
- 1org.apache.zookeeper.KeeperException$UnimplementedException: KeeperErrorCode = Unimplemented for /LO
- 2从gitHub上拉去项目后一直卡在下载中...问题解决_github 下载转圈
- 3哈希表及其基础(java详解)_java哈希表
- 4「Nginx」- 获取客户端的真实地址(Real IP Address) @20210217_nginx real ip address
- 5电影评分数据集的分析
- 6文本信息常用的事件抽取模型
- 7【AIGC X UML 落地】从UML语句到UML图形的生成,来看Agent插件的制作
- 8chatgpt赋能python:Python中“+”的用法介绍_python怎么吧字符串加编程运算加
- 9Keras NLP——词嵌入模型_外部词嵌入模型
- 10【头歌-Python】流程控制自学引导_输入起点、终点和步长,编写一个小程序在同一行内输出等差数列,输出的每个数字后加
香橙派KunpengPro测评之使用C语言操控40pin引脚_香橙派 40pin
赞
踩
香橙派KunpengPro测评之使用C语言操控40pin引脚
香橙派KunpengPro介绍
香橙派鲲鹏Pro是一款高性能开发板,搭载4核64位鲲鹏处理器与AI加速器,提供8/16GB LPDDR4X内存及多种存储扩展选项。它配备双HDMI输出、M.2插槽、USB 3.0/Type-C接口等,支持4K视频、高速数据传输及网络连接。预装openEuler操作系统,适合AI研发、云计算、大数据处理等应用场景,凭借其强大的性能与灵活扩展性,成为教育、开发及创新项目的优选平台。

香橙派实物图
香橙派KunpengPro正面图

香橙派KunpengPro反面图

香橙派KunpengPro左侧面图

香橙派KunpengPro右侧面图

香橙派登录界面
香橙派KunpengPro的登录界面

香橙派KunpengPro的原始桌面
香橙派KunpengPro内安装了VScode等软件

香橙派KunpengPro的终端

香橙派硬件参数
OrangePi Kunpeng Pro是一款高性能、高扩展性的单板计算机,专为需要强大AI算力、高速数据处理及多场景应用开发的用户设计,提供了从硬件到软件的全面解决方案。
核心性能
- 处理器架构:搭载4核64位处理器,集成了专门的AI处理单元,针对人工智能任务优化。
- AI算力:支持高达8TOPS(Tera Operations Per Second)的AI运算能力,适合机器学习与深度学习应用。
- 存储扩展:可通过外接eMMC模块扩展存储,支持32GB至256GB不同容量,满足不同存储需求。
- 内存配置:配备高端的8GB/16GB LPDDR4X内存,确保流畅的数据处理和运行效率。
图形与显示
- 图形处理:集成高效图形处理器,强化视觉处理与高清输出能力。
- 视频输出:支持双路4K高清视频输出,适用于多屏展示或高分辨率监控系统。
接口丰富性
- 外部连接:提供全面的接口选项,包括双HDMI、GPIO、Type-C电源输入、M.2插槽(兼容SATA/NVMe SSD)、TF卡插槽、千兆以太网口、多个USB端口(含USB3.0及USB Type-C 3.0)、Micro USB(具备串口打印调试功能)。
- 多媒体支持:配备MIPI接口,支持连接摄像头与显示屏,拓展物联网与视觉项目应用。
扩展与兼容性
- M.2插槽:特别提及的M.2 2280插槽,支持快速SSD,提升系统响应速度与数据传输效率。
- 电池接口预留:便于移动设备改造或低功耗应用的开发需求。
软件与应用生态
- 操作系统:兼容openEuler操作系统,为开发者提供稳定且开源的操作环境。
- 应用场景:广泛适用于AI算法验证、推理应用开发,以及云计算、大数据处理、分布式存储和高性能计算等领域,展现了其作为高性能计算平台的潜力。
香橙派KunpengPro搭建环境
准备的工具有内存32G以上的高速闪迪TF卡、一个读卡器、香橙派KunpengPro镜像、香橙派KunpengPro镜像烧录工具、HDMI显示屏和HDMI转HDMI线或者使用一根Micro数据线进行串口登录。
下载镜像和烧录镜像工具
打开香橙派官网http://www.orangepi.cn/,选择开源硬件中的开发板,选择OrangePi Kunpeng Pro。

