- 13D-DIC数字图像相关法测量流程介绍-数字图像采集_视觉软件中触发周期是什么意思
- 2【windows】亲测-win11系统跳过联网和微软账户登录,实现本地账户登录_win11跳过联网激活
- 3【数据结构和算法初阶(C语言)】时间复杂度(衡量算法快慢的高端玩家,搭配例题详细剖析)_衡量一个算法好坏一般以最坏的时间复杂度为标准
- 4如何在群晖NAS搭建bitwarden密码管理软件并实现无公网IP远程访问_群晖怎么安装bitwarden
- 5基于Hadoop的区块链海量数据存储的设计与实现_区块链 hdfs
- 6iOS(一):Swift纯代码模式iOS开发入门教程_swift 开发ios入门教程
- 7学懂C语言系列(三):C语言基本语法
- 8kafka架构深入
- 9Langchain-chatchat: Langchain核心组件及应用_langchain chatchat
- 10【爬虫】1.4 POST 方法向网站发送数据_网页爬虫 post数据
A星寻路算法详解(C++实现 完整代码+图片演示 )_a星算法
赞
踩
三种寻路算法
- 深度寻路算法:不一定能找到最佳路径,但是寻路快速,只能走直线。
- 广度寻路算法:一定能找到最短路径,但是开销大,时间慢,只能走直线。
- A星寻路算法(常用):一定能找到最短路径,可以走直线和斜线,而且开销较小,常用于大型地图的寻路
A星寻路算法
A星寻路算法思想
引入: 狼吃羊模型。
狼捕猎羊:如果抓到了就加100分;如果狼不动,每分钟减2分;如果狼抓捕时会跑,跑步每分钟减5分;
狼会饿 ,饿的时候每分钟减10分。 有一个积分的概念在这里面。结果会发现狼会站在原地不动。
因为狼直到,抓住羊很困难,跑步时会扣分,饿时会扣分,不动时也会扣分。但是人工智能狼计算出了站着不动时扣分的代价最低,而干其他事代价都高,因此狼会自动选择代价最低的方式,一动不动
之后又加了设定:原地不动每分钟也扣分,而且是线性扣分。结果你会发现狼从一开始就会自杀。
同理,自杀是代价最小的选择(即分数最高,如果你干其他的事,则可能会负分,所以狼会选择自杀)。
