
热门标签
热门文章
- 1微信小程序长按与单击事件触发_微信小程序长按事件
- 2计算机设计大赛 深度学习乳腺癌分类
- 3SDXL:Improving latent diffusion models for high-resolution image synthesis_sdxl: improving latent diffusion models for high-r
- 4【100%通过率】华为OD机试真题 C 实现【不爱施肥的小布】【2023 Q1 | 100分】_不爱施肥的小布 题目描述
- 5Jersey——基本认证 & 摘要认证 & 表单认证_jersey 2.27
- 62024美赛数学建模A题思路&源码——七鳃鳗性别比例和生态系统关系_2024美赛a题
- 7健身App应该具备的功能模块_健身平台主要包含哪些核心、模块
- 8tilemap 菱形_带高度的isometric tile map 斜45度 2d 地图制作
- 9在Unity中的image实现透明度渐变_unity改变image透明度
- 10jenkins忘记用户名和密码_jekins 用户名密码
当前位置: article > 正文
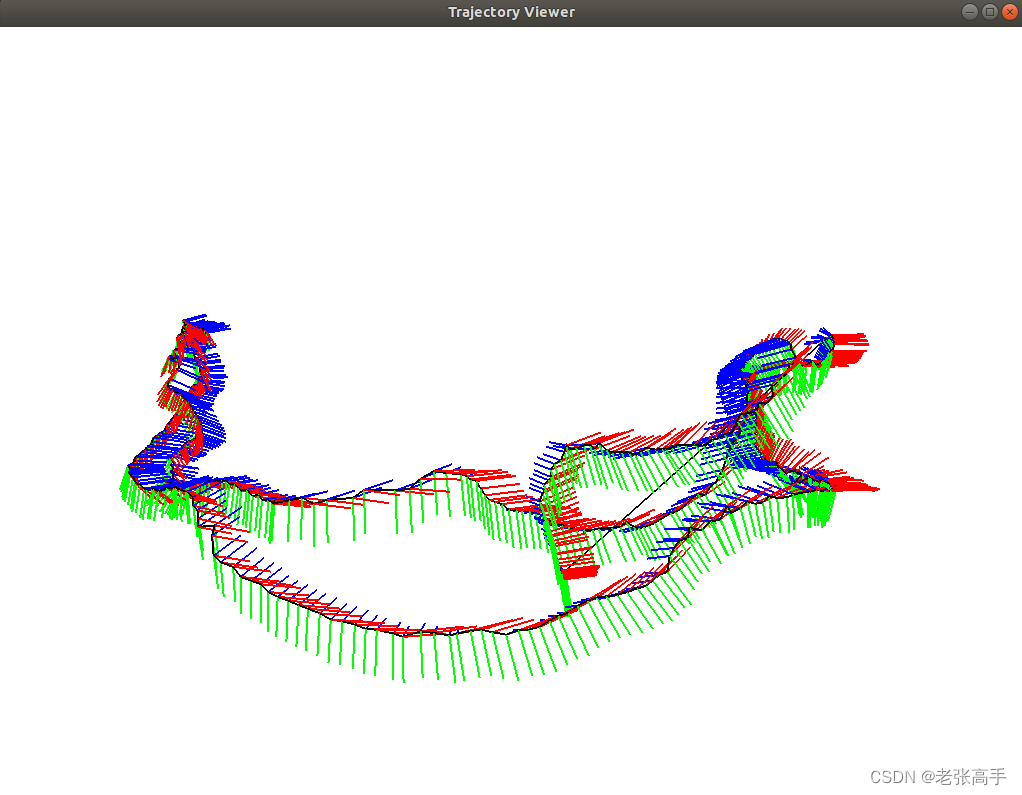
SLAM第三讲实践:运行显示运动轨迹plotTrajectory.cpp_slam绘制运动轨迹
作者:菜鸟追梦旅行 | 2024-02-18 00:56:06
赞
踩
slam绘制运动轨迹
1.先修改源码
把本来写的是 ./examples/trajectory.txt 改成 ../../examples/trajectory.txt
因为观察外边的目录结构,就发现这个txt文件是存在examples下面的,但是呢你执行的时候,是在examples/build下执行的
2.安装库
#sudo
sudo apt install libglew-dev libxkbcommon-dev wayland-protocols python3-pip doxygen graphviz graphviz-doc
sudo apt install libboost-dev libboost-thread-dev libboost-filesystem-dev
#pip3
pip3 install pytest
- 1
- 2
- 3
- 4
- 5
3.编译
切换到plotTrajectory所在目录
mkdir build
cd build
cmake ..
make
- 1
- 2
- 3
- 4
4.运行
./plotTrajectory
- 1
关于源码以及电子书可以私信我
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/菜鸟追梦旅行/article/detail/103042
推荐阅读
相关标签

