
热门标签
热门文章
- 1VS code 进行python远程运行与调试以及简单可视化变量_python image preview
- 2HTTPS加密机制SSL详解_ssl加密访问机制
- 3如何使用最简单的方式实现flash的掉电保护和磨损均衡_flashdb掉电保护
- 4AITM2-0002 12s或60s垂直燃烧试验
- 5Android开发高级进阶之Android开发艺术探索笔记重要知识点
- 6防火墙以及路由器和交换机的安装,调试以及维护工作的详细说明方法?_亚信防火墙 怎么调试
- 7Anaconda卡在loading application_anaconda loading application
- 803.查看 SVN 账号密码_svn账号密码存放位置
- 9区块链学习5-长安链并发测试(3)_发送并发交易请求
- 10mysql: [Warning] Using a password on the command line interface can be insecure.
当前位置: article > 正文
【ROS2机器人入门到实战】RVIZ2_ros2 rviz
作者:菜鸟追梦旅行 | 2024-06-04 00:42:23
赞
踩
ros2 rviz
4. RVIZ2
写在前面
- 当前平台文章汇总地址:ROS2机器人从入门到实战
- 获取完整教程及配套资料代码,请关注公众号<鱼香ROS>获取
- 教程配套机器人开发平台:两驱版| 四驱版
- 为方便交流,搭建了机器人技术问答社区:地址 fishros.org.cn
本节我们来说一说,机器人开发中常用的数据可视化工具RVIZ2。
1.RVIZ2是什么
RVIZ2是ROS2中的一个非常重要且常用的数据可视化工具。
那数据指的是什么数据?可视化又是怎么可视化的?RVIZ2又是如何实现不同数据的可视化的呢?
答案如下:
- 数据:各种调试机器人时常用的数据,比如:图像数据、三维点云数据、地图数据、TF数据,机器人模型数据等等
- 可视化:可视化就是让你直观的看到数据,比如说一个三维的点(100,100,100),通过RVIZ可以将其显示在空间中
- 如何做到不同数据的可视化:强大的插件,如果没有你的数据,你可以自己再写一个插件,即插即用,方便快捷
注意:RVIZ强调将数据可视化出来,是已有数据的情况下,把数据显示出来而以,而我们后面要讲的gazebo仿真软件是通过模拟真实环境产生数据,两者用途并不一样。
2.RVIZ2 基础配置
2.1 全局配置
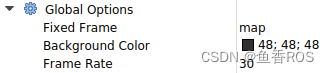
- Fixed Frame:所有帧参考的帧的名称,坐标都是相对的,这个就是告诉RVIZ你是相对谁的,一般是设置成map或者odom
- Frame Rate:用于设置更新 3D 视图的最大频率。
2.2 网格
用于可视化通常与地板平面相关联的网格
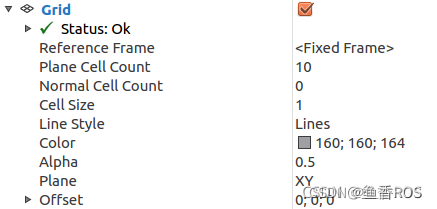
- Reference frame:帧用作网格坐标参考(通常:<fixed_frame>)
- Plane cell count: 单元格中网格的大小
- Normal cell count:在沿垂直于叶栅平面的网格数(正常:0)
- Cell size:每个网格单元的尺寸(以米为单位)
- Plane:标识网格平面的两个轴
2.3 机器人模型
根据 URDF 模型的描述来可视化机器人的模型。
- Visual enabled: 启用/禁用模型的 3D 可视化
- Description Source:机器人模型文件的来源,可以在File和Topic之间进行选择
- Description Topic: 机器人模型文件所在的话题
2.4 TF
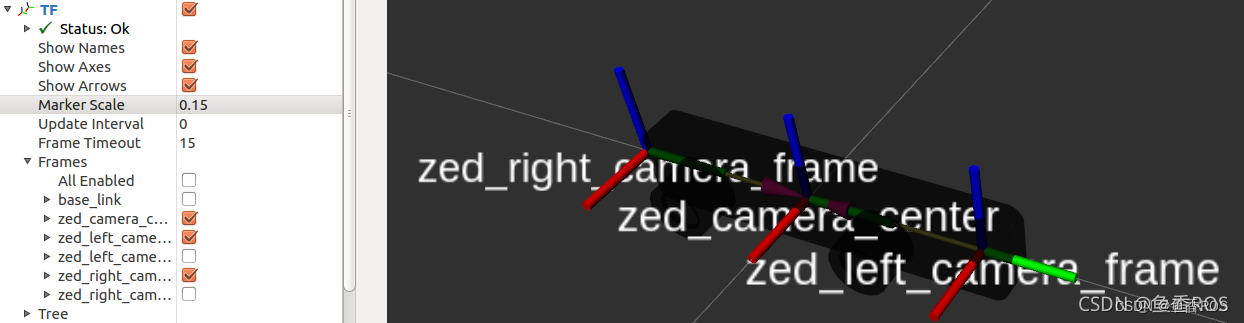
可视化构成 TF 广播的所有帧的位置和方向
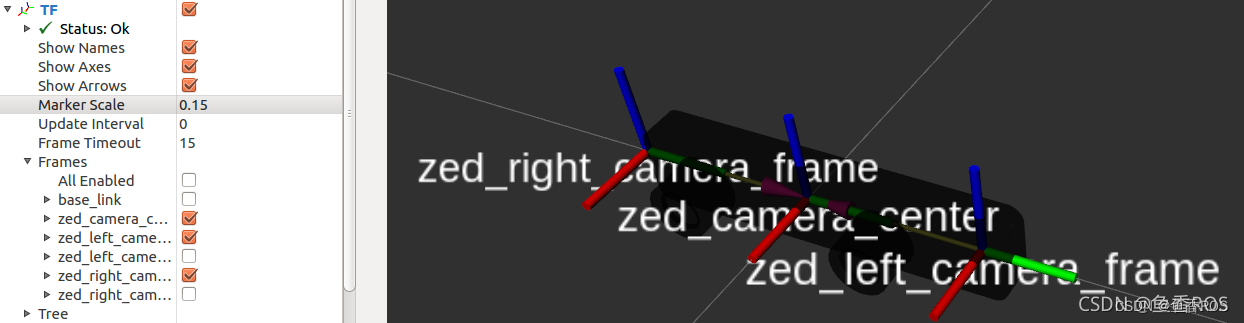
- Marker Scale: 将字和坐标系标识调整的小一些,使其更加可见且不那么混乱
- Update interval:以秒为单位的TF广播更新时间
最佳实践,勾选你想看的Frames,直观的看到两个坐标之间的关系
3.总结
看完之后是不是还挺不明所以的,因为大多插件都是和坐标相关的,这个要大家学习了下一章节机器人学和URDF建模之后就非常的清晰了
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/菜鸟追梦旅行/article/detail/669619
推荐阅读
相关标签

