
热门标签
热门文章
- 1华为鸿蒙HarmonyOS应用开发者高级认证答案_华为认证答案’
- 2阿维塔在车辆安全中的以攻促防实例 | 附PPT下载
- 3下载代码的一些命令-小记_quicinc
- 4Logistic模型
- 5正确解决can‘t connect to MySQL server on ip(10060)的解决办法异常的有效解决方法_can't connect to mysql server on 10060
- 6GIT远程仓库(随笔)
- 7win10下 docker 配置python pytorch深度学习环境_win10创建docker python
- 8Hive实战案例_hive多维统计分析案例实战
- 9软件架构模式之分层架构
- 10【博客89】考虑为你的inline函数加上static_inline 函数都加了static
当前位置: article > 正文
ros使用usb摄像头追踪ArUco markers
作者:菜鸟追梦旅行 | 2024-05-22 19:14:50
赞
踩
aruco marker
ros使用usb摄像头追踪ArUco markers
注意:在通过ros使用usb摄像头追踪ArUco markers之前,先进行相机的内参标定,否则会出现以下问题
Error: TF_NAN_INPUT: Ignoring transform for child_frame_id "aruco_marker_frame" from authority "unknown_publisher" because of a nan value in the transform (nan nan 0.000000) (nan nan nan nan) at line 244 in /tmp/binarydeb/ros-indigo-tf2-0.5.20/src/buffer_core.cpp
1. 下载安装aruco_ros
- 下载编译源码
mkdir -p ~/aruco_ws/src
cd ~/aurco_ws/src
git clone https://github.com/pal-robotics/aruco_ros.git
cd .. #回到目录 /aruco_ws
catkin_make install #编译
source devel/setup.bash
- 1
- 2
- 3
- 4
- 5
- 6
- 修改launch文件
修改single.launch文件,将图像和相机信息重新映射到usb_cam节点发布的主题:
(如果使用的是realsense相机或者其他相机,可以先查看相机对应的话题修改以下参数)
<remap from=”/camera_info” to=”/usb_cam/camera_info” />
<remap from=”/image” to=”/usb_cam/image_raw” />
- 1
- 2
适当修改相应的camera_frame,marker_frame,reference_frame,修改结果如下:
<launch> <arg name="markerId" default="582"/> <arg name="markerSize" default="0.034"/> <!-- in m --> <arg name="eye" default="left"/> <arg name="marker_frame" default="aruco_marker_frame"/> <arg name="ref_frame" default="usb_cam"/> <!-- leave empty and the pose will be published wrt param parent_name --> <arg name="corner_refinement" default="LINES" /> <!