
- 1基础数论之素数筛【C++算法竞赛】_c+数论基础 统计素数
- 2如何使用 pyhttptest 测试 RESTful API
- 3【实用技能】QGIS软件中山体水系底图效果的参数设置_qgis 底图
- 4python文件处理-Excel自动处理(使用 openpyxl)_openpyxl 列名
- 5以十年维度思考技术的发展_十年思考
- 6深度分析 Apache Hudi:大数据实时处理的利器
- 7Windows电脑部署Jellyfin服务端并进行远程访问配置详细教程_jellyfin无法访问此网站
- 8新手小白上手微信小程序这一篇就够了白话讲解小程序入门常用标签、语法对比vue 第一篇_vue和小程序
- 9【数据结构】(C语言):二叉搜索树
- 10Taro+vue3+nutui3.x构建微信小程序_taro vue3 开发小程序流程
Zemax学习笔记 (8)- 光学系统各种像差 及其 Zemax模拟_慧差是什么意思
赞
踩
1. 概述
像差从字面意思上看,就是成像的误差。光学系统并不是理想的,实际上成像不会完美地在像面上形成一个成像点,任何光学系统都只能尽可能地接近理想状态,那就是形成一个尽可能小的成像点,但这是不可能的,所以实际上的像差就是光线经过 光学系统 到成像面所成像的 变形、模糊等问题的具体描述。
那么根据目前的分类,像差主要包括以下这几种:
 总的来说,按照颜色波长范围分为单色像差和色差。接下来,本文将对每一种像差进行简单的介绍并用Zemax进行相关的模拟。
总的来说,按照颜色波长范围分为单色像差和色差。接下来,本文将对每一种像差进行简单的介绍并用Zemax进行相关的模拟。
2.单色像差
单色像差,就是一种颜色,对应某一个特定的波长或一个极小的波段,如400nm的紫光,所产生的像差。可以在Zemax模拟的时候只设置一种波长即可。
2.1 轴上像差-球差
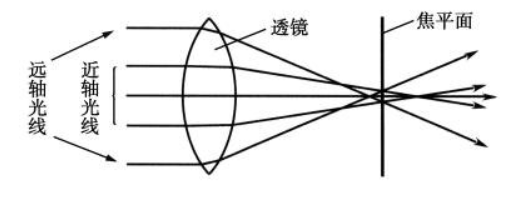
从定性的角度看,球差是由于近轴光线和远轴光线的光程差不想等导致的 焦点不重合。这与离焦问题不同,离焦是焦点完全偏离成像面,即焦平面与成像面没有重合,而球差是有两个或更多的焦平面。球差与镜面直径的四次方成正比,与焦长的三次方成反比,所以他在低焦比的镜子,也就是所谓的“快镜”上就比较明显。当一个望远镜焦比低于f/10时,来自远处的光线就不能聚集在一个点上。特别是来自镜面边缘的光线比来自镜面中心的光线更不易聚焦,这造成影像因为球差的存在而不能很尖锐的成象。所以焦比低于f/10的望远镜通常都使用非球面镜或加上修正镜。球差属于轴上旋转对称像差。
用Zemax模拟球差的话,与上一章[Zemax学习笔记(7)- 双透镜设计实例]中类似。输入以下设计目标,并将第2层厚度设置为边缘厚度为0。这个时候这个单透镜的主要误差就是球差了。因为球差不涉及轴外的像差,因此视场可以先只设置一个点。
设计目标: F/4
焦距:100mm
光谱范围:HeNe(.5438)
材料:BK7
 放大可以更明显的看到焦点的不重合。
放大可以更明显的看到焦点的不重合。

2.2 轴外像差
轴外像差,顾名思义,就是产生的像差是在光轴以外的像差,主要说的是成像面XY平面上的像差。
2.2.1 慧差
慧差,彗形像差,又称彗星像差,因像差的分布形状类似于彗星而得名,是由于轴外物点发出的锥形光束通过光学系统成像后,在理想像面不能形成完善的像点,轴外视场不同孔径区域成像的放大率不同形成的。慧差只存在于轴外视场,它是非旋转对称的像差。在不同光瞳区域的光线对入射在像面的高度各不相同。
