
- 1HTML基础之表单提交_html 表单提交
- 2自然语言处理——基于预训练模型的方法——第4章 自然语言处理中的神经网络基础_自然语言如何跟多层感知器结合
- 318天1000万次迭代,AI生成的照片你能分辨真假吗?_图片ai迭代
- 4python:实现给定字符的ASCII值(附完整源码)_python 输出字符串的 ascii
- 5【正点原子STM32】Cortex-M系列介绍(ARM、Cortex、DMIPS/MHz和CoreMark/MHz*)_cortex-a72 coremark
- 6unity性能优化 模型、贴图、shader优化方法大全_unity compressionmethod
- 7【数据结构】单链表基本操作_单链表的基本操作
- 8SpringMVC ModelAndView跳转失效_modelandview forward到其他页面的controller时,数据数据丢失
- 9【华为OD机试真题】2024年C卷(python)-攀登者2_上山时,消耗相邻高度差两倍的体力,下坡时消耗相邻高度差一倍的体力,平地不消耗体
- 10学 Python 都用来干嘛的?
论文阅读 (79):TransMIL: Transformer based Correlated Multiple Instance Learning for Whole Slide Image
赞
踩
1 概述
1.1 题目
1.2 动机
WSI–MIL方法通常基于独立同分布假设,这忽略了不同实例之间的相关性。为了处理这个问题,提出了一个称为相关多示例的新框架。基于该框架,部署了一个基于Transformer的MIL (TransMIL),其能够同时探索形态和空间信息。
TransMIL可视化效果好、可解释性强,能够高效处理不平衡/平滑和二/多分类问题。实验验证了其性能及展示了收敛速度。

1.3 代码
Torch:https://github.com/szc19990412/TransMIL
1.4 附件
https://proceedings.neurips.cc/paper/2021/file/10c272d06794d3e5785d5e7c5356e9ff-Supplemental.pdf
1.5 引用
@article{Shao:2021:21362147,
author ={Zhu Chen Shao and Hao Bian and Yang Chen and Yi Feng Wang and Jian Zhang and Xiang Yang Ji and Yong Bing Zhang},
title ={{TransMIL}: {T}ransformer based correlated multiple instance learning for whole slide image classification},
journal ={Advances in Neural Information Processing Systems},
volume ={34},
pages ={2136--2147},
year ={2021}
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
2 方法
2.1 相关多示例
问题定义:以二分类MIL为例,给定包
X
i
=
{
x
i
,
1
,
x
i
,
2
,
…
,
x
i
,
n
}
\mathbf{X}_i=\{\boldsymbol{x}_{i,1},\boldsymbol{x}_{i,2},\dots,\boldsymbol{x}_{i,n}\}
Xi={xi,1,xi,2,…,xi,n},对于
i
=
1
,
…
,
b
i=1,\dots,b
i=1,…,b,这样的定义表明包类实例相互依赖且有一定顺序。实例标签
{
y
i
,
1
,
y
i
,
2
,
…
,
y
i
,
n
}
\{y_{i,1},y_{i,2},\dots,y_{i,n}\}