A星寻路算法也引入了这一概念,即通过计算和量化行走的各个方向的代价,来选择最优路径
- 公式: f = g + h
- f: 设定其为最终评估代价
- g:当前点走到下一点的付出的代价
- h:当前点到终点的预期代价
- 通过比较各条路线的最终代价,选择最小代价,即为合适的路径,也为最短路径。
A星寻路准备
地图行列数,方向枚举,地图,辅助地图的设计等在此不描述,具体请看之前我写的前两种寻路算法的博客。
广度寻路算法
深度寻路算法
- 记录坐标点的类型,GetH和GetF函数即为计算各种代价的函数,稍后会介绍。一个重载用来比较当前点是否到达终点
h表示当前点到终点的预期代价,因此我们每次移动一步,都需要求出 h,而h的计算我们可以直接通过数格子来获得,即水平,竖直个有几个格子,这便是预期的代价
g表示走到每一点的代价,因此每走一个方向,记录这个方向的代价, 最后选择代价最小的方向即可,g可以通过遍历八个方向来记录
f =g + h
//点类型 struct Mypoint { int row; int col; int f, g, h; bool operator==(const Mypoint& pos) { return (pos.row == row && pos.col == col); } void GetH(const Mypoint& Begpos, const Mypoint& Endpos) { int x = abs(Begpos.col - Endpos.col);//计算水平差距 int y = abs(Begpos.row - Endpos.row);//计算垂直差距 h = x + y;//计算总的差距 } inline void GetF() { f = g + h;//计算f } };

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 存储位置节点的树结构,含有构造函数用来构建树节点,vector数组存储多个节点:因为一个父亲会有多个孩子的情况。
//树结构存储节点
struct TreeNode
{
Mypoint pos;//当前点坐标
