
- 1用GVIM/VIM写Verilog——VIM配置分享_gvim svstemverilog 插件
- 2深度学习之RNN循环神经网络(理论+图解+Python代码部分)
- 3数据流分析(一)_数据流分析怎么写
- 4python 之弗洛伊德算法_floyd-warshall算法python代码
- 5FPGA 静态时序分析与约束(2)_quartus unconstrained path
- 6微信小程序开发与应用——字体样式设置_微信小程序style属性
- 7多无人机对组网雷达的协同干扰问题 数学建模
- 8Python实现mysql数据库验证_python3 构建一个源和目的都是mysql的数据校验程序
- 9Win10安装安卓模拟器入坑记_exagear win10
- 10岛屿数量(dfs)
STM32智能小车项目_stm32控制小车前进后退的代码
赞
踩
实现的功能:
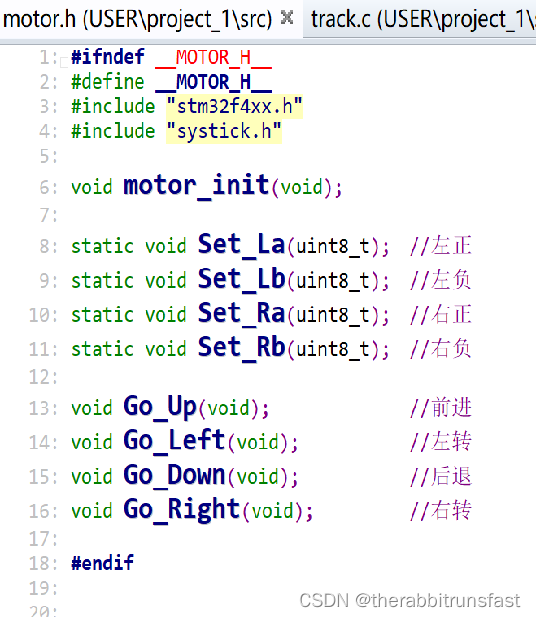
a.小车运动:小车的前进,后退,左转,右转,停止。
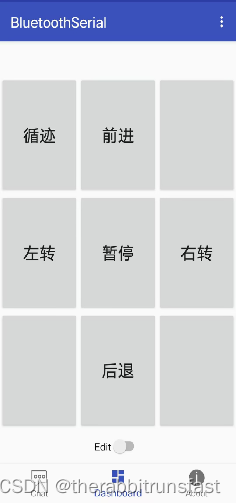
b.蓝牙控制:手机通过蓝牙向开发板发送运动指令,驱动小车进行相应的运动。
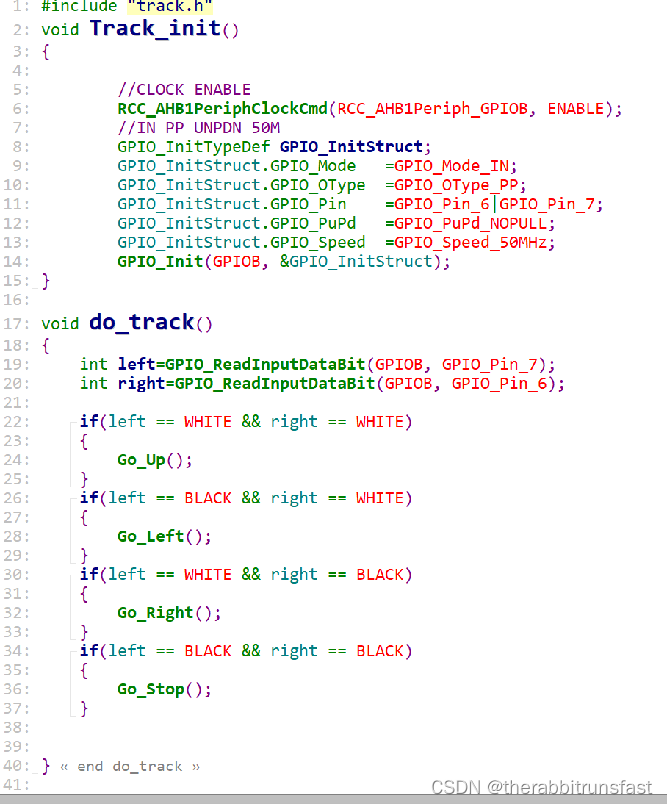
c.自动循迹:小车通过红外探测灯来检测地面的反射光,控制方向,沿着轨迹行驶。
小车的配置: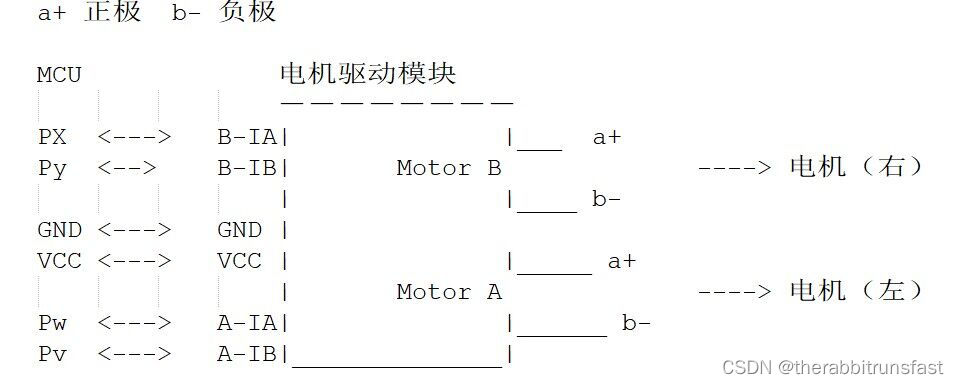
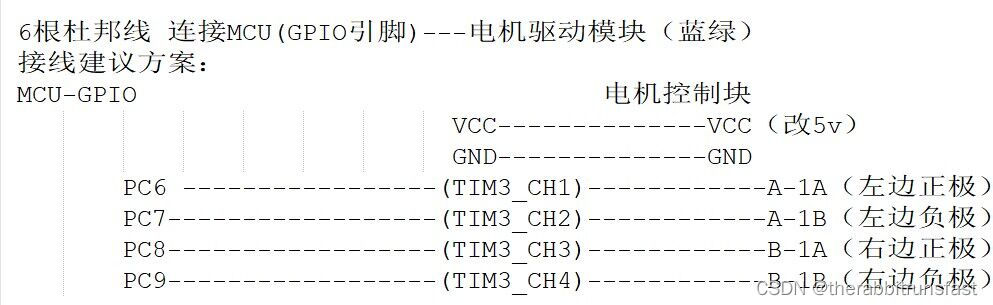
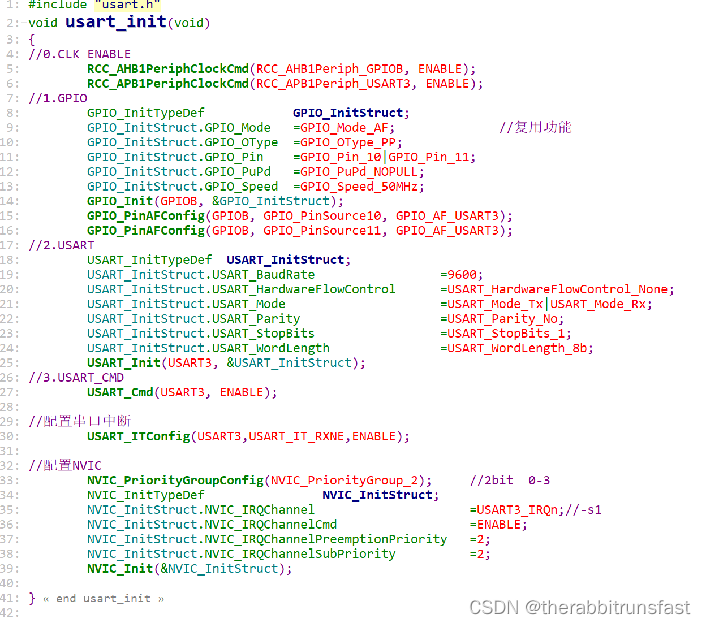