点击下载

需要下载下面这三个内容

官方工具下载
官方工具下载下面这几个就够用了。

烧录镜像
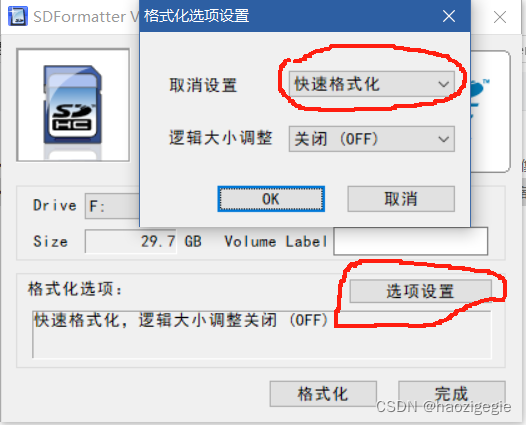
快速格式化TF卡
将TF卡插入读卡器,插到电脑的USB口中,并打开格式化工具SDCardFormatter进行快速格式化。
烧录香橙派KunpengPro的镜像
选择目标镜像和目标TF卡。

开始烧录。

烧录完成后,把TF卡插到香橙派KunpengPro开发板上,并接上Micro数据线,先不接通电源。
香橙派KunpengPro登录
串口登录
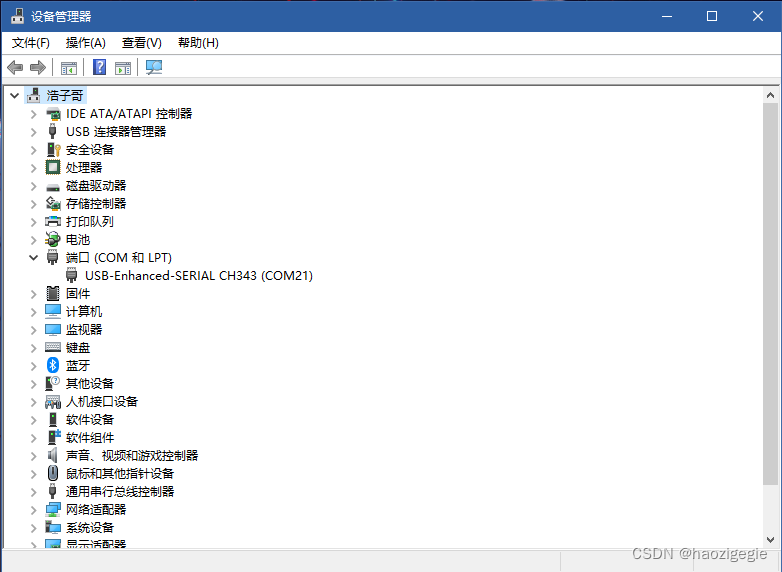
接上Micro数据线,在设备管理器查看COM口。
使用MobaXterm软件建立串口连接。
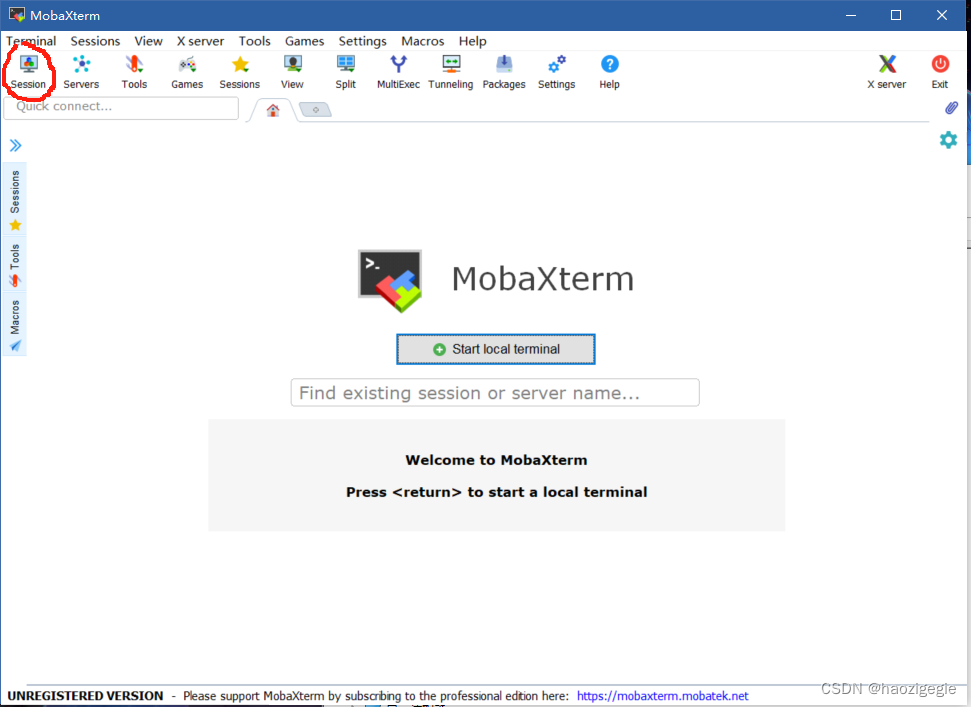
串口号选择设备管理器对应的,波特率选择115200。