{yi,1,yi,2,…,yi,n}是未知的,包标签
Y
i
∈
{
0
,
1
}
Y_i\in\{0,1\}
Yi∈{0,1}是已知的。一个MIL二分类器可以被定义为:
Y
i
=
{
0
,
iff
∑
y
i
,
j
=
0
y
i
,
j
∈
{
0
,
1
}
,
j
=
1
…
n
1
,
otherwise
(1)
\tag{1} Y_i= \left\{
与Attention-net相比,进一步引入实例之间的相关性。定理1和推理给出了 S ( X ) S(\mathbf{X}) S(X)的任意形式,定理2说明了相关多示例的一些优势。
定理1 假设
S
:
X
→
R
S:\mathcal{X}\to\mathbb{R}
S:X→R是一个关于Hausdirff距离
d
H
(
⋅
,
⋅
)
d_H(\cdot,\cdot)
dH(⋅,⋅)的连续集合函数,对于任意的可逆图
P
:
X
→
R
n
P:\mathcal{X}\to\mathbb{R}^n
P:X→Rn,存在函数
σ
\sigma
σ和
g
g
g,使得对于任意的
X
∈
X
\mathbf{X}\in\mathcal{X}
X∈X有:
∣
S
(
X
)
−
g
(
P
X
∈
X
{
σ
(
x
∈
X
)
}
)
∣
<
ϵ
(3)
\tag{3} |S(\mathbf{X})-g(P_{\mathbf{X}\in\mathcal{X}}\{\sigma(\boldsymbol{x}\in\mathbf{X})\})|<\epsilon
∣S(X)−g(PX∈X{σ(x∈X)})∣<ϵ(3)即一个Hausdorff连续函数
S
(
X
)
S(\mathbf{X})
S(X)能够被
g
(
⋅
)
g(\cdot)
g(⋅)中的一个函数任意近似。
推理 基于定理1,对于任意的
X
\mathbf{X}
X有:
∣
S
(
X
)
−
g
(
P
X
∈
X
{
f
(
x
)
+
h
(
x
)
:
x
∈
X
}
)
∣
<
ϵ
(7)
\tag{7} |S(\mathbf{X})-g(P_{\mathbf{X}\in\mathcal{X}}\{f(\boldsymbol{x})+h(\boldsymbol{x}):\boldsymbol{x}\in\mathbf{X}\})|<\epsilon
∣S(X)−g(PX∈X{f(x)+h(x):x∈X})∣<ϵ(7)
定理2:包中的实例可以通过随机变量
Θ
1
,
Θ
2
,
…
,
Θ
n
\Theta_1,\Theta_2,\dots,\Theta_n
Θ1,Θ2,…,Θn表示,在相关假设下包的信息熵可以被表示为
H
(
Θ
1
,
Θ
2
,
…
,
Θ
n
)
H(\Theta_1,\Theta_2,\dots,\Theta_n)
H(Θ1,Θ2,…,Θn),包在独立同分布 (i.i.d.) 假设下的信息熵可以被表示为
∑
t
=
1
n
H
(
Θ
t
)
\sum_{t=1}^nH(\Theta_t)
∑t=1nH(Θt),则有:
H
(
Θ
1
,
Θ
2
,
…
,
Θ
n
)
=
∑
t
=
2
n
H
(
Θ
t
∣
,
Θ
1
,
…
,
Θ
t
−
1
)
+
H
(
Θ
1
)
≤
∑
t
=
1
n
H
(
Θ
t
)
(8)
\tag{8} H(\Theta_1,\Theta_2,\dots,\Theta_n)=\sum_{t=2}^nH(\Theta_t|,\Theta_1,\dots,\Theta_{t-1})+H(\Theta_1)\leq\sum_{t=1}^nH(\Theta_t)
H(Θ1,Θ2,…,Θn)=t=2∑nH(Θt∣,Θ1,…,Θt−1)+H(Θ1)≤t=1∑nH(Θt)(8)定理2证明了相关假设下有更小的信息熵,其可以减少不确定性和引入更多有用的信息。基于此,算法1展示了相关算法。图2展示了TransMIL与已有方法的主要区别。


图2:池化矩阵
P
\mathbf{P}
P的差异:(a) 假设一个WSI中有5个实例,
P
∈
R
