
- 1Python Matplotlib 设置显示中文(中文乱码)_用matplotlib画图如何显示中文
- 2技能梳理27@体感机械臂_机械臂的背景及意义
- 3NLP学习路线总结:从入门到精通_nlp学习之路
- 4Python matplotlib.pyplot常用方法_plt.text(a, b + 0.05, '%.2f' % b, ha='center', va=
- 5智能学习 | MATLAB实现PSO-SVM多输入单输出回归预测(粒子群算法优化支持向量机)_matlab svm预测模型 多输入
- 6‘error:03000086:digital envelope routines::initialization“处理方法
- 7点餐|外卖订餐小程序|基于微信小程序的外卖订餐系统设计与实现(源码+数据库+文档)_基于微信小程序的点餐系统设计与实现 论文
- 8springboot/java/php/node/python微信小程序的超市外卖系统【计算机毕设】
- 9循环队列和链队列的表示和实现_栈和队列实现循环队列队列中元素类型elemtype为char
- 10节日里程序员的朋友圈里,个个都是戏精
MTF模块 PX4 光流模块详细配置_ekf2_aid_mask
赞
踩
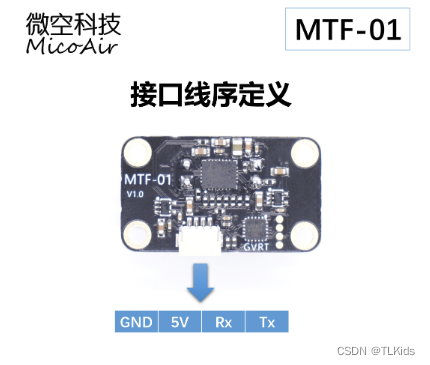
对于研究无人机的新手,直接飞手动模式,可能过于困难。在室内测试时,又没有GPS可用。为了安全和方便起见,可以考虑选用光流模块,降低入手难度。这里我们选择微空科技出品的MTF-01模块。这里主要考虑的是其激光高度计的功率更大,在室外强光条件下,依旧可以稳定工作。
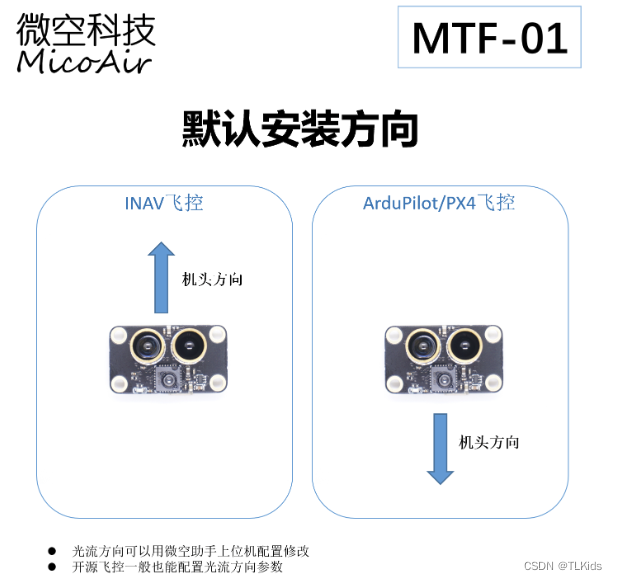
模块朝向与线序:
官方配置说明:

保姆级别配置教程:
-
使用微空助手配置模块输出协议为
Mav_Px4 -
配置
MAV_1_CONFIG为TELEM2(102) (视具体使用的接口而定) -
配置串口波特率
SER_TEL2_BAUD为115200 (和上一步设置的串口对应) -