流控制选择NONE。

插上电源,查看登录日志。
输入账号:openEuler,密码:openEuler进行登录。

连接WiFi进行SSH登录
sudo nmcli dev wifi,扫描香橙派KunpengPro附近的WiFi。
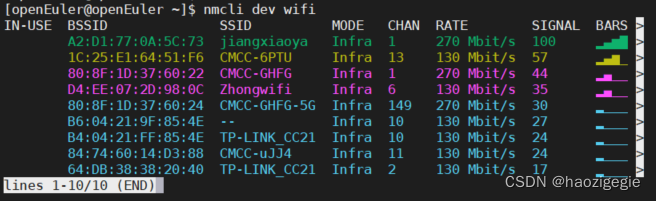
sudo nmcli dev wifi connect 用户名 password 密码,连接WiFi。

ifconfig,查看IP地址。

建立SSH连接

输入密码,选择No,就可以SSH登录香橙派KunpengPro了。

香橙派KunpengPro使用C语言驱动40pin引脚
众所周知,香橙派、树莓派等Linux开发板操控引脚使用最多的方法便是利用wiringPi库,本次测评的香橙派KunpengPro本来也是打算使用wiringOP库进行操控引脚,但是香橙派KunpengPro这块开发板还未适配wiringOP库,所以只能使用其他的方法来操控GPIO口。
方法1:使用system函数调用官方用户手册给出的命令
这个方法不太推荐,有兴趣的小伙伴可以了解一下,必须要以root账户去执行这些操控GPIO口的命令。
gpio_operate -h 命令
gpio_operate -h 命令可以获取 gpio_operate 工具的帮助信息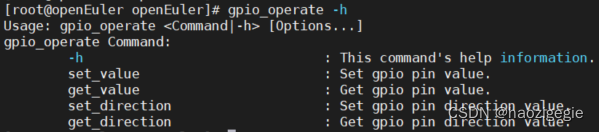
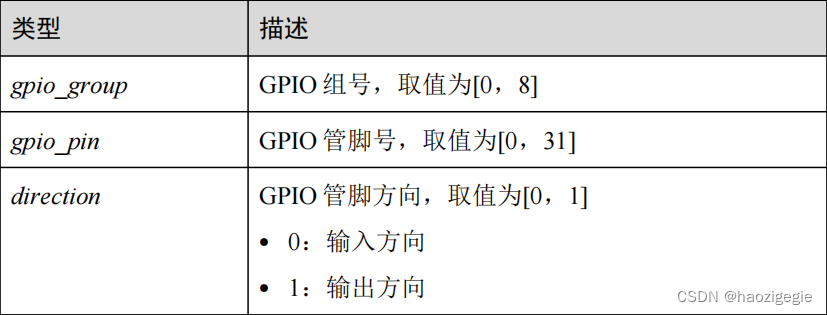
gpio_operate get_direction gpio_group gpio_pin 命令
gpio_operate get_direction gpio_group gpio_pin 命令用于查询 GPIO 管脚方向。

value的值是0,该引脚就是输入引脚,value的值是1,该引脚就是输出引脚,


gpio_operate set_direction gpio_group gpio_pin direction命令
gpio_operate set_direction gpio_group gpio_pin direction 用于设置 GPIO 管脚方向。

gpio_operate get_value gpio_group gpio_pin 命令
gpio_operate get_value gpio_group gpio_pin 命令用于查询 GPIO 管脚值。