5
×
5
\mathbf{P}\in\mathbb{R}^{5\times5}
P∈R5×5是相应的池化矩阵,对角线表示和自己的注意力权重,其余的为与其他实例的;(b-d) 均忽略了相关信息,因此
P
\mathbf{P}
P是对角矩阵;(b) 第一个实例通过最大池化选择,因此只有一个非零值;© 平均池化下对角线的值相等;(d) 注意力的引入使得对角线上的值出现变化;(e) 得益于相关假设,非对角线上的值表明了实例之间的相关性
2.2 Transformer应用到相关MIL
Transformer使用自注意力机制来建模一个序列中的所有token的相关性,并添加位置信息来增加序列顺序信息的有用性。因此,使用函数 h h h来编码所有实例的空间信息,以及 P \mathbf{P} P使用自注意力来汇聚信息的Transformer是很有用的。
Transformer MIL 给定一个包的集合 { X 1 , X 2 , … , X b } \{\mathbf{X}_1,\mathbf{X}_2,\dots,\mathbf{X}_b\} {X1,X2,…,Xb}及相应标签 Y i Y_i Yi,目的是习得一种映射 X → T → Y \mathbb{X}\to\mathbb{T}\to\mathcal{Y} X→T→Y,其中 X \mathbb{X} X是包空间、 Y \mathbb{Y} Y是Transformer空间。以及 Y \mathcal{Y} Y是标签空间。
X
→
T
\mathbb{X\to T}
X→T被定义为:
X
i
0
=
[
x
i
,
c
l
a
s
s
;
f
(
x
i
,
1
)
;
f
(
x
i
,
2
)
;
…
;
f
(
x
i
,
n
)
]
+
E
p
o
s
,
X
i
0
,
E
p
o
s
∈
R
(
n
+
1
)
×
d
(15)
\tag{15} \mathbf{X}_i^0=[\boldsymbol{x}_{i,class};f(\boldsymbol{x}_{i,1});f(\boldsymbol{x}_{i,2});\dots;f(\boldsymbol{x}_{i,n})]+\mathbf{E}_{pos},\qquad\mathbf{X}_i^0,\mathbf{E}_{pos}\in\mathbb{R}^{(n+1)\times d}
Xi0=[xi,class;f(xi,1);f(xi,2);…;f(xi,n)]+Epos,Xi0,Epos∈R(n+1)×d(15)
Q
ℓ
=
X
i
ℓ
−
1
W
Q
,
K
ℓ
=
X
i
ℓ
−
1
W
K
,
V
ℓ
=
X
i
ℓ
−
1
W
V
,
ℓ
=
1
…
L
(16)
\tag{16} \mathbf{Q}^\ell=\mathbf{X}_{i}^{\ell-1}\mathbf{W}_Q,\quad\mathbf{K}^\ell=\mathbf{X}_{i}^{\ell-1}\mathbf{W}_K,\quad\mathbf{V}^\ell=\mathbf{X}_{i}^{\ell-1}\mathbf{W}_V,\qquad\ell=1\dots L
Qℓ=Xiℓ−1WQ,Kℓ=Xiℓ−1WK,Vℓ=Xiℓ−1WV,ℓ=1…L(16)
h
e
a
d
=
SA
(
Q
ℓ
,
K
ℓ
,
V
ℓ
)
=
softmax
(
Q
ℓ
(
K
ℓ
)
T
d
q
)
V
ℓ
,
ℓ
=
1
…
L
(17)
\tag{17} \mathbf{head}=\text{SA}(\mathbf{Q}^\ell,\mathbf{K}^\ell,\mathbf{V}^\ell)=\text{softmax}\left(\frac{\mathbf{Q}^\ell(\mathbf{K}^\ell)^T}{\sqrt{d_q}}\right)\mathbf{V}^\ell,\qquad\ell=1\dots L
head=SA(Qℓ,Kℓ,Vℓ)=softmax(dq
Qℓ(Kℓ)T)Vℓ,ℓ=1…L(17)