-- NONE, HARRIS, LINES, SUBPIX --> <node pkg="aruco_ros" type="single" name="aruco_single"> <remap from="/camera_info" to="/usb_cam/camera_info" /> <remap from="/image" to="/usb_cam/image_raw" /> <param name="image_is_rectified" value="True"/> <param name="marker_size" value="$(arg markerSize)"/> <param name="marker_id" value="$(arg markerId)"/> <param name="reference_frame" value="$(arg ref_frame)"/> <!-- frame in which the marker pose will be refered --> <param name="camera_frame" value="usb_cam"/> <param name="marker_frame" value="$(arg marker_frame)" /> <param name="corner_refinement" value="$(arg corner_refinement)" /> </node> </launch>

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
/camera_info: 填入相机的内参 topic,这个topic一般由启动相机的节点发布,例如我用的是 usb_cam 启动相机,他就会发布相机内参 topic。/image: 图片 topic,同样我的也是由 usb_cam 发布的,要填什么具体看你这个节点的名字。

reference_frame: marker 坐标系的参考坐标系,我们要获得的是marker 和相机的相对位姿,所以这里设置为相机坐标系,即和 camera_frame 一样。camera_frame: 相机坐标系,随便写个名字marker_frame:marker 坐标系,随便写个名字
2. 运行aruco_ros
- 打印ArUco markers
Dictionary:选择Original ArUco,不然可能识别不到
Marker ID:上面single.launch文件中的markerId
Marker size, mm:上面single.launch文件中的markerSize,注意单位
- 启动相机
roslaunch usb_cam usb_cam-test.launch #根据实际的相机启动文件名进行修改
- 1
- 启动aruco_ros检测Marker
cd ~/aruco_ws
source devel/setup.bash
roslaunch aruco_ros single.launch
- 1
- 2
- 3
- 启动窗口,可视化检测结果
查看aruco_ros发布的话题
rostopic list
- 1
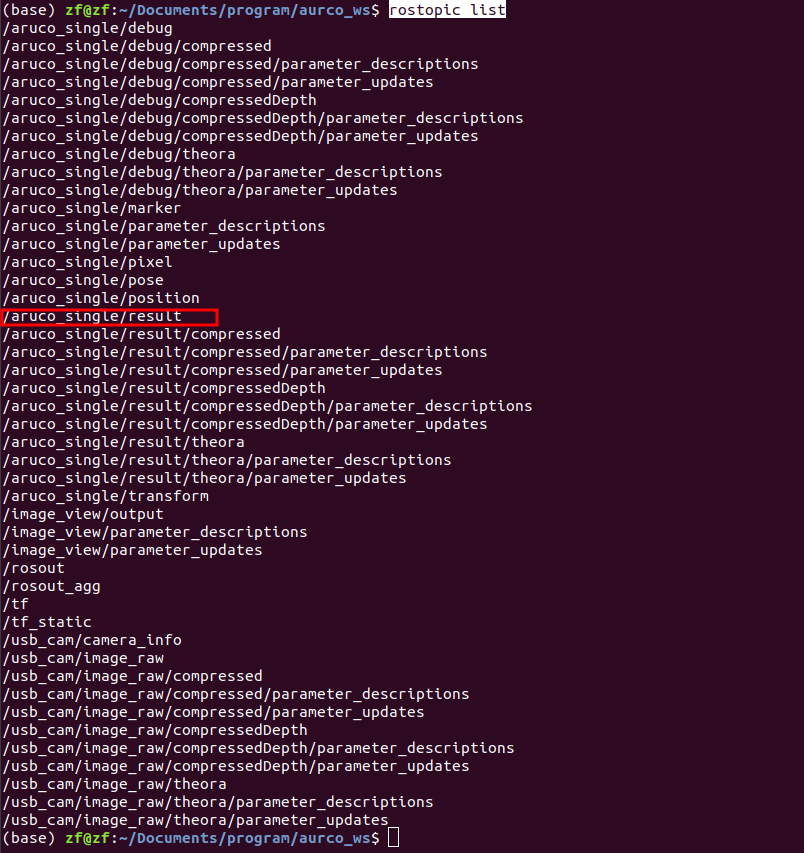
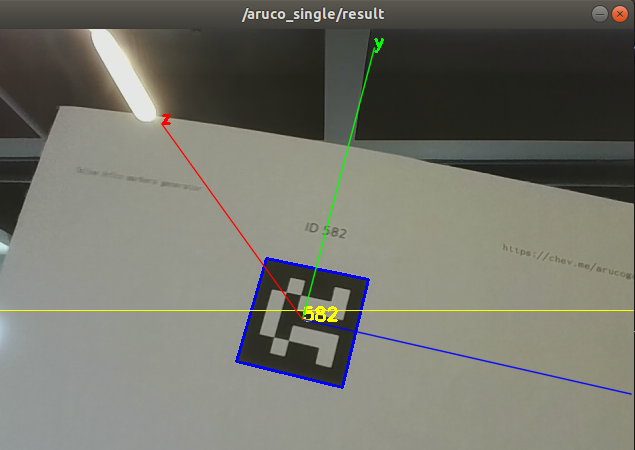
根据查看的话题订阅/aruco_single/result查看可视化结果
rosrun image_view image_view image:=/aruco_single/result
- 1
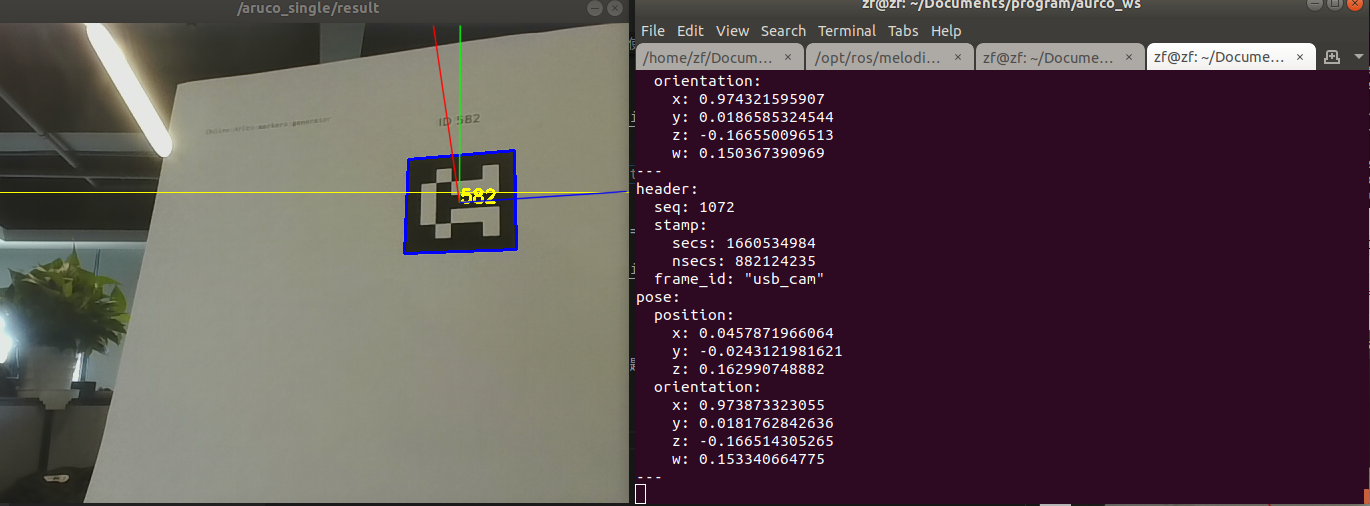
- 查看位姿
订阅/aruco_single/pose话题,并打印/marker_frame 在 /reference_frame 的位姿
rostopic echo /aruco_single/pose
- 1
收工
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/菜鸟追梦旅行/article/detail/609606
推荐阅读
相关标签