查询到value的值是0,那么引脚电平就是低电平,查询到value的值是1,那么引脚电平就是高电平。

gpio_operate set_value gpio_group gpio_pin value 命令
gpio_operate set_value gpio_group gpio_pin value 命令用于设置 GPIO 管脚值为高电平或者低电平。


方法2:使用我提供的gpioControl.c和gpioControl.h文件
使用这两个文件,只需要调用相应的函数,就可以控制IO口的输入、输出方向,输出高低电平等等功能,而且减少了系统调用,增加了代码的健壮性,话不多说,直接上代码
gpio控制源文件
gpioControl.c
void write_to_file(const char *filename, const char *value) { int fd = open(filename, O_WRONLY); if (fd < 0) { perror("open"); exit(EXIT_FAILURE); } if (write(fd, value, strlen(value)) < 0) { perror("write"); exit(EXIT_FAILURE); } close(fd); } void gpio_export(int pin) { char buffer[4]; snprintf(buffer, sizeof(buffer), "%d", pin); write_to_file(GPIO_EXPORT, buffer); usleep(100000); // 等待GPIO初始化完成 } void gpio_unexport(int pin) { char buffer[4]; snprintf(buffer, sizeof(buffer), "%d", pin); write_to_file(GPIO_UNEXPORT, buffer); } void gpio_set_direction_in(int pin) { char path[50]; snprintf(path, sizeof(path), GPIO_PATH_FORMAT, pin, "direction"); write_to_file(path, "in"); } void gpio_set_direction_outMode(int pin) { char path[50]; snprintf(path, sizeof(path), GPIO_PATH_FORMAT, pin, "direction"); write_to_file(path, "out"); } void gpio_set_direction_out(int pin, GPIO_Value value) { char path[50]; snprintf(path, sizeof(path), GPIO_PATH_FORMAT, pin, "direction"); write_to_file(path, "out"); snprintf(path, sizeof(path), GPIO_PATH_FORMAT, pin, "value"); write_to_file(path, value == HIGH ? "1" : "0"); } int gpio_get_value(int pin) { char path[50]; char value_str[3]; snprintf(path, sizeof(path), GPIO_PATH_FORMAT, pin, "value"); int fd = open(path, O_RDONLY); if (fd < 0) { perror("open"); exit(EXIT_FAILURE); } if (read(fd, value_str, sizeof(value_str)) < 0) { perror("read"); exit(EXIT_FAILURE); } close(fd); return atoi(value_str); }