TreeNode* pParent;//当前点的父节点
vector<TreeNode*> pChild; //存储当前点的所有孩子节点
//构造函数
TreeNode(const Mypoint& pos)
{
this->pos = pos;
pParent = nullptr;
}
};
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 判断是否能走的函数,用于判断地图某个点是否能走,即不为墙,没越界,没走过,则能走。
//判断某个点能否走 bool CanWalk(int map[ROW][COL], bool vis[ROW][COL], const Mypoint& pos) { //如果越界,不能走 if (pos.row < 0 || pos.col < 0 || pos.row >= ROW || pos.col >= COL) { return false; } //如果是墙,不能走 if (map[pos.row][pos.col]) { return false; } //如果已经走过,不能走 if (vis[pos.row][pos.col]) { return false; } return true;//否则能走 }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 数据的准备
- 起点与终点的坐标
- 树根节点,用于保存寻路的树结构
- buff数组来记录每一个孩子节点,用来确定下一步该走的点
- vis标记数组,不能重复走
- 当前点与试探点
void init() { //地图,1表示墙,0表示路径 int map[ROW][COL] = { {0,0,0,0,1,0,0,0,0,0}, {0,0,0,0,1,0,0,0,0,0}, {0,0,0,1,1,0,1,0,0,0}, {0,0,0,0,1,0,1,0,0,0}, {0,0,0,0,1,0,1,0,0,0}, {0,0,1,0,1,0,0,0,0,0}, {0,0,0,0,1,0,0,0,0,0}, {0,0,0,0,0,0,1,0,0,0}, {0,0,0,0,1,1,0,0,0,0}, {0,0,0,0,1,0,0,0,0,0}, }; //起始点和终点 