MSA
(
Q
ℓ
,
K
ℓ
,
V
ℓ
)
=
Concat
(
h
e
a
d
1
,
h
e
a
d
2
,
…
,
h
e
a
d
h
)
W
O
,
ℓ
=
1
…
L
(18)
\tag{18} \text{MSA}(\mathbf{Q}^\ell,\mathbf{K}^\ell,\mathbf{V}^\ell)=\text{Concat}(\mathbf{head}_1,\mathbf{head}_2,\dots,\mathbf{head}_h)\mathbf{W}^O,\qquad\ell=1\dots L
MSA(Qℓ,Kℓ,Vℓ)=Concat(head1,head2,…,headh)WO,ℓ=1…L(18)
X
i
ℓ
MSA(LN
(
X
i
ℓ
−
1
)
)
+
X
i
ℓ
−
1
,
ℓ
=
1
…
L
(19)
\tag{19} \mathbf{X}_i^\ell\text{MSA(LN}(\mathbf{X}^{\ell-1}_i))+\mathbf{X}_i^{\ell-1},\qquad\ell=1\dots L
XiℓMSA(LN(Xiℓ−1))+Xiℓ−1,ℓ=1…L(19)其中SA表示自注意力、
L
L
L是MSA的数量、
h
h
h是每个MSK中头的数量,以及
L
N
LN
LN是标准化层。
T
→
Y
\mathbb{T}\to\mathcal{Y}
T→Y被定义为:
Y
i
=
MLP(LN
(
(
X
i
L
)
(
0
)
)
)
(20)
\tag{20} Y_i=\text{MLP(LN}((\mathbf{X}_i^L)^{(0)}))
Yi=MLP(LN((XiL)(0)))(20)其中
(
X
i
L
)
(
0
)
(\mathbf{X}_i^L)^{(0)}
(XiL)(0)表示类别token。
T
→
Y
\mathbb{T}\to\mathcal{Y}
T→Y可以通过类别token或者全局池化完成。然而,目前直接在WSI中使用Transformer相对困难,因此包中的实例数量很多且变化巨大。因此接下来注重如何高效地部署Transformer。
2.3 TransMIL用于弱监督WSI分类
为了更好地描述 X → T \mathbb{X\to T} X→T,设计了包含两个Transformer层的TPT模块和一个位置编码层,其中Transformer层用于汇聚形态信息,金字塔位置编码生成器 (Pyramid position encoding generator, PPEG) 用于编码空间信息。TransMIL的总体架构如图3。

图3:TransMIL架构。每个WSI被裁剪为多个区块 (背景被抛弃),并通过ResNet50嵌入为特征向量,然后传递给TPT处理:1) 序列平方;2) 序列的相关性建模;3) 条件位置编码和信息融合;4)深度特征汇聚;5)
T
→
Y
\mathbb{T}\to\mathcal{Y}
T→Y映射
2.3.1 使用TPT对长实例序列建模
序列来自于WSI的特征向量。TPT的的处理过程如算法2。

大多数情况下,用于视觉任务的Transformer中的softmax是按行处理的。而标准的自注意力机制需要计算每一对toekn之间的相似性得分,太慢太耗内存。为了处理WSI中的长实例序列问题,TPT中的softmax使用Nystrom方法。近似自注意力机制
S
^
\hat{\mathbf{S}}
S^被定义为:
S
^
=
softmax
(
Q
K
~
T
d
q
)
(
softmax
(
Q
~
K
~
T
d
q
)
)
+
softmax
(
Q
~
K
T
d
q
)
(9)
\tag{9} \hat{S}=\text{softmax}\left(\frac{\mathbf{Q}\tilde{\mathbf{K}}^T}{\sqrt{d_q}}\right)\left(\text{softmax}\left(\frac{\tilde{\mathbf{Q}}\tilde{\mathbf{K}}^T}{\sqrt{d_q}}\right)\right)^+\text{softmax}\left(\frac{\tilde{\mathbf{Q}}{\mathbf{K}}^T}{\sqrt{d_q}}\right)
