
热门标签
热门文章
- 1在Windows11系统中安装pyCharm Community_win11 pycharm安装
- 2【转载】——KVM_cirros-0.3.4-x86_64-disk.img
- 3【Codeforces】1120 Round #543 Div. 1 B-F简要题解_e. the very same munchhausen
- 4Bat shell 脚本相关查询记录
- 5js字符串转函数_js 字符串转函数
- 6Vue3 第三十二篇:常用组件:Tab栏_vue3 tab
- 7Python调用外部程序的9种方式,你都知道吗?_python启动其他程序
- 8开源轻量堡垒机——Teleport的安装配置和使用_teleport radmin
- 9Kafka系列之:Unexpected handshake request with client mechanism PLAIN, enabled mechanisms are []
- 10编写一个完整的程序,运行时向用户提问“试考了多少分?(0~100)”输入后判断其等级显示出来。_运行时向用户提问你考试考了多少分
当前位置: article > 正文
RCS系统之:机器人状态
作者:菜鸟追梦旅行 | 2024-02-09 10:34:19
赞
踩
RCS系统之:机器人状态

在设计RCS系统平台时,机器人总共设计状态有:
- 离线模式; 如图,18号机器人呈灰黑色,表示机器人没有上电状态

- 工作模式; 如图,10号机器人成绿色,表示机器人处于工作模式,等待上游发送任务;

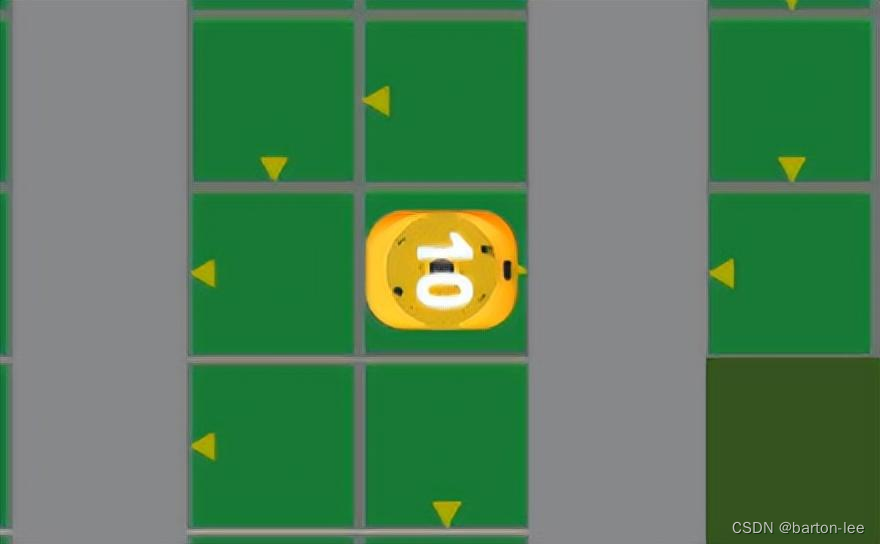
- 手动模式; 如图,10号机器人成黄色,表示机器人不接受上游发送的任务,只接受用户手动发送的任务,或者动作;
- 工程模式;如下图,10号机器人处于紫色,表示机器人处于工程模式,这种状态下,机器人可以允许硬件更新或者检测等;可以通过UI给机器人发送微移动等动作

- 错误/急停模式; 表示机器人运行过程上报了错误,机器人呈现红色;

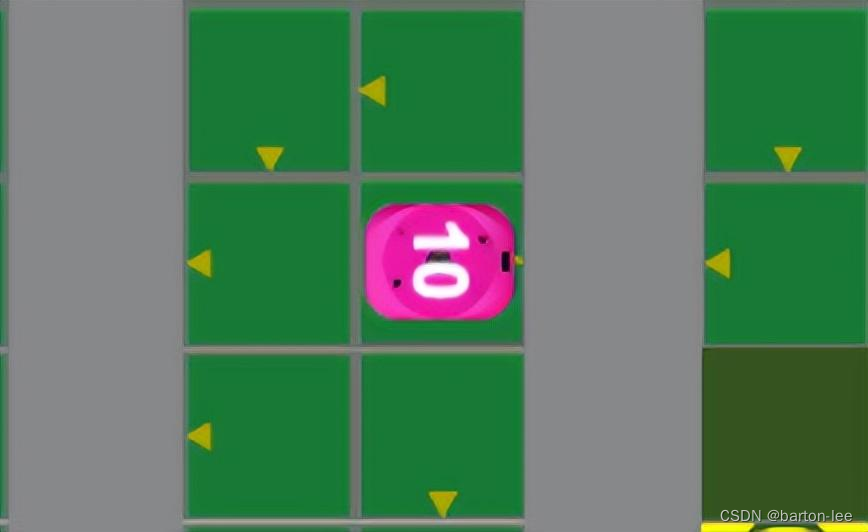
- 软停模式;表示机器人软停状态,一般是机器人在执行任务过程中,因为某种原因卡住在这个位置无法移动,如路线无法计算出来,或发送移动指令,机器人逻辑问题无法移动等等。最终呈现粉红色,让用户快速定位异常机器人;
- 充电模式;机器人连接到充电桩时,机器人显示闪电图标,表示机器人正在充电

欢迎大家提出宝贵建议,一起交流!
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/菜鸟追梦旅行/article/detail/71401
推荐阅读
相关标签