Mypoint Begpos = { 1,1 }; Mypoint Endpos = { 6,5 }; //标记有没有走过 bool vis[ROW][COL] = { false }; //创建树根,即根节点 TreeNode* pRoot = new TreeNode(Begpos); vector<TreeNode*> buff; //存储孩子节点的数组 TreeNode* pCurrent = pRoot; //记录当前点 TreeNode* pTemp = nullptr; //试探节点,用于试探下一个位置的点 bool isFindEnd = false;//终点标记 }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
A星寻路过程(图例)
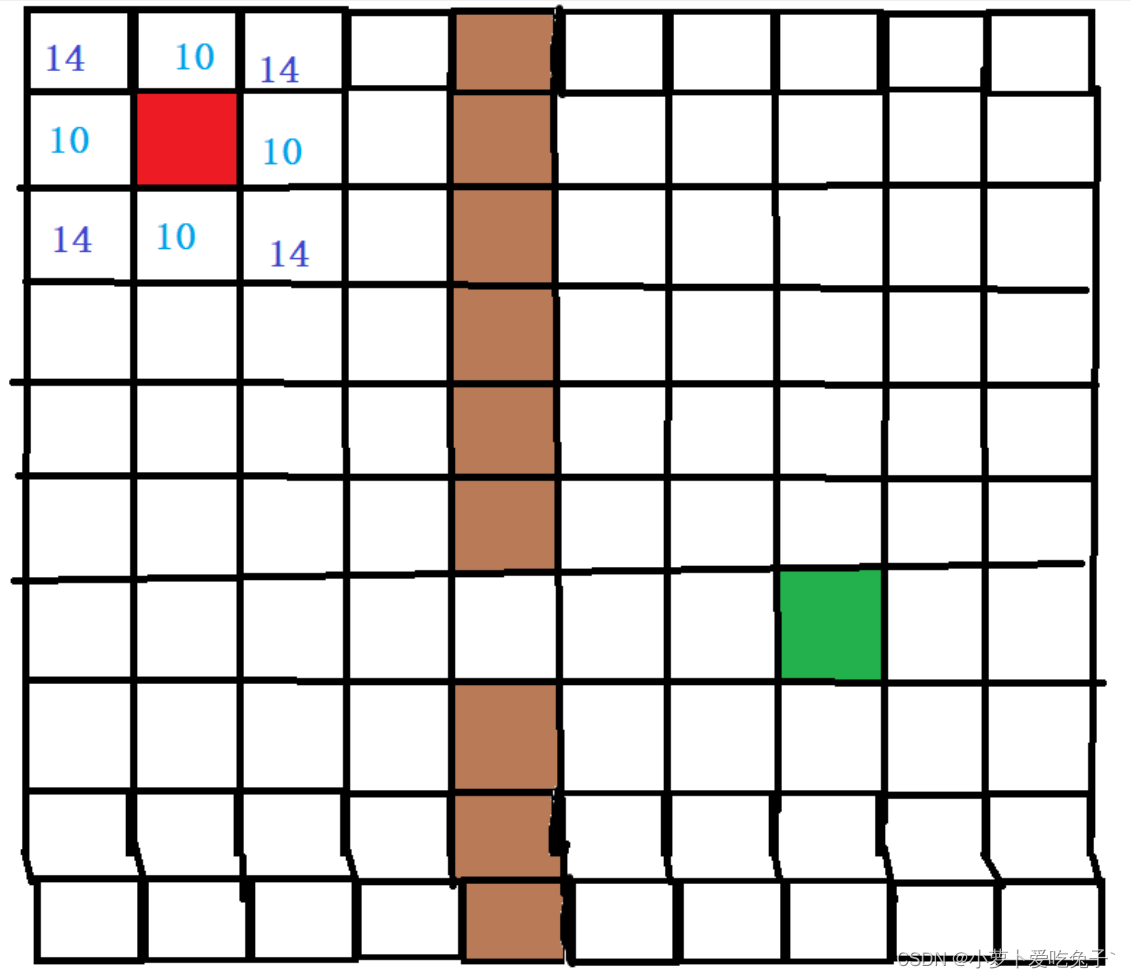
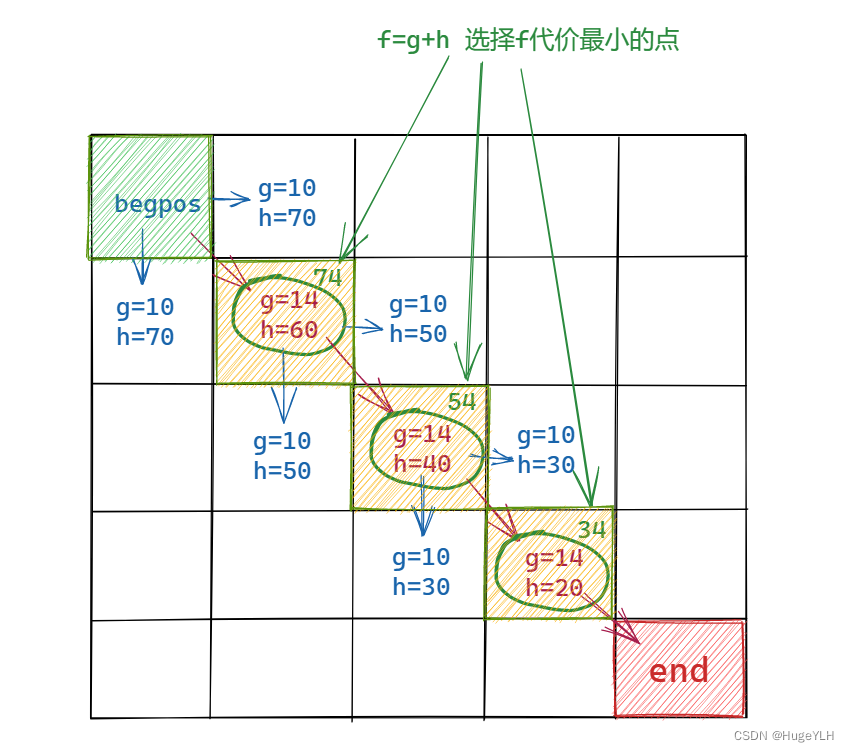
假定直着走的代价为10,斜着走的代价为14
-
首先计算起点位置周围八个方向付出代价(蓝色),此代价为付出的代价 g。
-
然后再计算起点到终点的代价(如何计算:数格子即可,某个点到终点的格子数,只能行列,不能斜着),此代价为预期代价h,可以发现 最终代价=付出+预期,可以得到一个最小的代价点,即右下角的斜着的点。
这个点即是我们下一步要走的点。依次类推,在下个点上,再次计算周围代价最小的点,然后再次移动
upd: 2023. 2.22 新增一个图
-
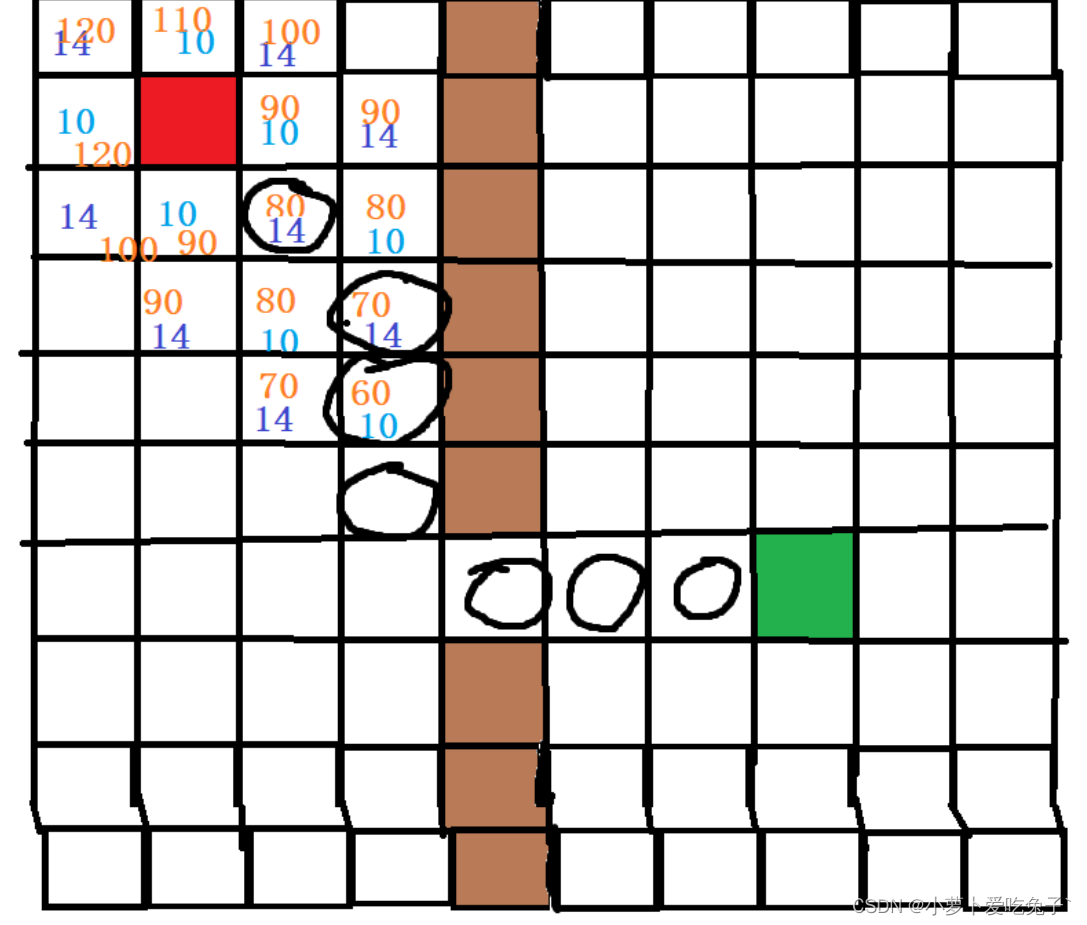
注意:标记起始点和每个移动到的点为已经走过点,即下一次不会重复移动到这个点。
-
在移动到的点处(代价最小点),继续遍历八个方向,除了墙壁和已经走过点,继续计算最终代价,找到最终代价小的点,移动。
-
注意:如果你移动到了一个死胡同,则必须回退,如何回退?
