- 1变配电站配电监控解决方案--变电站综合自动化系统
- 2CAS基本原理和应用_cas 应用管理
- 3企业数字化转型到底是什么?_数智化转型五部曲
- 4JAVA权重算法(如Dubbo的负载均衡权重)_java权重分配算法
- 5Android 滑动菜单(DrawerLayout + NavigationView )_android滑动菜单
- 6PSQL容器带脚本初始化_postgresql基于容器创建表的初始化脚本
- 7eclipse无法启动提示 java.lang.NoClassDefFoundError: org/w3c/dom/stylesheets/StyleSheet问题
- 8VSCode SSH免密登录失败原因 原因分析及解决_vscode设置密钥登陆没有效果
- 9【摘要】抽取式摘要:TextRank和BertSum。
- 10通过包名,直接精确启动一个三方Activity_通过包名启动应用startactivity
无人机/飞控--ArduPilot、PX4学习记录(2)
赞
踩
这是一篇碎碎念,零零碎碎的记录了环境配置过程,仅供本人记录学习历程和参考。(记录的挺乱的,但是文章链接里的博客写的是真好)
本章主要完成的目标: 安装PX4 并 成功运行出3D无人机界面。
参考文章:
搭建PX4环境:
PX4/Pixhawk - 编译环境搭建_pix4 yu pixhawk-CSDN博客
使用Dronekit控制无人机,DroneKit配置:
使用Dronekit控制无人机,DroneKit配置-CSDN博客
Dronekit 搭配使用Ardupilot 和 PX4:
Dronekit 搭配使用Ardupilot 和 PX4_px4 dronekit 飞航点-CSDN博客
进入已经配置好的ubuntu18.04环境中,首先安装drone kit,安装成功的结果:

pip install dronekit-sitl 命令成功结果:

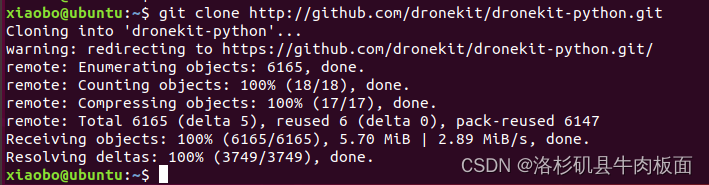
获取实例源码到本计算机上结果:
依赖安装完成:

之后安装ardupilot,报错:

原因是网络问题。解决方案:
安装MAVProxy和pymavlink:

直接使用官方的配置脚本安装环境 看样子应该是安装好了,期间遇到了错误:
Could not find a version that satisfies the requirement sympy>=1.10.1 (from -r /home/xiaobo/PX4-Autopilot/Tools/setup/requirements.txt (line 29)) (from versions: 0.5.14, 0.5.15, 0.6.0, 0.6.1, 0.6.2, 0.6.3, 0.6.4, 0.6.5, 0.6.6, 0.7.0, 0.7.1, 0.7.2, 0.7.4, 0.7.4.1, 0.7.5, 0.7.6, 0.7.6.1, 1.0, 1.1, 1.1.1, 1.2, 1.3, 1.4, 1.5b1, 1.5rc1, 1.5, 1.5.1, 1.6rc1, 1.6rc2, 1.6, 1.6.1, 1.6.2, 1.7rc1, 1.7, 1.7.1, 1.8, 1.9rc1, 1.9) No matching distribution found for sympy>=1.10.1 (from -r /home/xiaobo/PX4-Autopilot/Tools/setup/requirements.txt
文心一y给出的解决方案:
错误消息表示pip无法找到满足
sympy>=1.10.1要求的版本。从列出的可用版本中,最高的版本是1.9,而你的requirements.txt文件要求的最低版本是1.10.1。这意味着你尝试安装的版本比当前在PyPI(Python Package Index)上可用的最新版本还要新。为了解决这个问题,你可以采取以下方法:
更新
requirements.txt文件中的版本号:
如果可能的话,将requirements.txt文件中sympy的版本号降低到一个可用的版本,比如sympy>=1.9。然后再次运行pip安装命令。
于是我就按照路径-r /home/xiaobo/PX4-Autopilot/Tools/setup/requirements.txt ,将requirements.txt里的sympy>=1.10改为了 1.9, 问题解决。

继续运行...