彗差被定义为偏离入射光孔的放大变异。在折射或衍射的光学系统,特别是在宽光谱范围的影像中,彗差是波长的函数。彗差是抛物镜望远镜与生俱来的特质,导致不在视野中心的光看起来是楔形的问题,而且离轴越远,这个现象越明显。在设计上能降低球面像差且没有彗形像差的光学系统有施密特(Schmidt)、马克苏托夫(Maksutov)、和里奇-克莱琴式(Ritchey Chrétien)。由于彗差没有对称轴只能垂直度量,所以它是垂轴像差的一种。
彗差的形状有两种:
(1)彗星像斑的尖端指向视场中心的称为正彗差;
(2)彗星像斑的尖端指向视场边缘的称为负彗差;
彗差对成像的影响:
(1)像的清晰度,使成像的质量降低;
(2)彗差对于大孔径系统和望远系统影响较大;
(3)彗差的大小与光束宽度、物体的大小、光阑位置、光组内部结构(折射率、曲率、孔径)有关;
(4)对于某些小视场大孔径的系统(如显微镜),常用“正弦差”来描述小视场的彗差特性;
(5)正弦差等于彗差与像高的比值。
校正:
单一透镜或透镜系统的彗差,可以经由选择适当的透镜被有效的降低(某些情况下可以被消除)。在单一的波长下,球差和彗差都最小的透镜称为 "最佳形式"或齐明透镜 。而目前削减彗差最普遍的方法就是使用非球面镜。彗差的消除方法:使用对称的结构,这种方法不仅只对彗差校正,对象散、场曲、和畸变的校正作用也非常有帮助。
在前边的基础上,通过Zemax模拟,将视场-角度设置为10°,其他可以不变。如下所示即慧差模拟图,可以看到慧差主要是在y方向的偏差不均匀导致的。
 如果我们观察实体模型的话,也会看到,慧差在像面上形成了一个形状类似彗星的图案。按照正负慧差的定义,这是一个正慧差。
如果我们观察实体模型的话,也会看到,慧差在像面上形成了一个形状类似彗星的图案。按照正负慧差的定义,这是一个正慧差。
 从点列图上也可以看出来。
从点列图上也可以看出来。

2.2.2 像散
像散是由于发光物点不在光学系统的光轴上,它所发出的光束与光轴有一倾斜角,该光束经透镜折射后,其子午细光束与弧矢细光束的汇聚点不在一个点上。即光束不能聚焦于一点,成像不清晰,故产生像散。换言之,就是轴外视场光束通过光瞳后,在子午方向与弧矢方向光程不相等,造成两个方向光斑分离所形成的弥散斑。本质是由于垂直平面像(子午面)和水平平面像(弧矢面)的焦点不同导致的在成像面上像点模糊。如下图所示:蓝色的是子午面,红色的是弧矢面。S1是子午面焦点,T1是弧矢面焦点。
 像散类似于我们通常提及的散光,比如人眼的散光,指的是人眼看上下方向与左右方向的景物时清晰度不一样,主要原因是人眼角膜在上下方向与左右方向弯曲度不同,造成的屈光度不同。这其实就像是人眼产生的像散。我们所提及的像差主要在于使用透镜光学系统成像后,像面上光斑的分布情况。像散也正是镜头系统在上下方向与左右方向聚焦能力不同形成的。
像散类似于我们通常提及的散光,比如人眼的散光,指的是人眼看上下方向与左右方向的景物时清晰度不一样,主要原因是人眼角膜在上下方向与左右方向弯曲度不同,造成的屈光度不同。这其实就像是人眼产生的像散。我们所提及的像差主要在于使用透镜光学系统成像后,像面上光斑的分布情况。像散也正是镜头系统在上下方向与左右方向聚焦能力不同形成的。
由于像散的存在,使我们在调整成像光斑时会始终寻找不到最佳焦点,看到的都是一定的弥散斑,光斑或者呈线条形式,或者弥散圆形式,或者椭圆形式。
像散的大小与视场及孔径值大小紧密相关,同时也要注意视场光阑的影响。
打开ZEMAX根目录\Samples\Sequential\Objectives\Cooke 40 degree field.zmx
将波长设置为.5438单波长,视场设置为20°单轴外视场。

从点列图中可以明显看出,轴外视场表现出明显的非旋转对称性,像散表现出子午方向和弧矢方向光斑聚焦的不一致性。这就是像散。退出时不要保存你的修改。
