
热门标签
热门文章
- 1XP使用技巧
- 2C++基础与技巧【顺序容器】 (三大顺序容器~vector, list, deque)_顺序寻址 vector list
- 3spyder下报错ModuleNotFoundError: No module named_它没有 spyder kernels 模块或没有安装正确的版本 (>= 2.4.0 并 < 2.5.
- 4Python基础知识总结(期末复习精简版)_华中农业大学python考试
- 5微信开发者工具使用git提交项目至gitee远程仓库(保姆级)_微信开发者工具 gitee
- 6精选力扣500题 第31题 LeetCode 69. x 的平方根【c++ / java 详细题解】_69. x 的平方根 c++
- 7数据结构-栈
- 8cfg是什么
- 9自定义幂等注解_自定义注解实现幂等
- 10猿创征文|2022年前端之路——我的前端开发好帮手_csdn前端征文
当前位置: article > 正文
自动驾驶控制-基于运动学模型的LQR算法路径跟踪仿真_运动学模型仿真双移线
作者:花生_TL007 | 2024-05-05 16:57:28
赞
踩
运动学模型仿真双移线
自动驾驶控制-基于运动学模型的LQR算法路径跟踪仿真
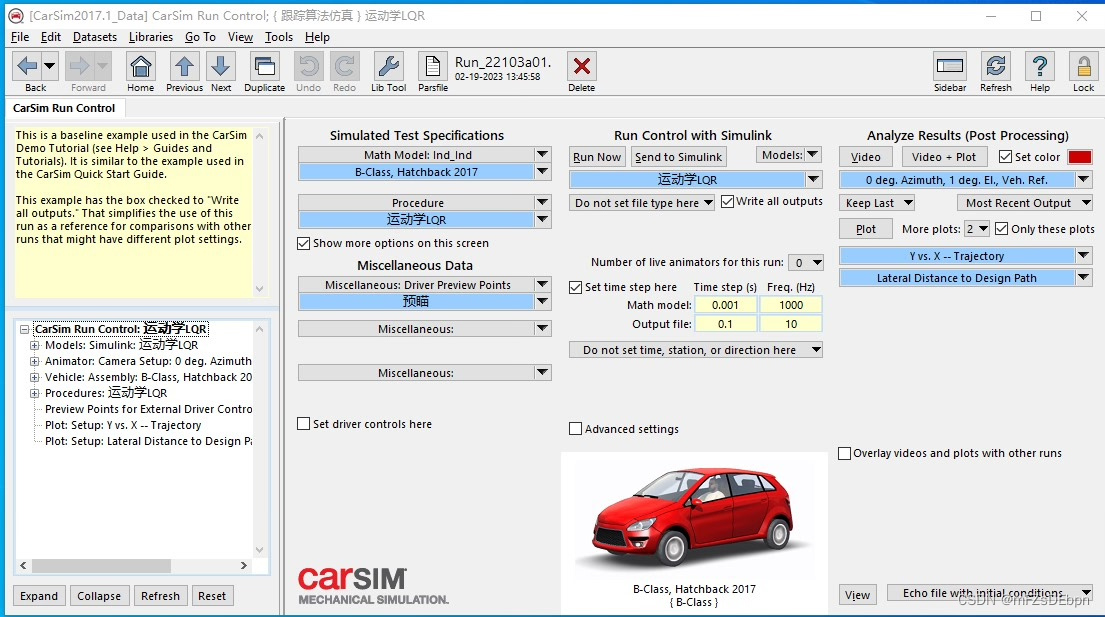
matlab和simulink联合仿真,运动学模型实现的lqr横向控制,可以跟踪双移线,五次多项式,以及其他各种自定义路径。
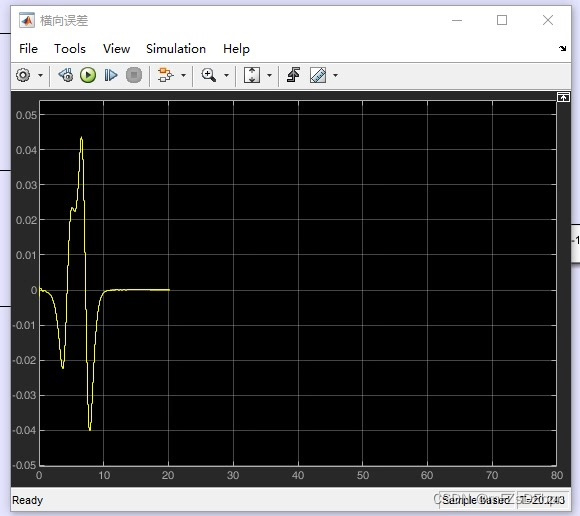
效果如图,几乎0误差,双移线路径误差在0.05m以内。

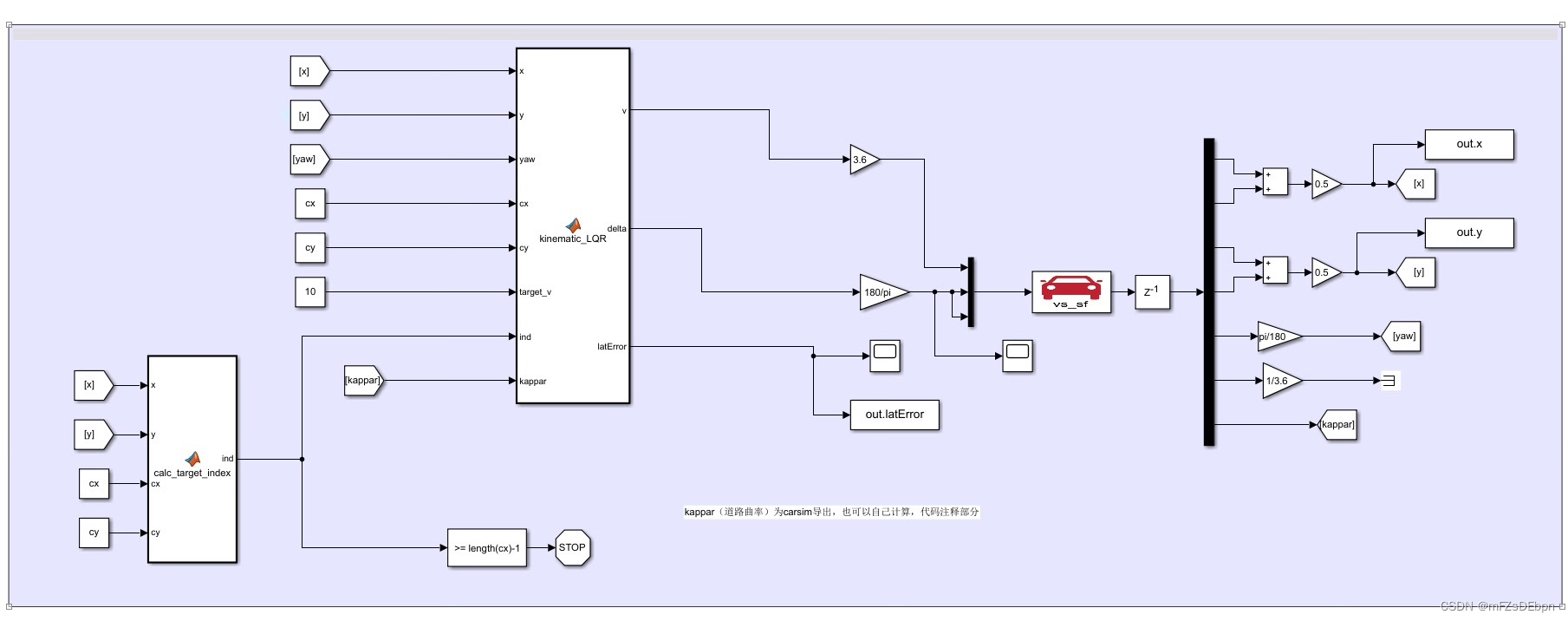
自动驾驶控制:基于运动学模型的LQR算法路径跟踪仿真
随着科技的不断发展,自动驾驶技术成为了当今研究的热点之一。在自动驾驶中,路径跟踪控制是实现自主驾驶的关键技术之一。本文将介绍一种基于运动学模型的LQR算法在路径跟踪仿真方面的应用。通过Matlab和Simulink联合仿真,我们实现了对双移线、五次多项式以及其他各种自定义路径的精准跟踪。
一、自动驾驶控制背景与现状
自动驾驶控制技术是实现
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/花生_TL007/article/detail/539909
推荐阅读
相关标签

