
- 1python高阶函数map_python高阶函数-map、reduce、filter
- 2Mysql yum安装教程_从mysql官方网站下载mysql的域名repository
- 3超详解| Yolov8模型手把手调参 | 配置 | 模型训练 | 验证 | 推理_yolo目标如何调参
- 4由于找不到msvcp100.dll,无法继续执行代码要如何处理?正确的msvcp100.dll修复
- 5git fetch, git pull与git rebase比较_git fetch git pull git rebase
- 6Medusa.js:构建现代化后台管理系统的利器
- 7Stack Overflow 封号潮,AI 知识版权战火升级;Mistral 融资估值 60 亿美元 | AI 头条...
- 8flask-11蓝图blueprint_flask blueprint
- 9Mysql的STR_TO_DATE与DATE_FORMAT函数_strtodate和dateformat
- 10海思QT开发系列(四):Hi3559 Qt+OpenGL移植_hisi3559 opengl
使用Kalibr标定zed mini双目相机_kalibr标定太慢
赞
踩
这篇文章介绍采用开源库Kalibr对zed mini双目相机的内外参进行标定,Kalibr在SLAM领域非常流行,因为他可以非常方便的对相机,IMU等传感器的内外参进行标定
1 Kalibr安装
Kalibr的官网:https://github.com/ethz-asl/kalibr
Kalibr是一个ros功能包,所以需要先安装ros
1.1 依赖安装
- sudo apt-get install -y \
- git wget autoconf automake nano \
- libeigen3-dev libboost-all-dev libsuitesparse-dev \
- doxygen libopencv-dev \
- libpoco-dev libtbb-dev libblas-dev liblapack-dev libv4l-dev
1.2 创建一个工作空间,下载Kalibr源码
- mkdir -p ~/kalibr_workspace/src
- cd ~/kalibr_workspace
- git clone https://github.com/ethz-asl/kalibr.git
1.3 编译
- cd ../
- catkin_make
2 标定板下载打印
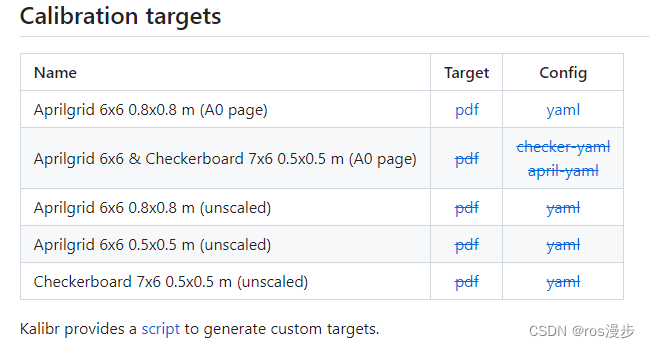
标定板下载网址:Downloads · ethz-asl/kalibr Wiki · GitHub
这里采用Aprilgrid,因为他比checkboard具有更多的优势,标定结果更准确,同时在下载页面,也只有Aprilgrid可以下载。
下载下来的Aprilgrid如下图所示,是A0大小,但是我们也可以采用更小的纸来打印,比如采用A4大小的纸张。
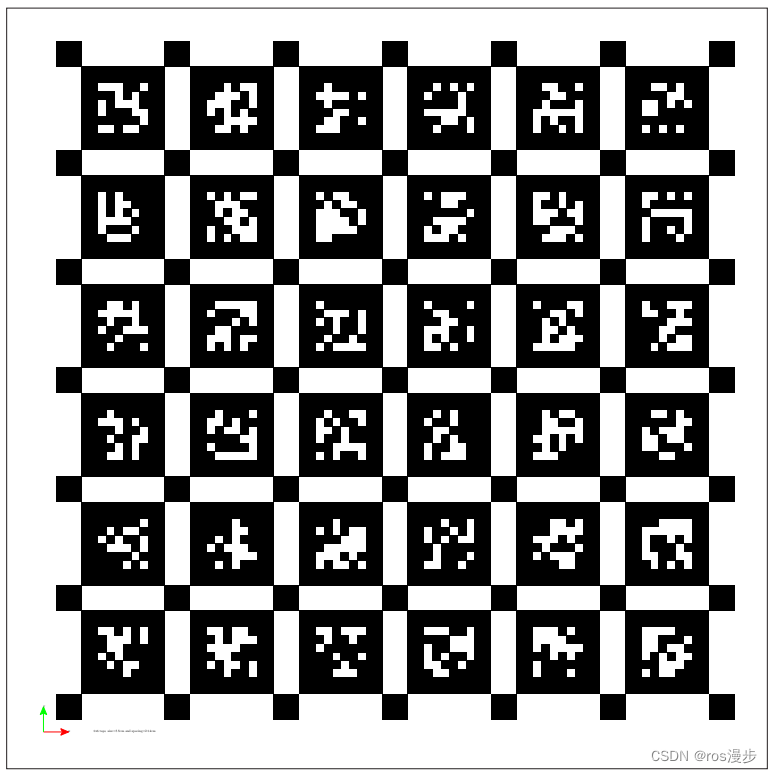
打印的Aprilgrid最好粘贴在一个硬平面上,方便后续的标定过程。
下载Aprilgrid的同时,也需要把Aprilgrid的配置文件下载下来,文件名一般是:
april_6x6_80x80cm.yaml,该文件的内容如下:
- target_type: 'aprilgrid' #gridtype
- tagCols: 6 #number of apriltags
- tagRows: 6 #number of apriltags
- tagSize: 0.088 #size of apriltag, edge to edge [m]
- tagSpacing: 0.3 #ratio of space between tags to tagSize
- codeOffset: 0 #code offset for the first tag in the aprilboard
其中:
- target_type:标定板的类型,这里是aprilgrid
- tagCols: apriltags的列数
- tagRows:apriltags的行数
- tagSize: 每个apriltags的边长,单位m
- tagSpacing: 介绍如下图所示
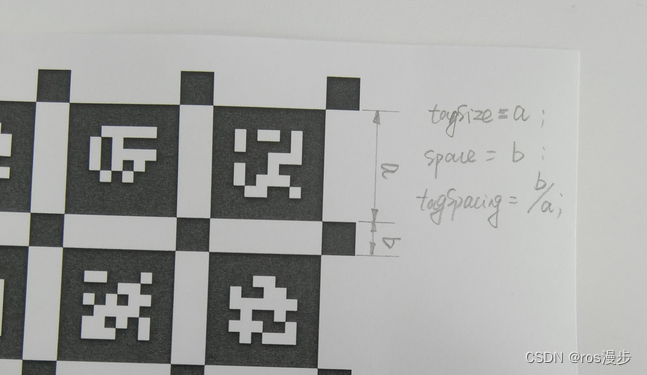
用A4纸打印的Aprilgrid量出来的tagSize=0.021m, tagSpacing=0.285714.
