
热门标签
当前位置: article > 正文
基于yolov8+deepsort的多目标跟踪完成行人、车辆计数和越界检测
作者:花生_TL007 | 2024-04-28 02:29:41
赞
踩
yolov8+deepsort
一 、基本概念:
1. MOT(多目标跟踪):每一帧定位每一个目标,并绘制其运动轨迹;
2. DeepSORT通过融合动作和外观信息来实现更准确的关联,它使用ReID网络来提前目标外观特征,提升了对缺失和遮挡部分的鲁棒性

二、整体流程
(1)、Input->初始化metrix->yolov8进行detection得到bbox和features->筛选掉confidence小于yaml文件设定的min_confidence的目标->NMS(optional)->track.predict->track.update->输出bbox.identities;
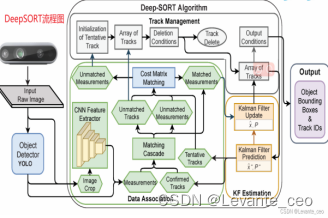
(2)、DeepSort进行Matching Cascade:对detection使用匈牙利算法(门控余弦距离)进行匹配级联,同时使用卡尔曼滤波结合检测到的数据对上一层的detection进行更新,然后将未匹配的、高度匹配的和更新的轨迹进行IOU匹配,对连续三帧都未匹配到的轨迹进行筛选过滤。总体流程如图

三、环境搭建
1) 下载Visual Studio 社区版
下载链接:下载 Visual Studio Tools - 免费安装 Windows、Mac、Linux
2) cuda、cudnn、Anaconda的安装和环境变量的配置
3) 使用安装虚拟环境: conda create -n mypytorch python=3.9;
4) 下载并安装Git,在Git CMD窗口中执行以下代码完成yolov8的克隆: git clone https://www.wpsshop.cn/w/花生_TL007/article/detail/499988
推荐阅读
相关标签