我们事先准备了一个容器vector名字叫做 buff ,来存储我们每次遍历的方向的节点,即我们把每一个方向都创建一个节点,然后节点入树,节点再入容器,当我们走到死胡同时,通过找到容器内的最小元素(即是代价最小点,但是这个点是死胡同),然后把他删除,则 再次找一个代价最小点,然后移动到它那里去 。
如果地图没有终点,则可以想到,容器会一直删除,然后为空,此时则退出,没有终点。
A星寻路代码(完整)
#include <iostream> #include <vector> #include <algorithm> using namespace std; const int ROW = 10; const int COL = 10; const int ZXDJ = 10; //直线代价 const int XXDJ = 14; //斜线代价 enum Dir { p_up, p_down, p_left, p_right, p_lup, p_ldown, p_rup, p_rdown }; struct Mypoint { int row; int col; int f, g, h; bool operator==(const Mypoint& pos) { return (pos.row == row && pos.col == col); } void GetH(const Mypoint& Begpos, const Mypoint& Endpos) { int x = abs(Begpos.col - Endpos.col);//计算水平差距 int y = abs(Begpos.row - Endpos.row);//计算垂直差距 h = x + y;//计算总的差距 } inline void GetF() { f = g + h;//计算f } }; //树结构存储节点 struct TreeNode { Mypoint pos;//当前点坐标 TreeNode* pParent;//当前点的父节点 vector<TreeNode*> pChild; //存储当前点的所有孩子节点 //构造函数 TreeNode(const Mypoint& pos) { this->pos = pos; pParent = nullptr; } }; //判断某个点能否走 bool CanWalk(int map[ROW][COL], bool vis[ROW][COL], const Mypoint& pos) { //如果越界,不能走 if (pos.row < 0 || pos.col < 0 || pos.row >= ROW || pos.col >= COL) { return false; } //如果是墙,不能走 if (map[pos.row][pos.col]) { return false; } //如果已经走过,不能走 if (vis[pos.row][pos.col]) { return false; } return true;//否则能走 } int main() { //地图,1表示墙,0表示路径 int map[ROW][COL] = { {0,0,0,0,1,0,0,0,0,0}, {0,0,0,0,1,0,0,0,0,0}, {0,0,0,1,1,0,1,0,0,0}, {0,0,0,0,1,0,1,0,0,0}, {0,0,0,0,1,0,1,0,0,0}, {0,0,1,0,1,0,0,0,0,0}, {0,0,0,0,1,0,0,0,0,0}, {0,0,0,0,0,0,1,0,0,0}, {0,0,0,0,1,1,0,0,0,0}, {0,0,0,0,1,0,0,0,0,0}, }; //起始点和终点 Mypoint Begpos = { 1,1 }; Mypoint Endpos = { 6,5 }; //标记有没有走过 bool vis[ROW][COL] = { false }; //创建树根,即根节点 TreeNode* pRoot = new TreeNode(Begpos); vector<TreeNode*> buff; //存储孩子节点的数组 TreeNode* pCurrent = pRoot; //记录当前点 TreeNode* pTemp = nullptr; //试探节点,用于试探下一个位置的点 bool isFindEnd = false;//终点标记 //开始寻路 while (1) { //1. 某个点八个方向依次遍历 计算g代价 for (int i = 0; i < 8; ++i) { //确定试探点的属性 pTemp = new TreeNode(pCurrent->pos); //八个方向进行试探! switch (i) { //直线代价 case p_up://上 pTemp->pos.row--; pTemp->pos.g += ZXDJ; break; case p_down://下 pTemp->pos.row++; pTemp->pos.g += ZXDJ; break; case p_left://左 pTemp->pos.col--; pTemp->pos.g += ZXDJ; break; case p_right://右 pTemp->pos.col++; pTemp->pos.g += ZXDJ; break; //斜线代价 case p_lup://左上 pTemp->pos.row--; pTemp->pos.col--; pTemp->pos.g += XXDJ; break; case p_ldown://左下 pTemp->pos.row++; pTemp->pos.col--; pTemp->pos.g += XXDJ; break; case p_rup://右上 pTemp->pos.row--; pTemp->pos.col++; pTemp->pos.g += XXDJ; break; case p_rdown://右下 pTemp->pos.row++; pTemp->pos.col++; pTemp->pos.g += XXDJ; break; } //判断他们能不能走,能走的计算h及f 入树 存储在buff数组 if (CanWalk(map, vis, pTemp->pos)) { //能走 //计算代价 pTemp->pos.GetH(pTemp->pos, Endpos);//计算h代价 pTemp->pos.GetF();//得到最后的f代价,f=g+h //把能走的这个点存入树中 pCurrent->pChild.push_back(pTemp);//pTemp表示的就是下一个能走的点 pTemp->pParent = pCurrent;//父子关系确定 //存入数组 buff.push_back(pTemp); //标记这个点走过 vis[pTemp->pos.row][pTemp->pos.col] = true; } else { //不能走则删除pTemp,继续遍历下一个方向的点 delete pTemp; pTemp = nullptr; } } /* 遍历完八个方向后,找到最小代价点,并且移动,然后删除 */ auto itMin = min_element(buff.begin(), buff.end(), [&](TreeNode* p1, TreeNode* p2) { return p1->pos.f < p2->pos.f; }); //当前点移动到这个最小代价点 pCurrent = *itMin; //删除最小代价节点 buff.erase(itMin); //有没有到达终点 if (pCurrent->pos == Endpos) { isFindEnd = true; break; } //没有终点,自然一直删除节点,则buff为空 if (buff.size() == 0) { break; } } if (isFindEnd) { cout << "找到终点了!\n"; while (pCurrent) { cout << "(" << pCurrent->pos.row << "," << pCurrent->pos.col << ")"; pCurrent = pCurrent->pParent; } } else { cout << "没有找到终点!\n"; } return 0; }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
- 190
- 191
- 192
- 193
- 194
- 195
- 196
- 197
- 198
- 199
- 200
- 201
- 202
- 203
- 204
- 205
- 206
- 207
- 208
- 209
- 210
- 211
- 212
- 213
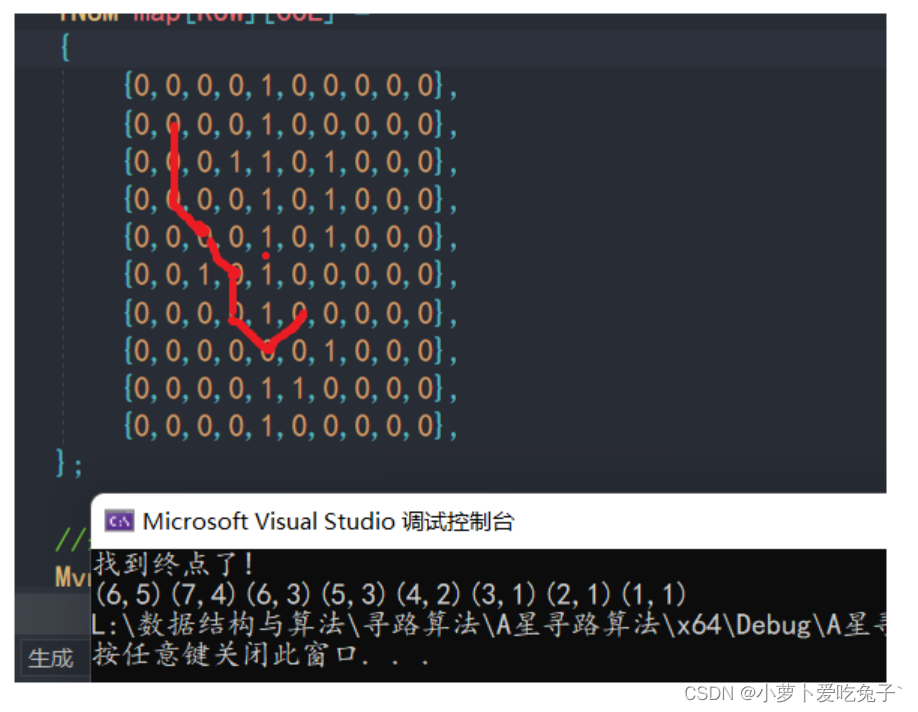
终点row,col(7,7):
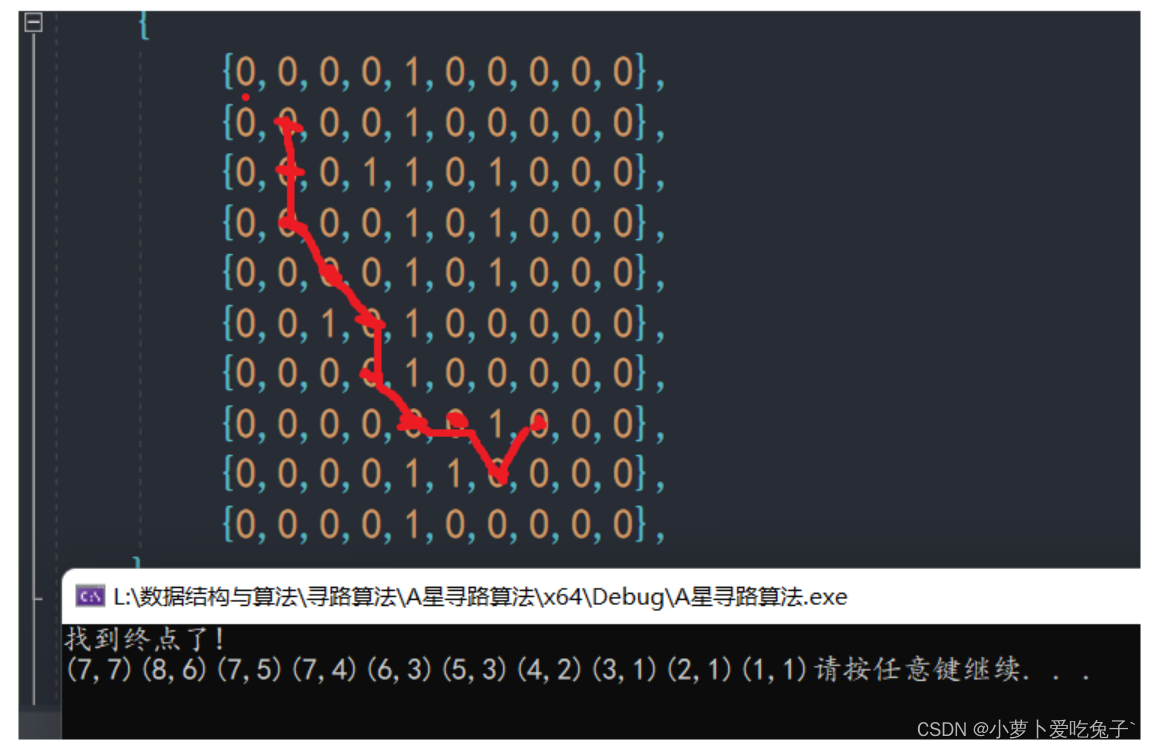
终点row,col(6,5)