S^=softmax(dq
QK~T)(softmax(dq
Q~K~T))+softmax(dq
Q~KT)(9)其中
Q
~
\tilde{\mathbf{Q}}
Q~和
K
~
\tilde{\mathbf{K}}
K~是从
Q
\mathbf{Q}
Q和
K
\mathbf{K}
K中的
n
n
n维序列中选择的
m
m
m个landmark,以及
A
+
\mathbf{A}^+
A+是
A
\mathbf{A}
A的Moore-Penrose伪逆。最终的时间复杂度将从
O
(
n
2
)
O(n^2)
O(n2)降为
O
(
n
)
O(n)
O(n)。由此,TPT可以满足包中实例很多的情况。
2.3.2 PPEG位置编码
在 WSI 中,由于载玻片和组织的可变大小,相应序列中的标记数量通常会有所不同。有研究表明,添加零填充可以为卷积提供绝对位置信息。受此启发设计了PPEG模块,相应的伪代码如算法3。
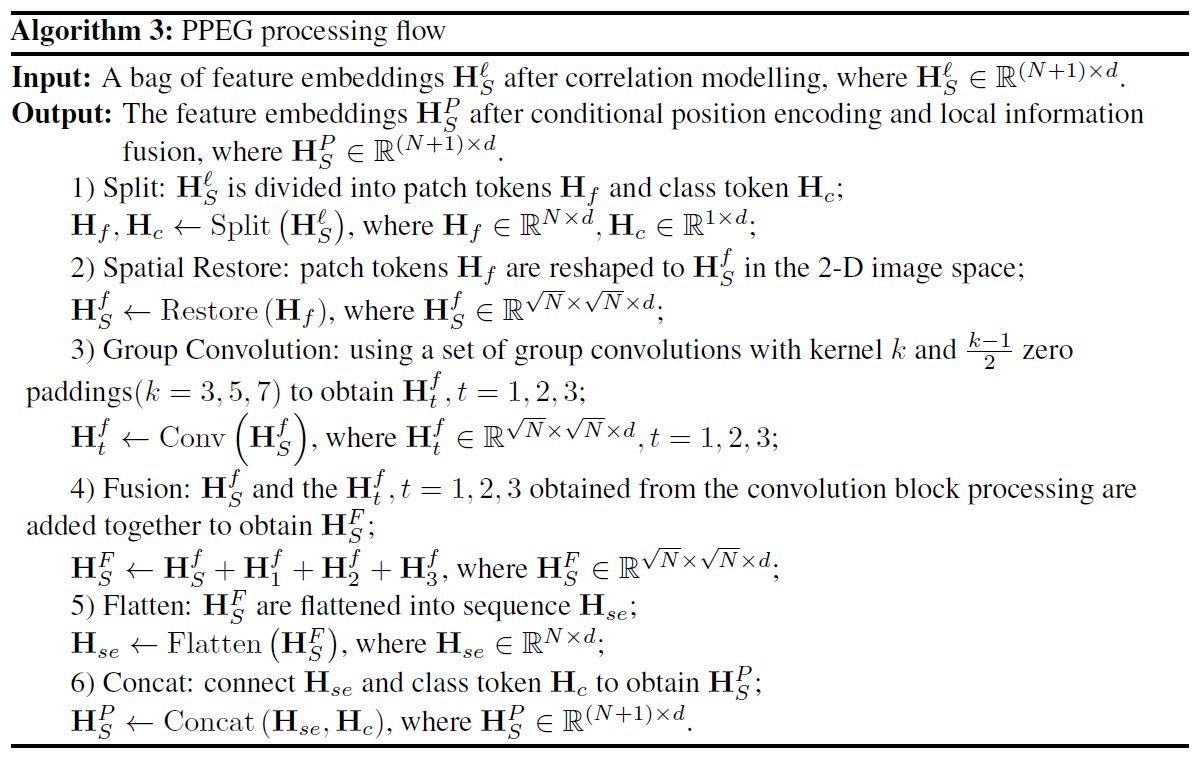
PPEG模块有以下优势:
- 同一层使用了不同大小的卷积核,可以编码不同粒度的位置信息,以扩展PPEG的能力;
- 可以获取序列中token的全局信息和上下文信息,这能够丰富每个token的特征。
3 实验及结果
3.1 数据集
- CAMELYON16:用于乳腺癌转移检测的公开数据集,包含270个训练集和130个测试集。预处理后有大约350万个区块,量级为 × 20 \times20 ×20,每个包平均有8800个。
- TCGA-NSCLC:包含两个子类,TGCA-LUSC和TCGA-LUAD,共993个诊断WSI,包含444种情形的507个LUAD和452种情况的486个LUSC。预处理后,每个包量级在 × 20 \times20 ×20的区块平均为15371。
- TCGA-RCC:包含三个子类,THCA-KICH、TCGA-KIRC,以及TCGA-KIRP,共884个WSI,三个子类的情形数分别为99、483,以及264,幻灯片数则111、489,以及284.预处理后平均为14627。
3.2 实验设置和度量指标
- 每个WSI的裁剪为 256 × 256 256\times256 256×256的无交叠区块,饱和度 < 15 <15 <15的背景将被抛弃;
- CAMELYON16的训练集划分10%作为验证集;
- TCGA划分时,首先确保训练和测试集中不存在来自一名患者的不同幻灯片,然后训练:验证:测试= 60 : 15 : 25 60:15:25 60:15:25;
- 准确率和AUC作为评估指标,其中准确率附加计算阈值 0.5 0.5 0.5;
- CAMELYON16使用测试AUC;
- TCGA-NSCLC使用平均AUC;
- TCGA-RCC使用macro-averaged AUC;
- TCGA使用4折交叉验证。
3.3 实现细节
- 交叉熵损失;
- Lookahead优化器,学习率 = 2 e − 4 =2e-4 =2e−4,权重衰减 = 1 e − 5 =1e-5 =1e−5;
- 批次大小 = 1 =1 =1;
- 每个区块通过ResNet50嵌入为1024维向量,在训练时通过全连接层降维到 512 512 512;
- 包的最终嵌入为 H i ∈ R n × 512 \mathbf{H}_i\in\mathbb{R}^{n\times512} Hi∈Rn×512;
- softmax用于标准化每个类别的预测得分。
3.4 基准线
- 注意力网络ABMIL和PT-MTA;
- 非定位注意力DSMIL;
- 单注意力CLAM-SB;
- 多头CLAM-MB;
- 循环神经网络MIL-RNN。
3.5 结果
分类:


消融实验:

可视化:

收敛性:


