- 1测试C#图像文本识别模块Tesseract的基本用法_c# tesseract
- 2Copilot 保姆级使用指南
- 3如何在WordPress中使用 AI 进行 SEO(12 个工具)_wordpress最好的seo
- 4【爬虫】爬取旅行评论和评分_网络爬取在线评论数据 负面评价
- 5一文带你了解机器翻译的前世今生_机器翻译演变
- 6STM32 单片机 导盲杖 超声波 18650电池 光强GY-30 程序_18650供电stm32
- 7【2024最强毕业设计】金融监控系统解析!直接上代码!想学好Python一定记得看完!
- 8NLP学习路线:从基础知识到前沿技术
- 9在UniApp中实现对接PayPal支付
- 10最新阿里淘宝村-省市县数据(汇总)2009-2022年_2023年淘宝村全国的最新数据及信息
基于ENVI深度学习违章建筑物变化检测分析技术路线_违章建筑检测数据集
赞
踩
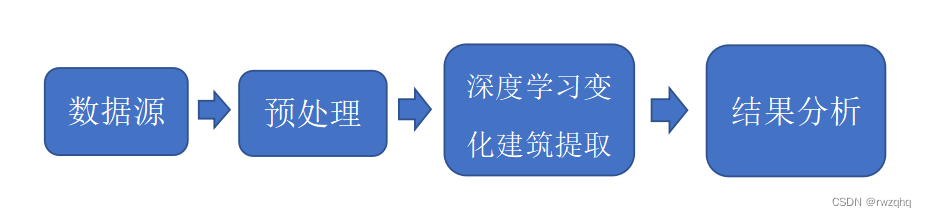
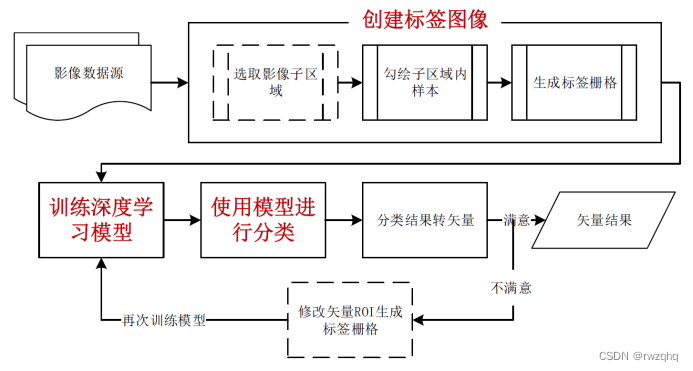
1.技术流程
2.数据源
本次实验采用高分卫星遥感3波段多光谱影像共6景(2019年和2021年各3景),分辨率为0.8米,范围为南昌市新建区周边1380平方公里,影像已镶嵌为2019年和2021年相同范围两幅研究区影像。
3.预处理
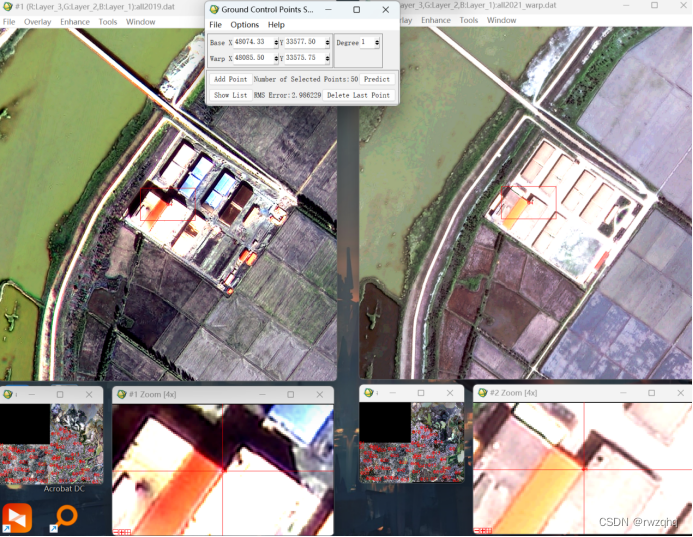
3.1几何校正
在ENVI Classic中分别打开两时期影像,利用几何校正功能下的Image to Image模块以2019年影像为基准影像,2021年影像为待校正影像人工选取地面控制点之后输出校正结果。
