
热门标签
热门文章
- 1【系统集成项目管理工程师】计算题专题二_系统集成项目管理工程师-计算题 - 考拉很ok
- 2python导入自定义包时报错ModuleNotFoundError: No module named ‘v3‘_no module named 'dcnv3
- 3Windows和Kali上使用proxychains代理流量_proxychains windows
- 4应用部署优化方案分享
- 5远程软件ToDesk、splashtop、向日葵横向评测,谁是性价比之王?_todesk类似
- 6SVN UI工具推荐-TortoiseSVN_svn gui 工具
- 7爬虫案例之网易有道翻译Python代码改写
- 8AHT20温湿度传感器的数据采集&&_单片机aht20采集温湿度
- 9在PyCharm中使用git上传项目(看了不会来找我)_pycharm在自己的git上传代码
- 10A星(A*,A star)寻路算法c++_传奇调用a星算法
当前位置: article > 正文
基于stm32的巡线避障智能小车设计_蓝牙智能巡线小车
作者:运维做开发 | 2024-07-17 04:32:03
赞
踩
蓝牙智能巡线小车
一、任务简述
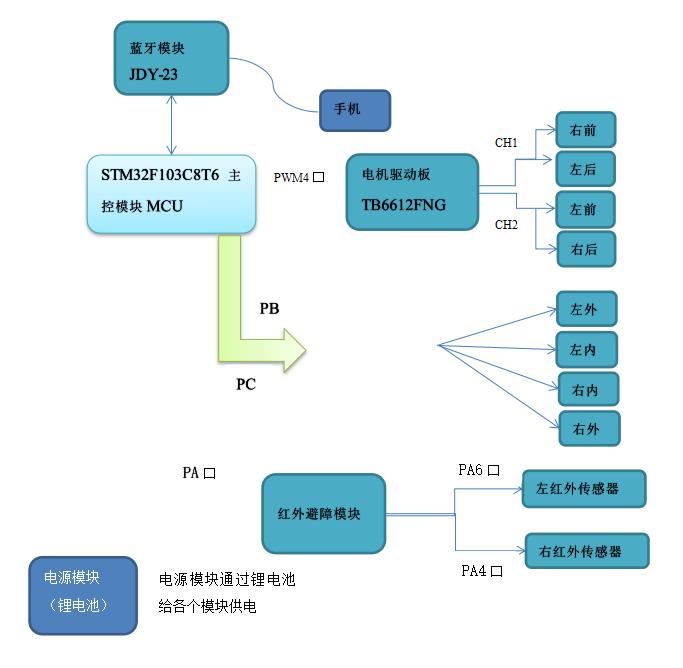
主要介绍了一种采用四轮驱动的智能小车的设计方法,并对其进行了实验研究,各模块将采集到的相关数据传送至STM32控制器,之后利用红外传感器和超声波传感器进行实时检测路面状况,对数据进行分析、处理,可实现路径规划、实时避障等功能。本设计的创新点在于:通过运用红外传感器,实现指定路线的巡线避障。
关键词:STM32;STM32F103C8T6核心板;红外传感器;巡航避障
二、说明书目录
三、总体设计
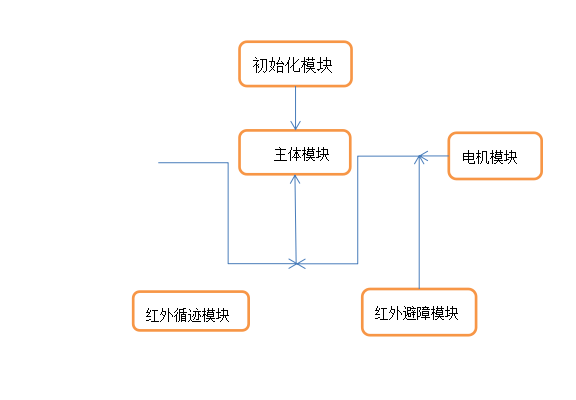
四、软件设计
- void app_IRAvoid(void)
- {
- int IRL1 = 1, IRR1 = 1;
- bsp_GetIRavoid(&IRL1, &IRR1);//右侧检测到
- if( IRL1 == HIGH && IRR1 == LOW)
- {
- Car_SpinLeft(3000, 3000);
- }//左侧检测到
- else if ( IRL1 == LOW && IRR1 == HIGH)
- {
- Car_SpinRight(3000, 3000);
- }
- //左右均未检测到
- else if (IRL1 == HIGH && IRR1 == HIGH)
- {
- Car_Run(3000);
- }
- //左右均检测到
- else if(IRL1 == LOW && IRR1 == LOW)
- {
- Car_SpinRight(3000, 3000);
- delay_ms(500);
- }
- }
-
- 附录2
- 智能小车巡线功能代码:
- void app_LineWalking(void)
- {
- int LineL1 = 1, LineL2 = 1, LineR1 = 1, LineR2 = 1;
- bsp_GetLineWalking(&LineL1, &LineL2, &LineR1, &LineR2); //获取黑线检测状态
- if( (LineL1 == LOW || LineL2 == LOW) && LineR2 == LOW) //左大弯
- {
- Car_SpinLeft(3500, 3500);
- delay_ms(80);
- }
- else if ( LineL1 == LOW && (LineR1 == LOW || LineR2 == LOW)) //右大弯
- {
- Car_SpinRight(3500, 3500);
- delay_ms(80);
- }
- else if( LineL1 == LOW ) //左最外侧检测
- {
- Car_SpinLeft(3000, 3000);
- delay_ms(10);
- }
- else if ( LineR2 == LOW) //右最外侧检测
- {
- Car_SpinRight(3000,3000);
- delay_ms(10);
- }
- else if (LineL2 == LOW && LineR1 == HIGH) //中间黑线上的传感器微调车左转
- {
- Car_Left(2500);
- }
- else if (LineL2 == HIGH && LineR1 == LOW) //中间黑线上的传感器微调车右转
- {
- Car_Right(2500);
- }
- else if(LineL2 == LOW && LineR1 == LOW) // 都是黑色加速前进
- {
- Car_Run(3000);
- }
- }
-
-
- 附录3
- 蓝牙串口的代码如下:
- void app_bluetooth_deal(void)
- {
- if (newLineReceived)
- {
- Protocol();
- } // 切换不同的功能模式,功能模式显示
- switch (g_modeSelect)
- {
- case 1: break; //暂时保留
- case 2: app_LineWalking(); break; //巡线模式
- case 3: app_iravoid.(); break; //红外避障模式
- default:break;
- }
-
- //让小车串口平均每秒发送收集的数据给收集手机蓝牙apk
- //避免串口打印数据速度过快,造成apk无法正常运行
- if (g_modeSelect == 0 && g_Boolfire == 0)
- {
- if (g_count >= 100000)
- {
- g_count = 0;
- serial_data_postback();
- }
- }
-
- }

有需要私聊,微信:lwfw123456789
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/运维做开发/article/detail/837986
推荐阅读

相关标签

