
热门标签
热门文章
- 1nginx配置静态文件访问_nginx 文件访问
- 2wind按照docker desk启动报错Docker Desktop Docker Desktop - Windows Hypervisor is not present Docker Des
- 3Harmony鸿蒙开发 三、日志及调试_harmonyos4.0系统日志
- 4h5页面调用小程序分享方法_微信h5页面自定义分享能用小程序appid吗
- 5训练自己的yolo3模型用于识别机动车及部分道路信息_yolo 车辆识别教程
- 62023最新PS(photoshop)Win+Mac免费下载安装包及教程内置AI绘画-网盘下载_photoshop2023安装包
- 7Python爬虫热点项目之实现代理IP池(IP proxy pool)_ip proxy pool api
- 8tar命令之--exclude参数 排除指定的文件或目录
- 9Ubuntu 设置Root用户 远程设置root用户_ubuntu root远程权限修改
- 10【JAVA】#详细介绍!!! synchronized 加锁 详解(1)!_java 加锁
当前位置: article > 正文
Opencv中的MeanShift图像分割和视频背景分离(python实现)_opencv python meanshift
作者:花生_TL007 | 2024-03-22 03:41:11
赞
踩
opencv python meanshift
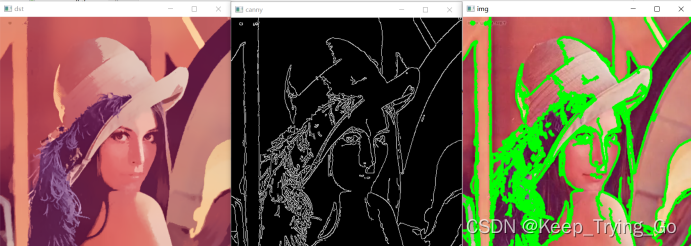
1.MeanShift原理
(1)严格来说该方法并不是用来对图像进行分割的,而是在彩色层面的平滑滤波;
(2)它会中和色彩分布相近的颜色,平滑色彩细节,侵蚀掉那些面积较小的颜色区域;
(3)它以图像上任一点P为圆心,半径为sp,色彩幅值为sr进行不断的迭代;
pyrMeanShiftFiltering(src, sp, sr, dst=None, maxLevel=None, termcrit=None):
- 1
Src:输入的原始图像;
Sp:双精度半径,值越大,模糊程度越大;
Sr:色彩的幅值变化范围,变化范围越大,连成一片区域的也就是越大。
Dst:输出的图像;
maxLevel:默认值为1;
Termcrit:终止标准:何时停止meanshift迭代。
import os import cv2 import numpy as np img=cv2.imread('images/lenna.png') img=cv2.resize(src=img,dsize=(450,450)) #图像分割 dst=cv2.pyrMeanShiftFiltering(src=img,sp=20,sr=30) #图像分割(边缘的处理) canny=cv2.Canny(image=dst,threshold1=30,threshold2=100) #查找轮廓 conturs,hierarchy=cv2.findContours(image=canny,mode=cv2.RETR_EXTERNAL,method=cv2.CHAIN_APPROX_SIMPLE) #画出轮廓 cv2.drawContours(image=img,contours=conturs,contourIdx=-1,color=(0,255,0),thickness=3) cv2.imshow('img',img) cv2.imshow('dst',dst) cv2.imshow('canny',canny) cv2.waitKey(0) cv2.destroyAllWindows() if __name__ == '__main__': print('Pycharm')

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
Canny边缘检测算法:
https://mydreamambitious.blog.csdn.net/article/details/125116318
图像查找findHomography:
https://mydreamambitious.blog.csdn.net/article/details/125385752
2.视频前后景分离
(1)MOG2去除背景
在createBackgroundSubtractorMOG的基础上进行了改进;
混合高斯模型为基础的前景或者背景分割算法
createBackgroundSubtractorMOG2(history=None, varThreshold=None, detectShadows=None):
- 1
History:进行建模的需要多长的参考帧,默认值为200;
varThreshold:判断背景模型是否能很好地描述像素。
detectShadows:阴影检测;
import os import cv2 import numpy as np #打开摄像头 cap=cv2.VideoCapture('video/University_Traffic.mp4') #创建前景分离对象 bgsegment=cv2.createBackgroundSubtractorMOG2() while cap.isOpened(): OK,frame=cap.read() if OK==False: break frame=cv2.resize(src=frame,dsize=(500,500)) fgmask=bgsegment.apply(frame) cv2.imshow('img',fgmask) if cv2.waitKey(1)&0xFF==27: break cap.release() cv2.destroyAllWindows() if __name__ == '__main__': print('Pycharm')
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25

从视频帧中可以看到MOG2产生了很多的噪点,所以对此提出了改进的方法:
GMG去除背景的方法:
静态背景图估计和每个像素的贝叶斯分割抗噪性更强;
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/花生_TL007/article/detail/285061
推荐阅读
相关标签