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
gpioControl.h
#ifndef GPIO_CONTROL_H #define GPIO_CONTROL_H #include <stdio.h> #include <stdlib.h> #include <unistd.h> #include <fcntl.h> #include <string.h> #define GPIO_PATH_FORMAT "/sys/class/gpio/gpio%d/%s" #define GPIO_EXPORT "/sys/class/gpio/export" #define GPIO_UNEXPORT "/sys/class/gpio/unexport" typedef enum { LOW = 0, HIGH = 1 } GPIO_Value; // 导出GPIO引脚 void gpio_export(int pin); // 取消导出GPIO引脚 void gpio_unexport(int pin); // 设置GPIO引脚为输入模式 void gpio_set_direction_in(int pin); // 设置GPIO引脚为输出模式 void gpio_set_direction_outMode(int pin); // 设置GPIO引脚为输出模式并设置电平 void gpio_set_direction_out(int pin, GPIO_Value value); // 读取GPIO引脚的状态 int gpio_get_value(int pin); #endif // GPIO_CONTROL_H
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
调用GPIO控制函数控制蜂鸣器发出警报或LED闪烁
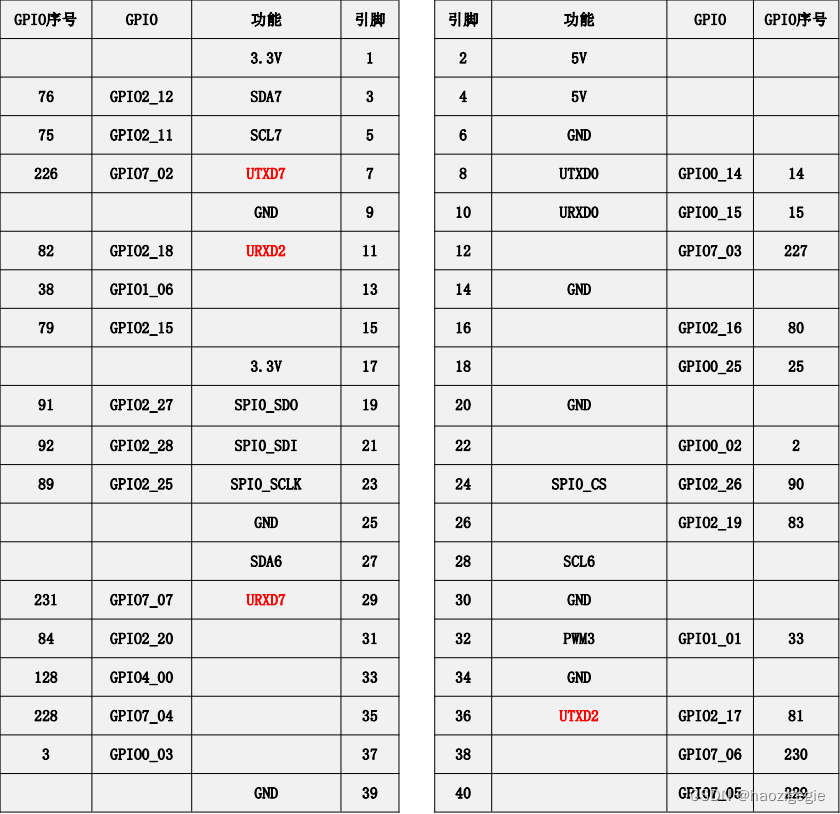
利用gpioControl.c和gpioControl.h文件,我们可以轻松的控制IO口输出高低电平或读取输入电平。查看官方用户手册的引脚图,我们发现左边倒数第二根引脚,也就是第37号引脚的GPIO序号是3,所以在代码中,我们使用的引脚序号应该是3而不是37。
buzzer.c
#include <stdio.h> #include "gpio_control.h" int main() { int pin = 3; // 对应第37号引脚 // 导出GPIO引脚 gpio_export(pin); // 循环控制GPIO高低电平 for (int i = 0; i < 3; i++) { gpio_set_direction_out(pin, HIGH); // 设置为高电平 sleep(1); // 延时1s gpio_set_direction_out(pin, LOW); // 设置为低电平 sleep(1); // 延时1s } // 取消导出GPIO引脚 gpio_unexport(pin); return 0; }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
此时,可以听到蜂鸣器每间接性响动,如果到了这步不能成功的话,大概率是因为你们之前下载了wiringOP这个库,导致引脚映射失败了,建议跟着前面的教程重新刷openEuler的镜像。
驱动OLED屏幕
有了前面操控引脚输出高低电平的方法后,现在只要操控引脚读取电平状态就能软件模拟IIC引脚,从而驱动OLED屏幕。这个使用C语言操控40pin引脚的方法不用安装任何库和配置环境,只需要上述代码就能随意操控IO口,使用左边倒数第四根引脚作为IIC_SCL引脚,即GPIO序号是128,左边倒数第2根作为IIC_SDA引脚,即GPIO序号是3。
oled.c
#include "oled.h" int pin_scl = 128; int pin_sda = 3; /************************************6*8的点阵************************************/ const unsigned F6x8[][6] = { 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, // sp 0x00, 0x00, 0x00, 0x2f, 0x00, 0x00, // ! 0x00, 0x00, 0x07, 0x00, 0x07, 0x00, // " 0x00, 0x14, 0x7f, 0x14, 0x7f, 0x14, // # 0x00, 0x24, 0x2a, 0x7f, 0x2a, 0x12, // $ 0x00, 0x62, 0x64, 0x08, 0x13, 0x23, // % 0x00, 0x36, 0x49, 0x55, 0x22, 0x50, // & 0x00, 0x00, 0x05, 0x03, 0x00, 0x00, // ' 0x00, 0x00, 0x1c, 0x22, 0x41, 0x00, // ( 0x00, 0x00, 0x41, 0x22, 0x1c, 0x00, // ) 0x00, 0x14, 0x08, 0x3E, 0x08, 0x14, // * 0x00, 0x08, 0x08, 0x3E, 0x08, 0x08, // + 0x00, 0x00, 0x00, 0xA0, 0x60, 0x00, // , 0x00, 0x08, 0x08, 0x08, 0x08, 0x08, // - 0x00, 0x00, 0x60, 0x60, 0x00, 0x00, // . 0x00, 0x20, 0x10, 0x08, 0x04, 0x02, // / 0x00, 0x3E, 0x51, 0x49, 0x45, 0x3E, // 0 0x00, 0x00, 0x42, 0x7F, 0x40, 0x00, // 1 0x00, 0x42, 0x61, 0x51, 0x49, 0x46, // 2 0x00, 0x21, 0x41, 0x45, 0x4B, 0x31, // 3 0x00, 0x18, 0x14, 0x12, 0x7F, 0x10, // 4 0x00, 0x27, 0x45, 0x45, 0x45, 0x39, // 5 0x00, 0x3C, 0x4A, 0x49, 0x49, 0x30, // 6 0x00, 0x01, 0x71, 0x09, 0x05, 0x03, // 7 0x00, 0x36, 0x49, 0x49, 0x49, 0x36, // 8 0x00, 0x06, 0x49, 0x49, 0x29, 0x1E, // 9 0x00, 0x00, 0x36, 0x36, 0x00, 0x00, // : 0x00, 0x00, 0x56, 0x36, 0x00, 0x00, // ; 0x00, 0x08, 0x14, 0x22, 0x41, 0x00, // < 0x00, 0x14, 0x14, 0x14, 0x14, 0x14, // = 0x00, 0x00, 0x41, 0x22, 0x14, 0x08, // > 0x00, 0x02, 0x01, 0x51, 0x09, 0x06, // ? 0x00, 0x32, 0x49, 0x59, 0x51, 0x3E, // @ 0x00, 0x7C, 0x12, 0x11, 0x12, 0x7C, // A 0x00, 0x7F, 0x49, 0x49, 0x49, 0x36, // B 0x00, 0x3E, 0x41, 0x41, 0x41, 0x22, // C 0x00, 0x7F, 0x41, 0x41, 0x22, 0x1C, // D 0x00, 0x7F, 0x49, 0x49, 0x49, 0x41, // E 0x00, 0x7F, 0x09, 0x09, 0x09, 0x01, // F 0x00, 0x3E, 0x41, 0x49, 0x49, 0x7A, // G 0x00, 0x7F, 0x08, 0x08, 0x08, 0x7F, // H 0x00, 0x00, 0x41, 0x7F, 0x41, 0x00, // I 0x00, 0x20, 0x40, 0x41, 0x3F, 0x01, // J 0x00, 0x7F, 0x08, 0x14, 0x22, 0x41, // K 0x00, 0x7F, 0x40, 0x40, 0x40, 0x40, // L 0x00, 0x7F, 0x02, 0x0C, 0x02, 0x7F, // M 0x00, 0x7F, 0x04, 0x08, 0x10, 0x7F, // N 0x00, 0x3E, 0x41, 0x41, 0x41, 0x3E, // O 0x00, 0x7F, 0x09, 0x09, 0x09, 0x06, // P 0x00, 0x3E, 0x41, 0x51, 0x21, 0x5E, // Q 0x00, 0x7F, 0x09, 0x19, 0x29, 0x46, // R 0x00, 0x46, 0x49, 0x49, 0x49, 0x31, // S 0x00, 0x01, 0x01, 0x7F, 0x01, 0x01, // T 0x00, 0x3F, 0x40, 0x40, 0x40, 0x3F, // U 0x00, 0x1F, 0x20, 0x40, 0x20, 0x1F, // V 0x00, 0x3F, 0x40, 0x38, 0x40, 0x3F, // W 0x00, 0x63, 0x14, 0x08, 0x14, 0x63, // X 0x00, 0x07, 0x08, 0x70, 0x08, 0x07, // Y 0x00, 0x61, 0x51, 0x49, 0x45, 0x43, // Z 0x00, 0x00, 0x7F, 0x41, 0x41, 0x00, // [ 0x00, 0x55, 0x2A, 0x55, 0x2A, 0x55, // 55 0x00, 0x00, 0x41, 0x41, 0x7F, 0x00, // ] 0x00, 0x04, 0x02, 0x01, 0x02, 0x04, // ^ 0x00, 0x40, 0x40, 0x40, 0x40, 0x40, // _ 0x00, 0x00, 0x01, 0x02, 0x04, 0x00, // ' 0x00, 