
- 1判断两个链表是否相交并找出交点_两个链表相交,找出交点
- 2GIt和GitHub入门到精通_git github入门
- 3linux swap交换分区_linux mem和swap
- 4今年的“金三银四”好像没了?_金三银四不行了,2024年最新阿里HarmonyOS鸿蒙开发面试解答
- 5AI大模型应用开发实践:1.Embedding的初次窥探_embedding ai
- 6Windows Docker 部署 Firefly III 开源记账软件
- 7C++类设计和实现的十大最佳实践
- 8小剧场追剧付费短剧影视小程序源码含代理及会员收益模式小视频系统Thinkphp+Uniapp_2024短剧系统|追剧影视小程序|付费短视频小剧场|带支付收益等模式app源码
- 9拼多多招收java开发的三轮面试题,你能撑到第几轮?_拼多多java社招面试
- 10画论78 王概《芥子园画传》_芥子园画传原文译文
自行走机器人系统常用的技术栈_ros是 技术栈吗
赞
踩

前言
由于就职于一家AI机器人及工业检测相关的公司,就对当前相关联的技术栈有一个大致的了解。本人是Java后端服务开发岗,之前互联网公司经历,但对机器人这块比较好奇,所有只做了相关的了解。
基础技术栈
pcb设计 ad编辑工具
外观设计,三维建模,solidworks工具
arduino,c/c++二次开发,运行于ubuntu
Snowboy,KITT.AI开发的人工智能软件工具包。Snowboy 能够让人们轻松地将语音控制功能添加到自己的硬件设备上
jieba "结巴"中文分词:最好的Python中文分词组件
ROS是用于编写机器人软件程序的机器人系统架构
moveit是ros中一系列移动操作的功能包的组成,主要包含运动规划,碰撞检测,运动学,3D感知,操作控制等功能
用moveit控制机器人大概分以下几步:
- a.建立机器人URDF模型
- b.建立机器人ros驱动
- c.生成moveit配置文件
- d.标定相机
- e.修改moveit配置文件和launch文件
其中在进行仿真操作过程中,不需要b,d,e三个步骤
WEBRtc谷歌使用C++开源跨操作系统的实时音视频软件,方便二次开发集成类似QQ微信的摄像头和语言通信基础软件
TensorFlow :视觉障碍物,人脸识别等机器学习框架
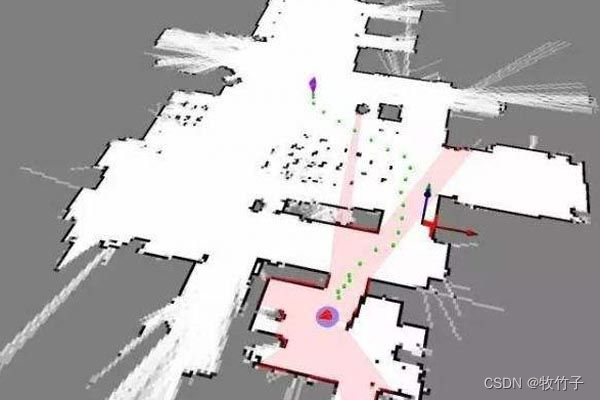
SLAM是同步定位与地图构建(Simultaneous Localization And Mapping)的缩写,最早由Hugh Durrant-Whyte 和 John J.Leonard提出。SLAM主要用于解决移动机器人在未知环境中运行时定位导航与地图构建的问题
测距单元包括激光测距、超声波测距以及图像测距三种,其中,激光测距是最为常用的方式。通常激光测距单元比较精确、高效并且其输出不需要太多的处理。其缺点在于价格一般比较昂贵(目前已经有一些价格比较便宜的激光测距单元)。激光测距单元的另外一个问题是其穿过玻璃平面的问题。另外激光测距单元不能够应用于水下测量。
另外一个常用的测距方式是超声波测距。超生波测距以及声波测距等以及在过去得到十分广泛的应用。相对于激光测距单元,其价格比较便宜;但其测量精度较低。激光测距单元的发射角仅0.25°,因而,激光基本上可以看作直线;相对而言,超声波的发射角达到了30°,因而,其测量精度较差。但在水下,由于其穿透力较强,因而,是最为常用的测距方式。最为常用的超声波测距单元是Polaroid超声波发生器。
第三种常用的测距方式是通过视觉进行测距。传统上来说,通过视觉进行测距需要大量的计算,并且测量结果容易随着光线变化而发生变化。如果机器人运行在光线较暗的房间内,那么视觉测距方法基本上不能使用。但最近几年,已经存在一些解决上述问题的方法。一般而言,视觉测距一般使用双目视觉或者三目视觉方法进行测距。使用视觉方法进行测距,机器人可以更好的像人类一样进行思考。另外,通过视觉方法可以获得相对于激光测距和超声波测距更多的信息。但更过的信息也就意味着更高的处理代价,但随着算法的进步和计算能力的提高,上述信息处理的问题正在慢慢得到解决。
使用激光测距方法进行距离测量。其可以很容易实现较高的测量精度并且很容易应用于SLAM中。