蓝牙配置:
注意:蓝牙TX-----开发板usart 3-RX ,蓝牙RX-----开发板usart 3-TX
红外调试:
白色地面---低电平---0--亮
黑色地面---高电平---1--不亮
D1------Right------PB6
D4-------Left-------PB7
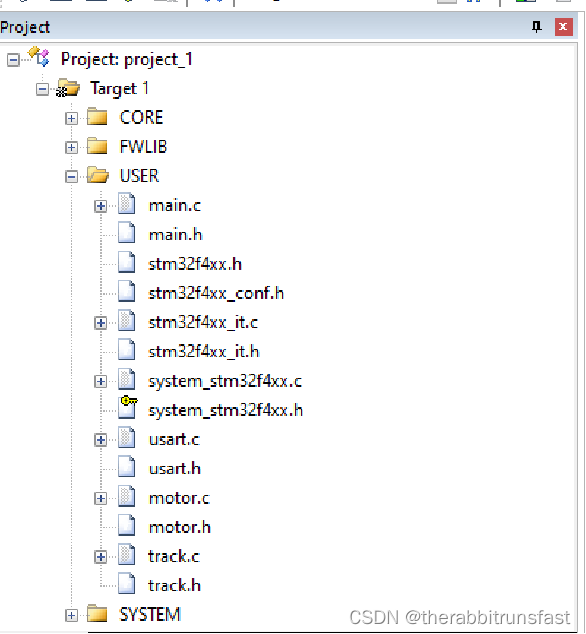
项目结构:
部分代码实现:
问题与解决方案:
1.代码无误的情况下,小车的左右轮不转。------- 使用的电压较小,之后换成了5v的电压。
2.更换电压后,小车的左轮依旧不转。 --------发现左部的马达突出,将马达推进,带动齿轮旋转。
3.先前调整好的红外探测灯,一段时间后不灵敏。 --------光线与位置的变化会影响红外探测灯。
4.小车前进过程中,左右轮速度不一样,导致无法直行。 -------小车速度太快,导致红外探测灯不能
5.及时探测,使得小车偏离轨道。 使用延时来调整小车的运行速度。------使用延时来降低某一边轮子的速度。
6.蓝牙控制小车存在一定的问题,主要表现为蓝牙连接不稳定 -------拔掉电源,重新连接。
学习心得:
学习原理与实践:在实验中,我们重点学习了 STM32 单片机的智能小车项目的设计原理和方法,还学习了如何通过单片机控制电机、传感器等硬件设备,从而实现小车的运动、蓝牙控制和红外自动循迹等功能。
联想现实中的创新:这不仅是一次实践性的学习,更是帮助我们深入了解单片机在智能控制方面的应用。例如,我们可以将智能小车应用于物流和配送领域,实现自动路径规划和货物装卸等功能;还可以将智能小车与人工智能、机器人等技术相结合,实现更加智能化的控制和应用。