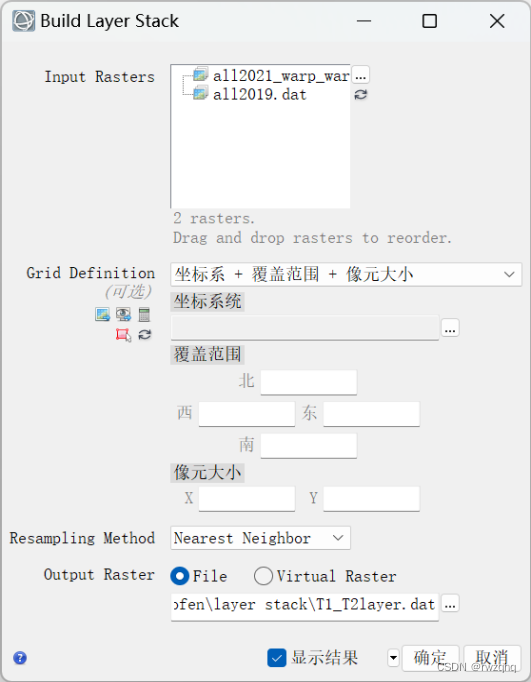
3.2波段合成
在ENVI工具箱中选择Raster Management/Build Layer Stack,选择两时期3波段影像数据,其他参数按照默认,设置文件输出路径,点击OK进行波段合成,得到两时期6波段合成结果。
4.深度学习
深度学习操作流程主要包括三个部分:首先,创建标签图像。标签栅格的生成一般先选择典型的子区域绘制样本后生成标签栅格;第二,训练深度学习模型。有了标签栅格就可以初始化深度学习模型并进行模型训练;第三,使用训练好的模型进行目标提取。训练好模型之后就可以使用训练好的模型进行目标提取。提取之后可进一步将分类结果转换为矢量ROI再次进行编辑生成新的标签栅格重复训练模型,直到得到较好的结果。
4.1创建标签图像
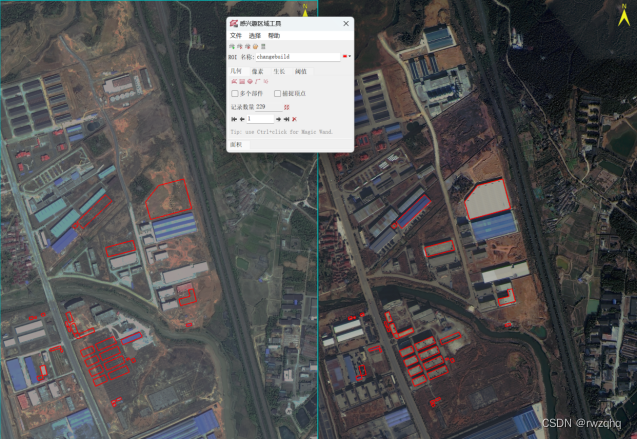
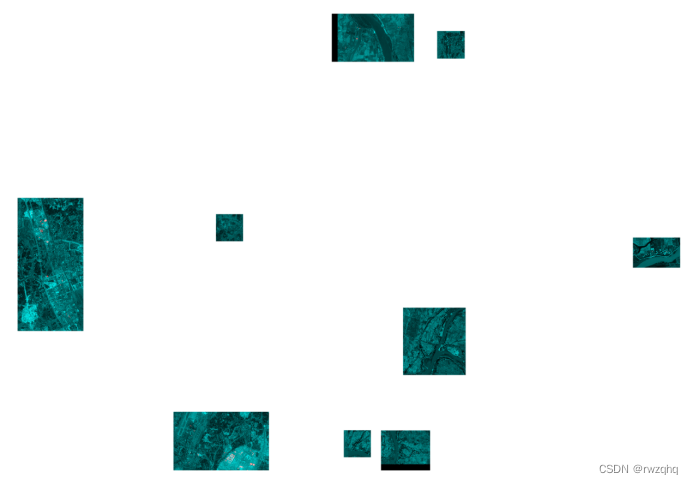
4.1.1绘制标签ROI样本
通过人工目视解译的方法绘制研究区范围内ROI 样本,在ENVI 上方工具栏点击感兴趣区域工具按钮,创建变化图斑ROI,沿着变化图斑轮廓绘制变化图斑样本。如下图所示:
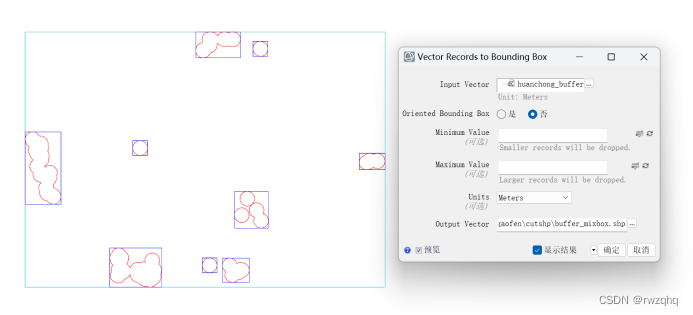
4.1.2创建样本库
保存绘制的ROI文件并导出一个shp文件,在ArcMap中打开shp文件创建1000*1000像素范围的缓冲区,对重叠的缓冲区进行合并,保存生成的缓冲区文件。在ENVI中打开Toolbox工具,选择Vector/Vector to Bounding Box,在弹出的对话框中选择生成的缓冲区矢量,Oriented Bounding Box选择No,根据图斑边界生成最小外接矩形,设置文件输出路径点击OK,得到样本矢量范围。
