c) 行人事件;
d) 抛洒物事件;
e) 拥堵事件;
f) 低速/超速事件;
g) 交通事故;
h) 机动车驶离;
i) 道路施工;
j) 其他自定义事件。
5.3.2.2 特征识别 系
统应输出交通事件的感知结果信息,包括但不限于以下内容:
a) 交通事件类型;
b) 事件位置;
c) 事件所在车道(可选);
d) 事件影响区域(可选);
e) 事件持续时间(可选);
f) 事件优先级(可选);
g) 事件涉及的交通参与者信息(可选);
5.3.2.3 性能要求
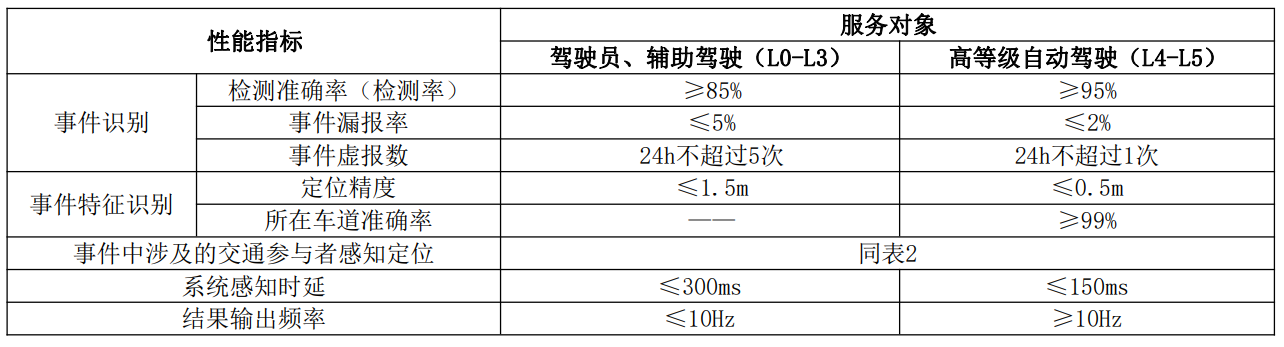
路侧感知定位系统对交通事件识别与定位应满足以下性能要求,如表4所示。
表 4 交通事件感知定位性能要求
6 总体技术要求
6.1 通用要求
6.1.1 时空参照系
系统空间坐标系应采用CGCS2000坐标系,投影宜采用通用横轴墨卡托投影(UTM)。 系统时间坐标系采用协调世界时(UTC)。
6.1.2 时间同步要求
系统应具备标准时钟源同步功能,宜支持GPS、NTP或PTP等时钟同步协议,宜具备对接入设备 进行统一校时的功能,系统内各设备时间同步误差不大于5ms。
6.1.3 高精度地图要求
应提前采集并制作感知区域内的高精度地图,地图要素应尽量多样丰富,横纵向的道路交通标 线应清晰、准确,地图应满足T/CSAE 185及相关标准要求。
6.1.4 数据时间戳同步要求
接入到同一路侧计算设备的感知摄像机输出的检测时间戳应保持一致,不同感知设备的检测时 间戳误差不大于100ms。
6.1.5 网络传输要求
路侧感知设备与路侧计算设备之间通过光纤和接入交换机进行网络通信和数据交互,接入交换 机的单向带宽宜不小于15Mbps。
6.2 路侧计算设施
6.2.1 功能要求
路侧计算设施应具备以下功能:
a) 支持摄像机、毫米波雷达、激光雷达等设备接入;
b) 支持从摄像机获取视频流并进行视频解码、目标检测、目标跟踪、目标定位等功能,从毫 米波雷达获取结构化数据,从激光雷达获取点云数据,并进行目标融合定位、跟踪等功能;
c) 按规定对图像、视频与业务数据进行存储,可支持远程或本地数据查询检索;
d) 可根据车路协同应用需求,提供 V2X 应用服务,包括报文的制作、收发、解析和处理等;
e) 对系统和接入设备进行管理,包括参数配置、OTA 升级、设备运维管理、远程开关机/重 启、日志管理、高精度时钟同步等;
f) 支持与云控平台断网状态下,仍可提供不间断业务服务。
6.2.2 性能要求
路侧计算设施应满足以下性能要求: a) 灵活支持不同的设备选型和配置方案,算力支持不少于 4 路摄像头、4 路毫米波雷达及 1 路激光雷达同时接入; b) 路侧计算设备对交通参与者、交通事件等融合感知识别的能力应满足本文件 6.1.2 节相关 要求,包括检测准确率、时延、定位精度等; c) 感知的结构化数据输出频率应满足不同场景的应用需求。
6.2.3 接口要求
路侧计算设施应满足以下接口要求:
a) 路侧计算设备至少应具备 2 个以太网接口;
b) 支持接入到云控平台,将路侧感知定位结果信息发送到云控平台,开展更多车路协同应用 服务,路侧计算设施与云控平台宜采用 RJ 45、光纤、USB、RS232、RS 485 等接口方式, 支持 10000Mbps 以上网络传输;也可选配 4G/5G/WiFi 等接入模块,支持无线回传;
c) 支持摄像头设备接入,可采用以太网接口方式,支持 SDK、GB/T 28281 或 RTSP 等协议;