.....按照博主的步骤,一步一步来,主要是解决了网络问题:
最后一步,
进入PX4-Autopilot目录,使用以下指令进行配置和编译:
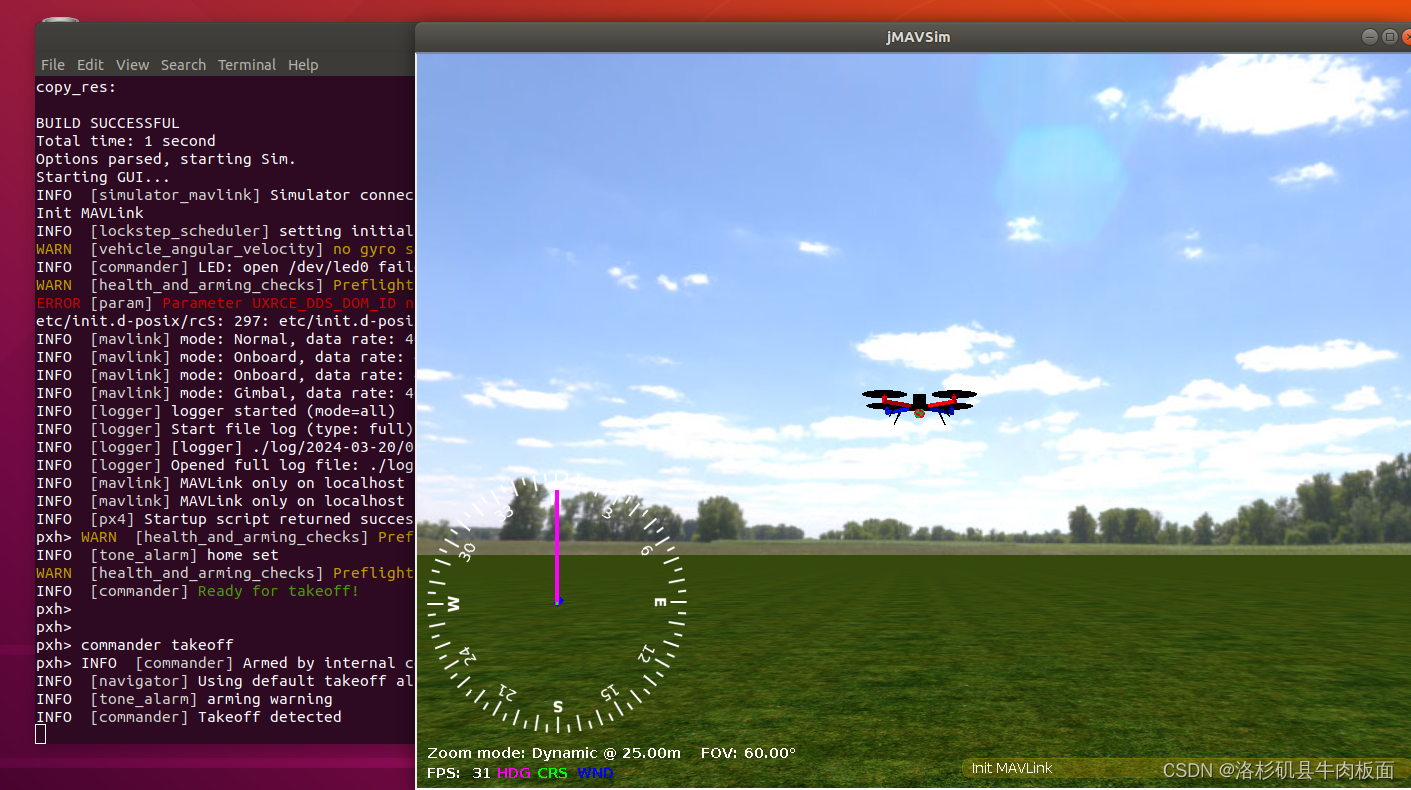
make px4_sitl jmavsim
在终端输入以下指令起飞飞机:
commander takeoff
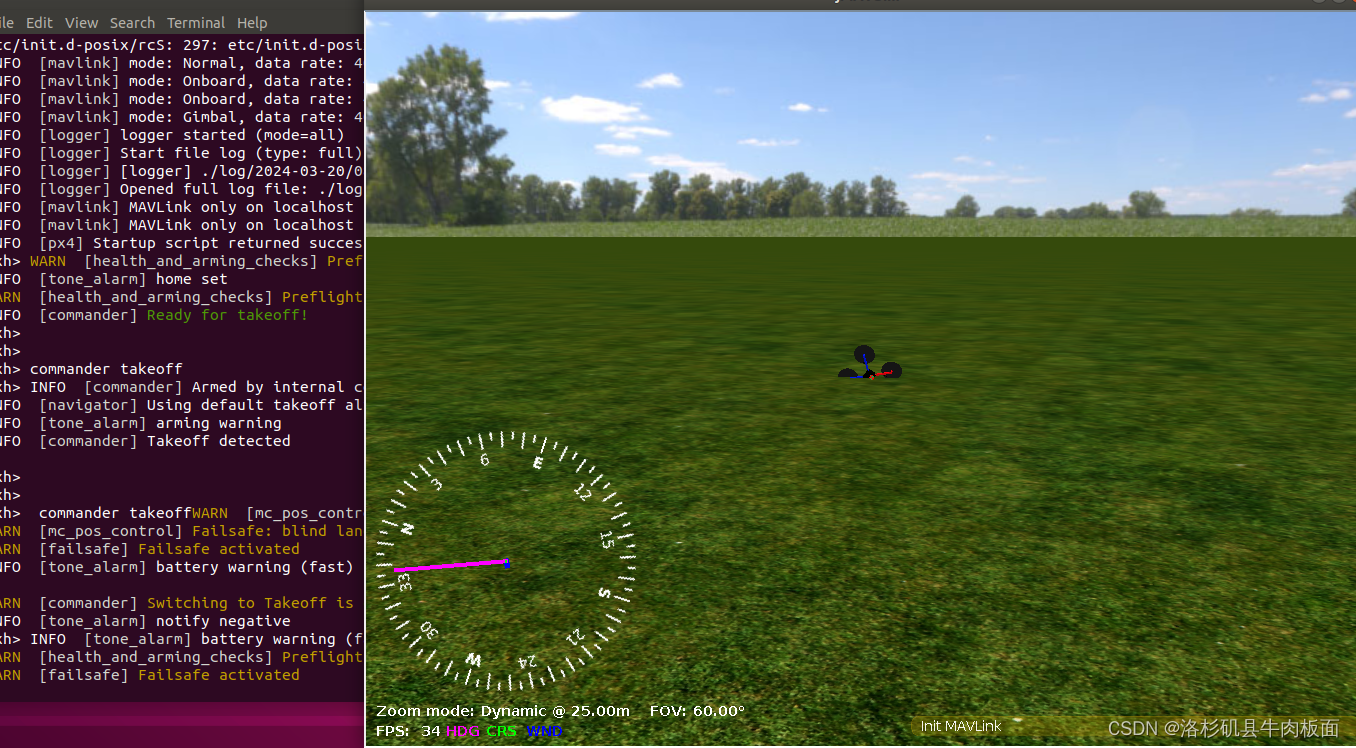
终于运行出来了:(出现了PX4和3D界面)
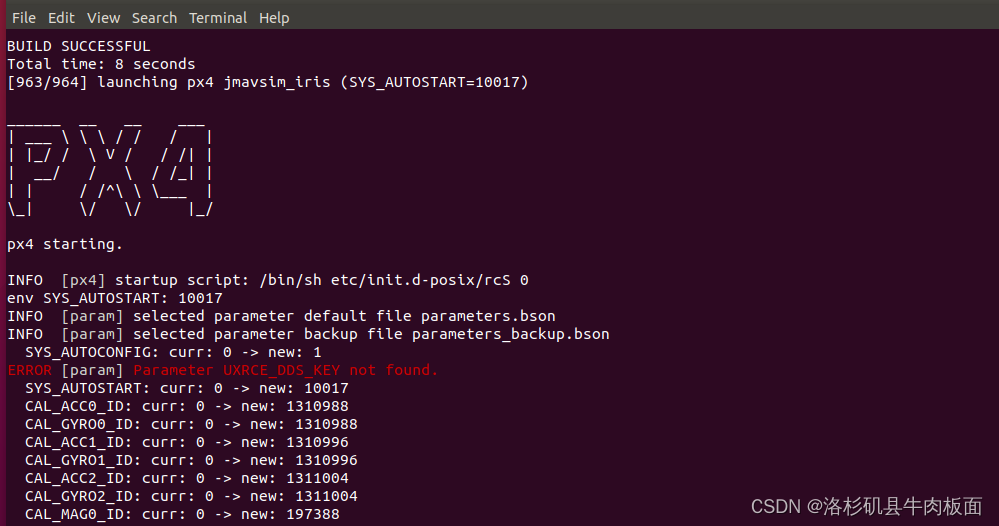