2.2.3 场曲
场曲又称“像场弯曲”。当透镜存在场曲时,整个光束的交点不与理想像点重合,虽然在每个特定点都能得到清晰的像点,但整个像平面则是一个曲面。在一个平坦的影象平面上, 影像的清晰度从中央向外发生变化,聚焦形成弧型,,就叫场曲。原因是中心离镜头近,周边离镜头远。一般拍照团体人像,安排成弧型,就是纠正这一缺点。
注意,在这个概念上需要说明的一点就是,场曲并不是我们观察到的像是弯曲的,而是实际物体成像后最佳焦点集合面是弯曲的。在像面为平面时,我们所看到像是一种清晰度渐变效果,即某一区域很清晰,其它区域却很模糊。如果看到实际像面是弯曲的,便不是场曲造成的,而是畸变。
场曲校正的方法:可以通过优化视场光阑的位置来减小场曲。同样可以使用对称结构来有效地减小场曲,如可以在单透镜前面加一个单透镜,设计为对称式透镜组。
用Zemax设计这样一个简单的单透镜:
EFFL=100
F/#=5
FOV=20
材料BK7
依次输入
EPD = EFFL/F#,可知入瞳直径20mm
半视场角FOV=20 输入三个视场角0,14,20(一般因为20×0.707≈14,经验公式)
插入后表面(第2面)
设置前表面(第1面)厚度10,材料BK7
在后表面(第2面)曲率半径上点右键,选择F Number求解类型:F/#=5
在后表面厚度上点右键,选择边缘光线高度求解,目的为固定后焦面在近轴焦平面上。
ok
 可以看到三个不同视场角的焦点落在一个圆弧上,这便是场曲。
可以看到三个不同视场角的焦点落在一个圆弧上,这便是场曲。
ZEMAX提供了一个专门查看场曲的分析功能:分析 >>像质分析 >>相差分析>>场曲/畸变,在下图的左半部分表示系统场曲情况,可以看到子午方向与弧矢方向场曲大小。
 在像模拟功能上我们可以看到实际物面成像后像面模糊情况:
在像模拟功能上我们可以看到实际物面成像后像面模糊情况:

2.2.4 畸变
畸变指物体通过镜头成像时,实际像面与理想像面间产生的形变。或者说物体成像后,物体的像并非实际物体的等比缩放,由于局部放大率不等而使物体的像产生变形。
畸变分两种:正畸变和负畸变。也就是我们所提及到的枕形畸变与桶形畸变。正畸变:周边的放大率大于中心;负畸变:周边的放大率小于中心。
 由于视场影响畸变大小,所以不同的视场光阑位置得到的畸变贡献都是不一样的。常对称结构贡献的畸变最小,如双高斯或库克三片对称结构。视场光阑在系统前或系统后都会引入较大畸变,如手机镜头的视场光阑一般位于第一面,所以手机镜头在设计时会引入较大畸变。
由于视场影响畸变大小,所以不同的视场光阑位置得到的畸变贡献都是不一样的。常对称结构贡献的畸变最小,如双高斯或库克三片对称结构。视场光阑在系统前或系统后都会引入较大畸变,如手机镜头的视场光阑一般位于第一面,所以手机镜头在设计时会引入较大畸变。
畸变是造成像面与物面间不一致形,甚至局部扭曲变形,特别对于相机镜头,当畸变大于一定的百分比时拍摄出的照片会看到明显变形,让人难以接受。但畸变不同于前面讲的四种像差,像面的变形与成像的分辨率有本质的区别。畸变仅是影响了不同视场在像面上的放大率,即物点成像后的重新分布。但物点在像面上的光斑大小却是由其它像差控制的,如像散、慧差及场曲。
所以在进行畸变分析时,ZEMAX需要提供专门的畸变分析功能来查看畸变量大小,不能用几何光线来描述,也不能通过光斑图或波前图来预测畸变量。只能对所有物点进行光线追迹得到在像面高度,作为最终评价畸变量的大小。
通常的畸变计算公式如下: Distortion = 100*(Ychief-Yref)/Yref
其中Ychief指实际主光线在像面上的高度,Yref指参考光线通过视场比例缩放后在像面上的高度。