d) 支持雷达设备接入,可采用以太网或 RS 485 接口方式,支持二进制、十六进制或 JSON 等 格式数据传输;
e) 支持 RSU 设备接入,可采用以太网或 4G/5G 等接口方式,支持 ASN.1 或 JSON 格式数据传输;
f) 可支持其他交通安全设施或交通管理设施接入,可以采用以太网或 4G/5G 等接口方式,数据交互内容和格式应符合道路交通或公安发布的标准规范。
6.2.4 设备可靠性要求
路侧计算设施应满足以下可靠性要求: a) MTBF 不小于 50000h,设备可用性宜不低于 99.999%; b) 工作温度:-30℃~+85℃; c) 设备具备防浪涌,防静电,高抗震等特性; d) 工作湿度:5%-95%,无冷凝; e) 防水防尘等级:不低于 IP66。
6.2.5 部署要求
路侧计算设备在部署安装时: a) 宜与配电箱抱杆安装,抱杆箱下沿距离地面高度不小于 3m; b) 抱杆箱可优先考虑部署在电警杆或监控杆的立臂上。
6.3 感知摄像机
6.3.1 通用要求
感知摄像机应满足以下通用要求:
a) 可根据需要选配枪式摄像机、球形摄像机或鱼眼摄像机等;
b) 摄像机可具备算力和 AI 处理能力,具备一定精度的感知识别与定位能力;
c) 具备交通事件检测功能的感知摄像机应满足 GB/T 28789 及相关标准要求;
d) 具备监控执法功能的感知摄像机应满足 GB/T 28181、GA/T 1127 及相关标准要求;
e) 具备交通运行监测功能的感知摄像机应满足 GB/T 24726、GB/T 33171 及相关标准要求。
6.3.2 功能要求
感知摄像机应满足以下功能要求:
a) 交通现场、场端连续视频监控;
b) 多码流视频录像;
c) 可具备自诊断和报警功能;
d) 支持 GPS 或 NTP 时钟同步,且能输出毫秒级时间戳。
6.3.3 性能要求
感知摄像机应满足以下性能要求: a) 支持输出可配置的 H.265 或 H.264 码流,码流支持可定义,同时支持 MJPEG 编码,抓拍图 片采用 JPEG 编码及 Smart JPEG 压缩,图片质量可设置; b) 支持抓拍图片断网续传; c) 应采用不低于 1/1.8 英寸 400 万像素的 CMOS; d) 可选支持近红外补光功能,最大红外补光距离 100m。
6.3.4 接口要求
感知摄像机应满足以下接口要求:
a) 至少 1 个 RS-485 接口或 1 个 RS-232 接口,1 个 RJ45 10M/100M/1000M 自适应以太网口;
b) 支持 ISAPI、GB/T28181 协议,并支持 SDK 二次开发;
c) 设备应最少支持 RTSP 及 GB/T28181 两种视频协议输出视频流。
6.3.5 设备可靠性要求
感知摄像机应满足以下可靠性要求:
a) 工作环境温度:-30℃~+65℃;
b) 工作环境湿度:5%~95%,无凝结;
c) 防护等级:IP66;
d) 设备 MTBF 时间应不小于 50000h;
e) 具有防浪涌功能;
f) 光学窗口防尘防水,加热除雾除雪等功能。
6.3.6 安装部署要求
路侧感知摄像机在部署安装时:
a) 优先考虑部署在电警杆或监控杆的横臂上,安装位置尽量靠近道路中央位置;
b) 当电警杆或监控杆不可用时,可考虑使用信号灯杆,或另新立杆;
c) 部署高度为 6~8m;
d) 感知区域内应尽量避免树木等遮挡,以免影响感知设备的感知效果;
e) 设备安装应牢固,必要时可安装支护结构以保证稳定性。
6.4 毫米波雷达
6.4.1 功能要求
部署在路侧的毫米波雷达应满足以下功能要求:
a) 可对 8 车道(含正向车道和反向车道)范围内的不少于 256 个检测目标进行检测,并可对 检测目标进行轨迹跟踪监测;
b) 支持 GPS 或 NTP 授时,可输出毫秒级时间戳;
c) 支持同时对多个服务端传输数据。
6.4.2 性能要求
路侧毫米波雷达应满足以下性能要求:
a) 最远探测距离:纵向不少于 250m;
b) 交通流量检测精度:≥95%;
c) 平均车速≥95%;
d) 占有率检测精度≥95%;
e) 排队长度检测精度:≥95%;
f) 测速范围 0~220km/h;
g) 速度检测分辨率:0.6km/h;
h) 速度检测精度:0.2km/h;
i) 距离检测分辨率:近程 0.5m,远程 2m;
j) 距离检测精度:近程 0.1m,远程 0.5m;
k) 雷达角度分辨率最大支持 2°,测角精度最大支持 0.25°;
l) 雷达帧率:不小于 10fps。
6.4.3 接口要求
路侧毫米波雷达应满足以下接口要求: a) 支持至少 1 个 RS485/232 接口或 1 个 10/100/1000M 自适应 RJ45 接口; b) 支持通过 TCP/UDP 方式连接其他设备。
6.4.4 设备可靠性要求
路侧毫米波雷达应满足以下可靠性要求:
a) 工作环境温度:-30℃~+65℃;
b) 工作环境湿度:0%~95%,无凝结;
c) 防护等级:IP65;
d) 撞机/振动承受度:100g/rms;14g/rms;
e) MTBF≥50000h;
f) 具有电压过载保护,浪涌保护,设备防雷屏蔽;
g) 可在全气候环境下稳定工作,包括雨、雾、雪、大风、冰、灰尘等。
6.4.5 安装部署要求
同6.3.2.6节。
6.5 激光雷达
6.5.1 功能要求
部署在路侧的激光雷达应满足以下功能要求:
a) 支持雷达数据获取、可视化、存储和回放功能;
b) 支持 GPS、NTP 或 PTP 校时,输出毫秒级时间戳;
c) 支持点云输出、跟踪目标输出点云和跟踪目标输出;
d) 支持多种回波检测方式设定(可选);
e) 支持多雷达数据融合功能(可选)。
6.5.2 性能要求
路侧激光雷达应满足以下性能要求:
a) 测距:150m@10% NIST,量程与感知距离不低于 200m;
b) 距离精度≤±3cm ,均方根误差≤3cm;
c) 跟踪目标数不小于 128 个(可选);
d) 视角(垂直):不低于 25°;
e) 视角(水平):100°以上;
f) 垂直角度分辨率平均不小于 0.2°;
g) 水平角度分辨率平均不小于 0.2°;
h) 帧率:不低于 10Hz;
i) 防护等级:生物安全 1 级或者豁免等级;
j) 虚警率(@100klx)<0.01%;
k) 主动防串扰/干扰功能;
l) 雨、雪、雾、霾等天气条件下正常工作;
m) 24V 供电电压(可选)。
6.5.3 接口要求
路侧激光雷达应满足以下接口要求:
a) 至少一个 10M/100M/1000M 自适应 RJ45 以太网口或 RS485 接口;
b) 宽电压支持,兼容 24V±20%;;
c) 支持 UDP/TCP 通讯协议;
d) 应用层支持 MQTT 协议或 protobuf 协议(可选);
e) 支持 NTP 时间同步协议,可选 PPS、PTP、PTPv2、GPS 等协议。
6.5.4 设备可靠性要求
路侧激光雷达应满足以下可靠性要求:
a) 工作环境温度:-30℃~+65℃;
b) 工作环境湿度:0%~95%,无凝结;
c) 防护等级:IP67;
d) MTBF 时间应不小于 50000h