仅管有些错误,但是起码弹出了这个界面,这些错误先保留:
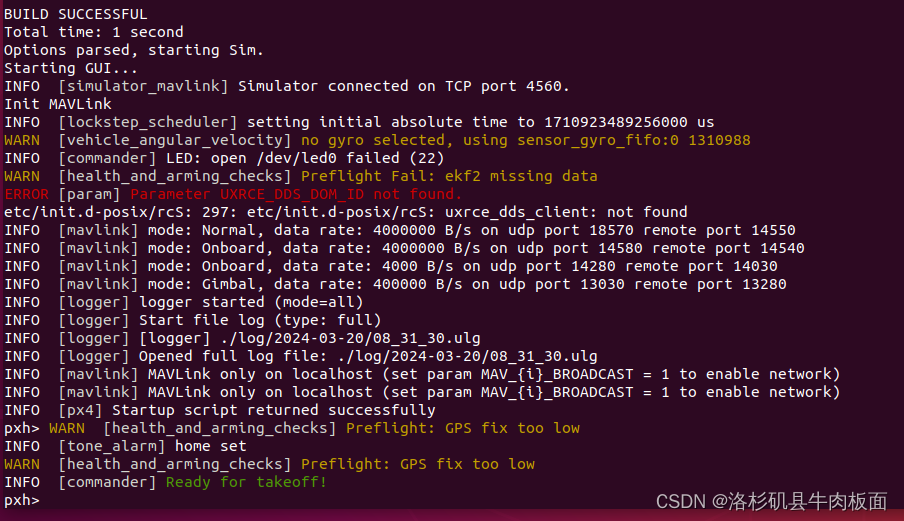
接下来,飞机正常起飞了:
用↑↓键盘键盘操作了一下,小飞机炸鸡了..hhh