通常有三种方法来查看畸变的大小:畸变曲线图,畸变网格图和畸变操作数。
在讲场曲时我们提到场曲曲线图,它是和畸变曲线图在同一图上,畸变曲线图在右边。
我们以ZEMAX自带的超广角系统为例,打开:ZEMAX目录\Samples\Sequential\Objectives\Wide angle lens 100 degree field.zmx,这是一个100度视场的广角镜头,在这样的视场下畸变可想而知。
可以看到产生的桶形畸变非常明显。
①在场曲/畸变图图中 右侧,可看到这个系统的畸变大约有45%左右。
②在网格畸变图中可直观观察畸变形状及大小,也可用来查看TV畸变量。可使用网格畸变窗口上的文本打开数据描述,定量查看具体每个视场点所对应的畸变大小。
 ③使用优化操作数DIMX来查看最大畸变量(评估值):
③使用优化操作数DIMX来查看最大畸变量(评估值):
 以上三种方法查看畸变量,所得到的畸变数值大小是完全相同的,只不过是不同的表现形式而已。
以上三种方法查看畸变量,所得到的畸变数值大小是完全相同的,只不过是不同的表现形式而已。
2.3 色差
多数成像镜头都是应用于可见光波段,波长大约在400~700nm,这就引入了多色光情况下成像后的颜色分离,也就是色散现象。
色差,指颜色像差,是透镜系统成像时的一种严重缺陷,由于同种材料对不同波长的光有不同的折射率,便造成了多波长的光束通过透镜后传播方向分离,也就是色散现象。这样物点通过透镜聚焦于像面时,不同波长的光汇聚于不同的位置,形成一定大小的色斑。简单理解,色差就是颜色分离带来的光学系统的像差。
色差分两种:轴向色差和垂轴色差。
2.3.1 轴向色差
轴向色差也叫球色差或位置色差,指不同波长的光束通过透镜后焦点位于沿轴的不同位置,因为它的形成原因同球差相似,故也称其为球色差。由于多色光聚焦后沿轴形成多个焦点,无论把像面置于何处都无法看到清晰的光斑,看到的像点始终都是一个色斑或彩色晕圈。
轴向色差大概就是这样的。

2.3.2 垂轴色差
垂轴色差也叫倍率色差,指轴外视场不同波长光束通过透镜聚焦后在像面上高度各不相同,也就是每个波长成像后的放大率不同,故称为倍率色差。多个波长的焦点在像面高度方向依次排列,最终看到的像面边缘将产生彩虹边缘带。
 在成像时,基本上以绿色为中心,蓝色系的图像偏大,红色系的图像偏小。发生蓝色色差时,图像的外侧偏蓝,内测偏黄;发生红色色差时,图像外侧偏青色,内测偏红色。当然,也有混合型的色差。
在成像时,基本上以绿色为中心,蓝色系的图像偏大,红色系的图像偏小。发生蓝色色差时,图像的外侧偏蓝,内测偏黄;发生红色色差时,图像外侧偏青色,内测偏红色。当然,也有混合型的色差。
 倍率色差也是一种垂轴色差,同单色像差一样,当光学系统结构完全对称,并以β=-1成像时,该像差也能自动消除。
倍率色差也是一种垂轴色差,同单色像差一样,当光学系统结构完全对称,并以β=-1成像时,该像差也能自动消除。
2.3.3 Zemax分析色差
可以使用分析单色像差的方法在光线差图中(Ray Fan)得到色差的分布大小,或者使用ZEMAX专门提供的色差曲线来分析。
我们任意单透镜为例来说明色差,只要系统是多波长即可。通常可见光波段我们用F,d,C三个波长来代替。
打开 分析>>像质分析>>像差分析>>轴向像差和垂轴色差
 对于色差的校正,我们通常使用双胶合消色差透镜,或三胶合复消色差透镜。通过优化,色差会大幅度减小。
对于色差的校正,我们通常使用双胶合消色差透镜,或三胶合复消色差透镜。通过优化,色差会大幅度减小。
3.总结
本节主要介绍了光学系统的各种像差,包括球差、慧差、场曲、像散、畸变以及色差,并介绍了如何用Zemax模拟和分析相关的像差。