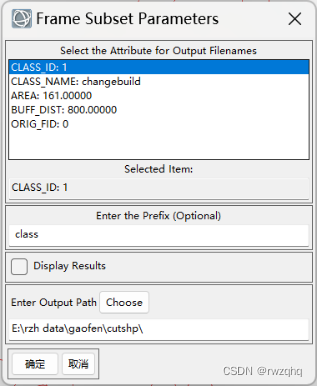
然后在Toolbox中选择Extensions/Frame Subset via Shapefile矢量分幅裁剪工具对影像进行分幅裁剪。在弹出的对话框中依次选择合成的6波段影像和上一步得到的样本矢量范围,裁剪出的各样本子区域名称按矢量文件中选择的字段名称命名,选择导出文件夹执行得到各样本区域
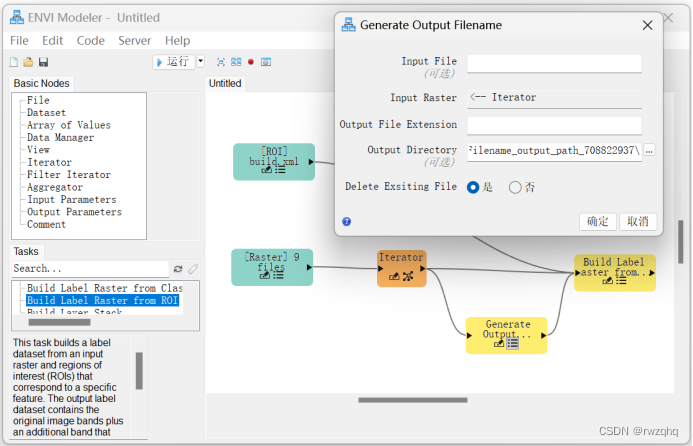
4.1.3生成标签栅格库
对于大批量标签栅格的生成,可使用ENVI Modeler建模工具进行批量标签栅格的生成。在ENVI工具箱选择Task Processing/ENVI Modeler打开建模工具,构建如下批处理模型,在Generate Output Filename节点中设置导出路径,点击Run按钮,生成批量标签栅格。(Generate Output Filename节点可在App Store中下载。)
4.2模型训练
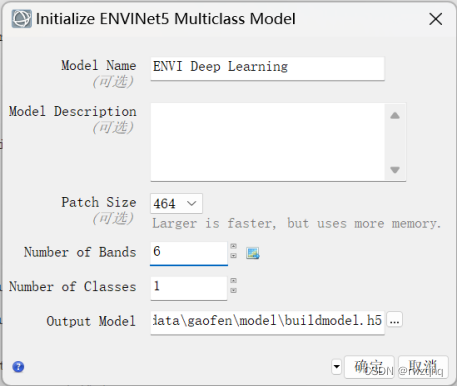
使用随机化参数组的方法训练模型。在进行随机化参数训练之前,需要先初始化一个深度学习模型。在Toolbox工具箱选择Deep Learning/Train TensorFlow Mask Model,点击Input Model下方的New Model弹出初始化模型参数设置对话框,Number of Bands为波段合成后影像的波段数量,本次研究数据为合成后6波段影像,所以设置为6。Number of Classes为变化类别,本次实验提取房屋,所以这里变化类别设置为1。Output Model选择初始化模型输出路径,点击OK,生成初始化模型。
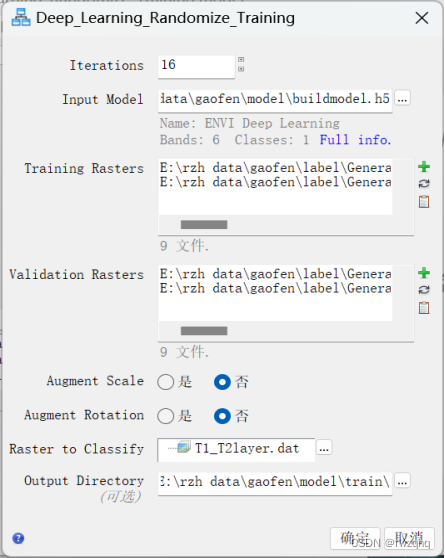
接下来训练模型。在Toolbox中,选择Deep Learning/Deep Learning Guide Map,在工具对话框选择Tools> Randomize Training Parameters Using the ENVI Modeler打开随机化参数训练工具。点击Run按钮,弹出随机化参数训练对话框。参数设置如下:
4.3模型分类
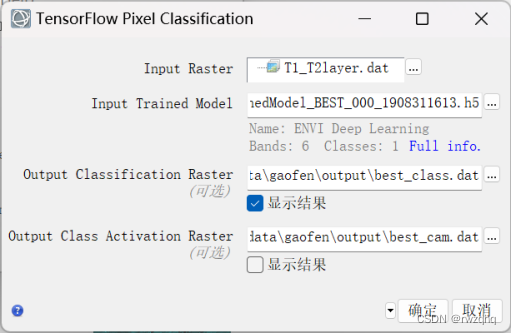
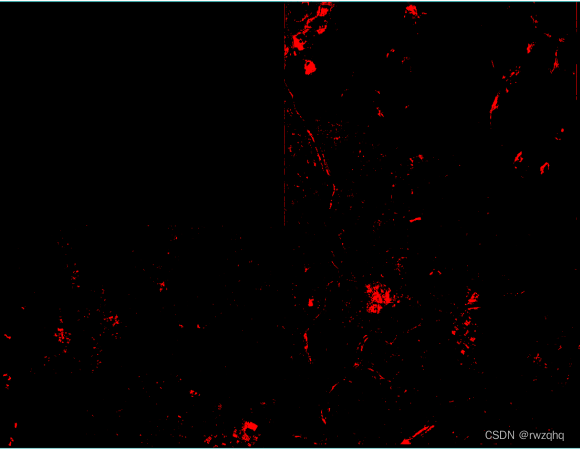
训练完成之后得到多个最优模型。在Toolbox中,选择Deep Learning/TensorFlow Mask Classification打开深度学习模型分类工具,Input Raster选择研究区数据,Input Trained Model选择训练好的最优模型,Output Classification Raster选择提取结果输出路径和文件名,Output Class Activation Raster选择类激活栅格输出路径,点击OK得到分类结果。红色图斑为提取的变化区域。
5.结果分析
5.1分类后处理
5.1.1小图斑处理
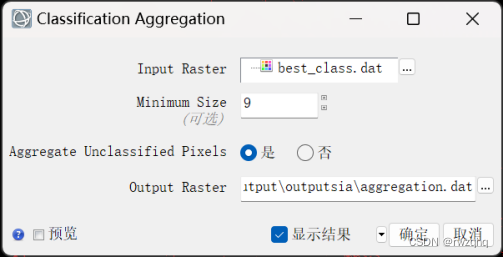
在Toolbox中,选择Classification/Post Classification/Classification Aggregation,在弹出的参数对话框中Input Raster选择分类后结果,Minimum Size和Aggregate Unclassified Pixels按照默认设置,设置输出路径点击OK,得到小图斑处理后结果。
5.1.2主次要分析
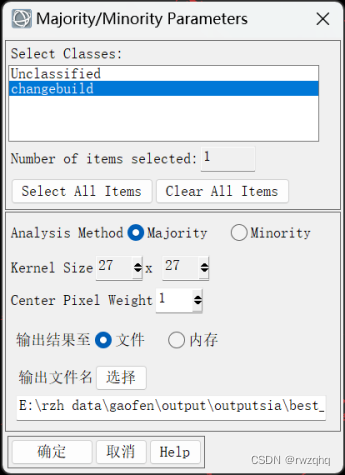
在Toolbox中,选择Classification/Post Classification/Majority/Minority Analysis,选择上一步的输出文件,在弹出的参数设置对话框中选择变化类别,Analysis Method默认Majority进行主要分析,Kernel Size设置为27×27,其他参数按照默认,设置结果输出路径点击OK,得到主要分析处理结果。
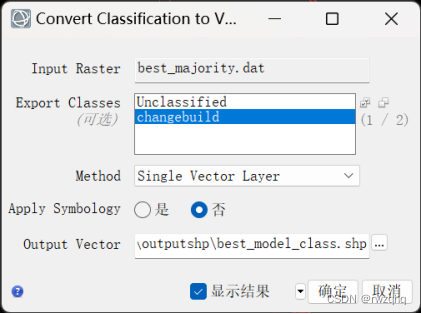
5.2分类栅格转矢量
在Toolbox中,选择Classification/Post Classification/Classification to Vector将分类栅格转为矢量。选择上一步的输出结果,在弹出的对话框中,Export Classes选择变化类别,其他参数默认,设置输出路径点击OK,得到结果。
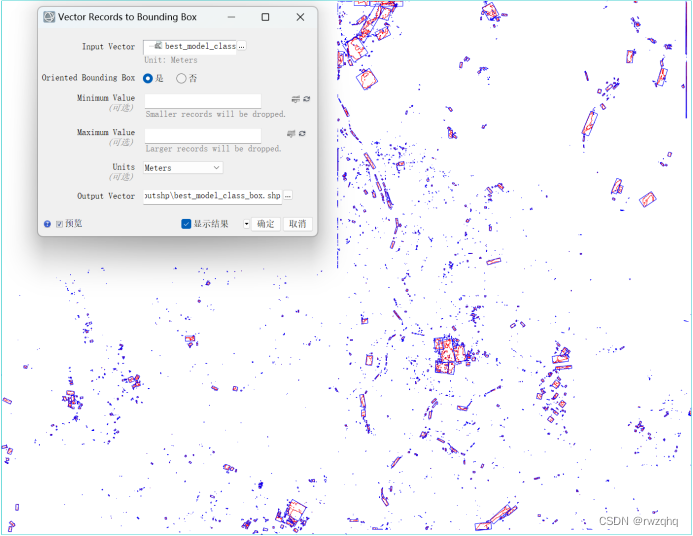
5.3生成最小外接矩形
在Toolbox中选择Vector/Vector to Bounding Box,在弹出的对话框中选择上一步输出的矢量,Oriented Bounding Box选择Yes,根据图斑边界生成最小外接矩形,设置文件输出路径点击OK,得到最终结果为变化区域范围矢量。