3 标定数据的录制
ZED双目相机的SDK是需要英伟达的GPU支持的,但是因为穷,买不起GPU,所以只能在CPU上使用ZED双目相机。幸运的是ZED是一个UVC标准的摄像头,使用Opencv即可读取图像。这里安装一个ros功能包zed_cpu_ros。
虽然我们没有CUDA,但是我们还是需要安装ZED的SDK,可以在stereo公司官网下载(需要魔法)。安装好SDK后,我们需要从/usr/local/zed/settings中将zed相机的标定文件.conf复制到zed_cpu_ros/config。.conf包含zed相机的内参,畸变系数,基线长度,双目矫正矩阵(以旋转适量的形式提供)等信息。zed_cpu_ros功能包会读取这个配置文件,然后将左右图像的相机信息发布出去。至此,我们就可以在CPU上使用ZED相机了。
将ZED相机通过USB3.0(只能是3.0接口,2.0根本识别不出来)接口连接到电脑后,在终端运行如下命令,读取和发布ZED的图像:
roslaunch zed_cpu_ros zed_cpu_ros.launch如果不出意外的话,肯定会发生意外
我们在运行zed_cpu_ros.launch之前还是需要看看他里面到底有啥
- <launch>
- <arg name="config_file_location" default="$(find zed_cpu_ros)/config/SN1267.conf"/>
- <arg name="camera_namespace" default="camera"/>
- <!-- to find your device name, use ls /dev/ and look for the name begin with video -->
- <arg name="device_name" value="/dev/video003"/>
- <arg name="resolution" default="1"/>
- <arg name="frame_rate" default="30"/>
- <arg name="show_image" default="false"/>
- <arg name="encoding" default="bgr8"/>
- <arg name="use_zed_config" default="true"/>
-
- <node pkg="zed_cpu_ros" type="zed_cpu_ros" name="zed_cpu_ros_node" output="screen" ns="$(arg camera_namespace)" required="true">
- <param name="resolution" value="$(arg resolution)" unless="$(eval resolution>3)"/>
- <param name="frame_rate" value="$(arg frame_rate)"/>
- <param name="config_file_location" value="$(arg config_file_location)"/>
- <param name="show_image" value="$(arg show_image)"/>
- <param name="left_frame_id" value="left_frame"/>
- <param name="right_frame_id" value="right_frame"/>
- <param name="use_zed_config" value="$(arg use_zed_config)"/>
- <param name="device_name" value="$(arg device_name)"/>
- <param name="encoding" value="$(arg encoding)"/>
- </node>
-
- <!-- <node pkg="tf" type="static_transform_publisher" name="static_tf_1" args="0.25 0 0.4 0 0 0 1 base_link left_frame 30"/> -->
- <!-- <node pkg="tf" type="static_transform_publisher" name="static_tf_2" args="0 0.120 0 0 0 0 1 left_frame right_frame 30"/> -->
-
- </launch>

这个文件里右几个参数需要设置。
- config_file_location: ZED相机配置文件
- device_name: 连接ZED后,通过命令:ls /dev/video*查看
- resolution: 图像分辨率,有4个等级
- frame_rate: 帧率,这里需要注意,因为Kalibr标定要求图像帧率不能太高,否则计算时间很长,推荐是4Hz。
设置好之后,再运行zed_cpu_ros.launch,即可用rviz查看发布的图像。
下面可以开始录制标定bag文件,固定相机,移动标定板。终端运行:
rosbag record -O Kalib_data_vga.bag /camera/left/image_raw /camera/right/image_raw标定板移动可以参考https://youtu.be/puNXsnrYWTY?t=57:
录制结束后会得到一个Kalib_data_vga.bag文件。
4 双目标定
rosrun kalibr kalibr_calibrate_cameras --bag Kalib_data_vga.bag --topics /camera/left/image_raw /camera/right/image_raw --models pinhole-radtan pinhole-radtan --target april.yaml 可添加–show-extraction,在标定过程中可以可视化角点检测情况是否良好。
标定完成后,会生成三个文件
- .yaml:保存着左右相机的内参,以及左相机到右相机的变换矩阵
- .pdf:保存着各种图,比如重投影误差图
- .txt:含有相机内参以及重投影误差
至此双目标定就结束了,可以将标定结果与ZED自带的标定做对比,评估标定的效果。后续就可以利用标定结果开展后续更有意思的工作了
5 错误记录
使用kalibr做相机内参标定时,报错:“ImportError: No module named igraph”
1、sudo apt-get install -y libigraph0-dev
2、pip install python-igraph==0.7.1.post6
(python2只支持0.8X以前的版本)

