
热门标签
热门文章
- 1linux开机自动执行脚本、运行程序_linux自动执行脚本
- 2如何通过.NET8为AutoCAD2025开发DLL插件
- 3魔方还原算法(一) 概述
- 4NLP学习笔记二 - onehot编码和一般的数值编码_nlp onehot csdn
- 5Linux 系统中用户、用户组和文件权限管理的常用命令 useradd、usermod、groupadd、groupmod、chmod_linux怎么创建用户和用户组
- 6Spring Boot 配置文件_springboot项目的配置文件
- 7ARMv8-M中的TrustZone技术架构_armv8-m trustzone whitepaper
- 8MySQL数据库事务的四种隔离级别_mysql中的事务隔离级别
- 9C++程序员真的快要被市场淘汰了吗?_c++是否过时
- 10Python实现Excel拆分操作_python 拆分excel
当前位置: article > 正文
5、双足机器人mpc动力学模型_双足 动力学模型
作者:运维做开发 | 2024-08-04 01:00:26
赞
踩
双足 动力学模型
为计算机器人的当前实际状态x,需要建立双足质心动力学模型。
-
-
- 速度模型
-
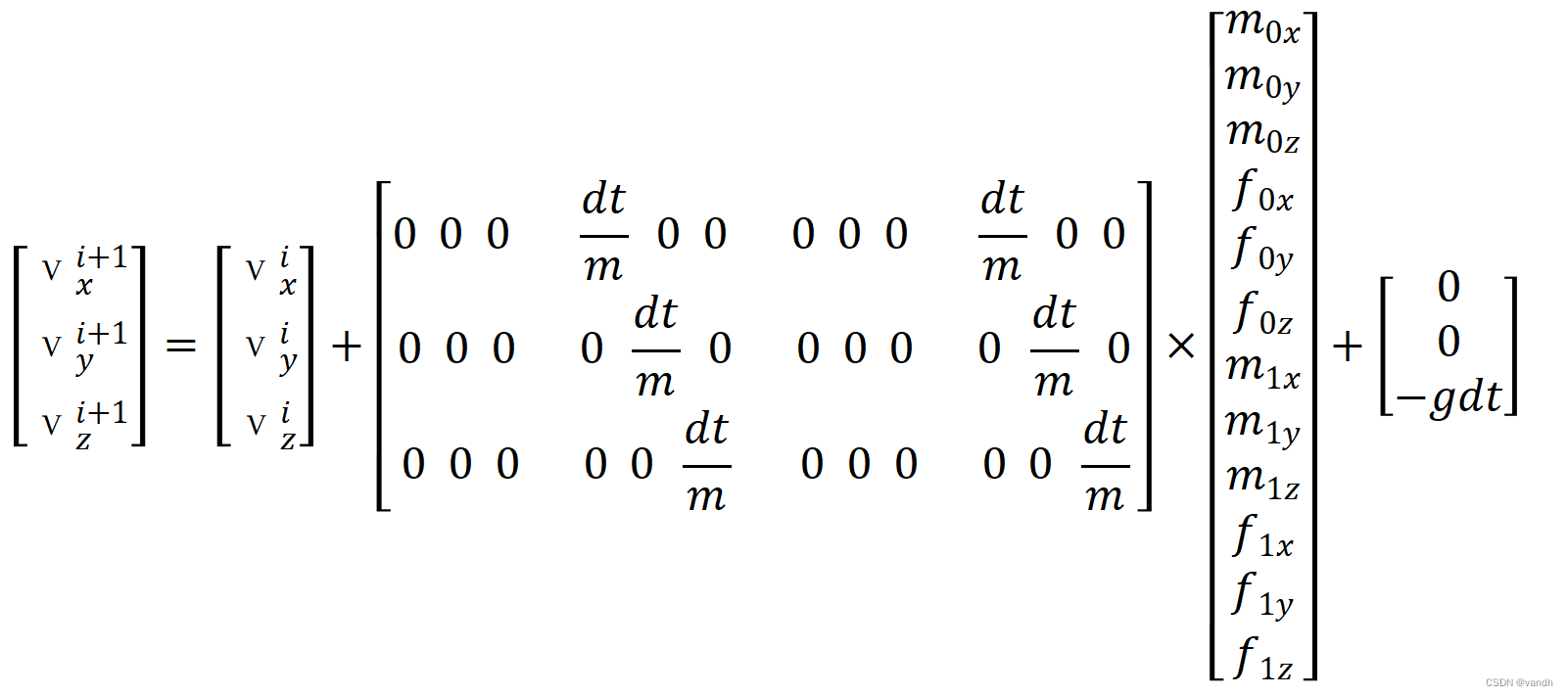
由控制输入变量推导速度公式:
- x向速度νx :当前机器人x方向的前进速度,初始值由速度传感器实时测量得到。
- y向速度νy :机器人y方向的平移速度。
- z向速度νz :垂直方向的速度,对于双足机器人行走时为0:

- 速度递推序列:νi+1 = νi +Δν,写成矩阵形式
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/运维做开发/article/detail/925592
推荐阅读
相关标签