EKF2_AID_MASK设置为2 (开启使用光流) -
SENS_FLOW_ROT设置为0 (光流安装方向,根据你具体安装情况而定!) -
根据光流模块安装位置设置
EKF2_OF_POS_X,EKF2_OF_POS_Y,EKF2_OF_POS_Z(这些参数是机体NED坐标系下的!) -
根据光流模块安装位置设置
EKF2_RNG_POS_X,EKF2_RNG_POS_Y,EKF2_RNG_POS_Z -
设置
EKF2_RNG_AID为1 (设置为1后,定高高度由激光计提供,如果遇到障碍物,飞机会爬升。如果你不希望这样,那就用默认的0即可 ,此时高度环控制采用气压计融合结果),EKF2_RNG_A_HMAX为8 ,EKF2_RNG_NOISE为0.05 -
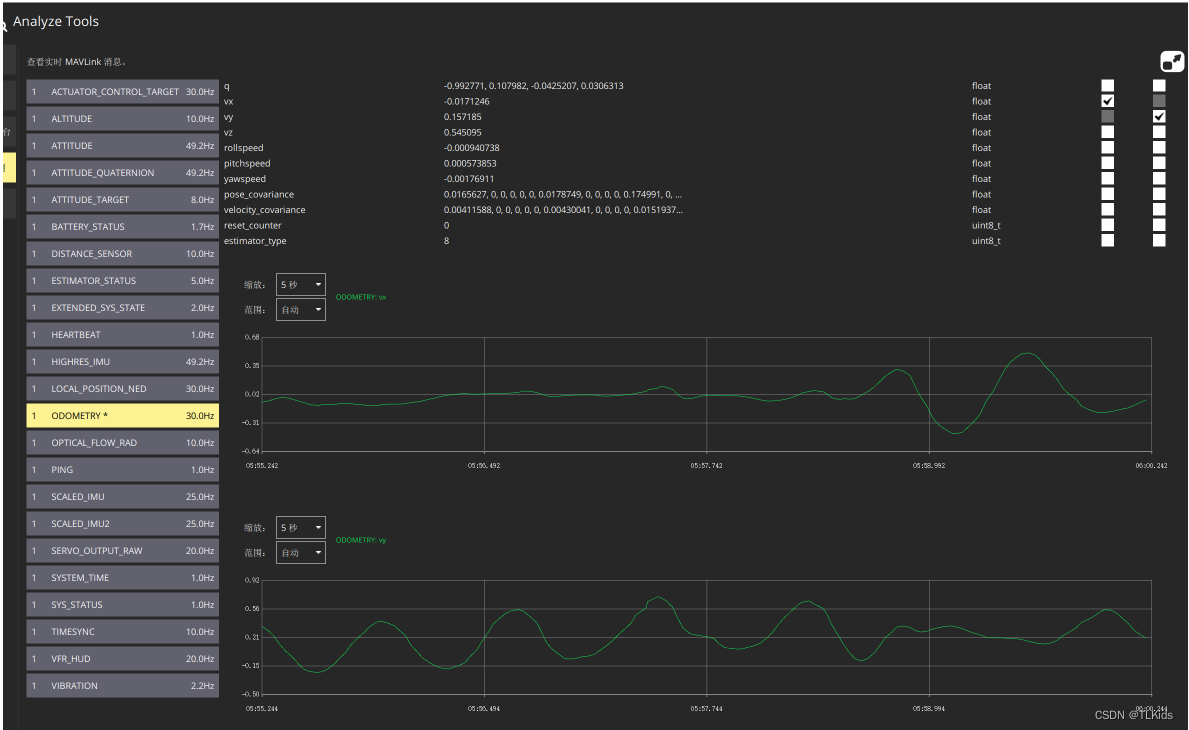
上述配置完成后,检查光流模块的定位效果:可以查看 ODOMETRY / LOCAL_POSITION_NED 中的x, y, vx, vy。注意:这个数据都是在NED坐标系下的结果!如果估计的结果和实际移动的方向是一致的,那么就说明融合ok。为安全起见,可以先在户外进行定点飞行测试。
模式设置:
- 手动模式(角度环):manual, stabilized (高度直接由油门控制,有一定难度)
- 定高模式:altitude(高度控制有控制器介入,姿态控制和stabilized一致,该模式既灵活也稳定且不需要额外传感器,只要飞控带气压计即可,最为推荐)
- 定点模式:position (该模式由位置环介入控制,飞行更加稳定,可以脱手悬停。但是需要配置光流模块,且在该模式下控制飞机的前后左右较为迟钝,遇到非常紧急的情况可能有些来不及!应该也可以调节一下该环节的速度限制,可能手感会更好一些。
实际测试PX4-1.11.0及以上的固件版本都正常工作,定点效果很ok。PX4光流官方教程地址:https://docs.px4.io/main/en/sensor/optical_flow.html#ekf2