0x20, 0x54, 0x54, 0x54, 0x78, // a 0x00, 0x7F, 0x48, 0x44, 0x44, 0x38, // b 0x00, 0x38, 0x44, 0x44, 0x44, 0x20, // c 0x00, 0x38, 0x44, 0x44, 0x48, 0x7F, // d 0x00, 0x38, 0x54, 0x54, 0x54, 0x18, // e 0x00, 0x08, 0x7E, 0x09, 0x01, 0x02, // f 0x00, 0x18, 0xA4, 0xA4, 0xA4, 0x7C, // g 0x00, 0x7F, 0x08, 0x04, 0x04, 0x78, // h 0x00, 0x00, 0x44, 0x7D, 0x40, 0x00, // i 0x00, 0x40, 0x80, 0x84, 0x7D, 0x00, // j 0x00, 0x7F, 0x10, 0x28, 0x44, 0x00, // k 0x00, 0x00, 0x41, 0x7F, 0x40, 0x00, // l 0x00, 0x7C, 0x04, 0x18, 0x04, 0x78, // m 0x00, 0x7C, 0x08, 0x04, 0x04, 0x78, // n 0x00, 0x38, 0x44, 0x44, 0x44, 0x38, // o 0x00, 0xFC, 0x24, 0x24, 0x24, 0x18, // p 0x00, 0x18, 0x24, 0x24, 0x18, 0xFC, // q 0x00, 0x7C, 0x08, 0x04, 0x04, 0x08, // r 0x00, 0x48, 0x54, 0x54, 0x54, 0x20, // s 0x00, 0x04, 0x3F, 0x44, 0x40, 0x20, // t 0x00, 0x3C, 0x40, 0x40, 0x20, 0x7C, // u 0x00, 0x1C, 0x20, 0x40, 0x20, 0x1C, // v 0x00, 0x3C, 0x40, 0x30, 0x40, 0x3C, // w 0x00, 0x44, 0x28, 0x10, 0x28, 0x44, // x 0x00, 0x1C, 0xA0, 0xA0, 0xA0, 0x7C, // y 0x00, 0x44, 0x64, 0x54, 0x4C, 0x44, // z 0x14, 0x14, 0x14, 0x14, 0x14, 0x14, // horiz lines }; /****************************************8*16的点阵************************************/ unsigned char F8X16[] = { 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, // 0 0x00, 0x00, 0x00, 0xF8, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x33, 0x30, 0x00, 0x00, 0x00, //! 1 0x00, 0x10, 0x0C, 0x06, 0x10, 0x0C, 0x06, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, //" 2 0x40, 0xC0, 0x78, 0x40, 0xC0, 0x78, 0x40, 0x00, 0x04, 0x3F, 0x04, 0x04, 0x3F, 0x04, 0x04, 0x00, // # 3 0x00, 0x70, 0x88, 0xFC, 0x08, 0x30, 0x00, 0x00, 0x00, 0x18, 0x20, 0xFF, 0x21, 0x1E, 0x00, 0x00, //$ 4 0xF0, 0x08, 0xF0, 0x00, 0xE0, 0x18, 0x00, 0x00, 0x00, 0x21, 0x1C, 0x03, 0x1E, 0x21, 0x1E, 0x00, //% 5 0x00, 0xF0, 0x08, 0x88, 0x70, 0x00, 0x00, 0x00, 0x1E, 0x21, 0x23, 0x24, 0x19, 0x27, 0x21, 0x10, //& 6 0x10, 0x16, 0x0E, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, //' 7 0x00, 0x00, 0x00, 0xE0, 0x18, 0x04, 0x02, 0x00, 0x00, 0x00, 0x00, 0x07, 0x18, 0x20, 0x40, 0x00, //( 8 0x00, 0x02, 0x04, 0x18, 0xE0, 0x00, 0x00, 0x00, 0x00, 0x40, 0x20, 0x18, 0x07, 0x00, 0x00, 0x00, //) 9 0x40, 0x40, 0x80, 0xF0, 0x80, 0x40, 0x40, 0x00, 0x02, 0x02, 0x01, 0x0F, 0x01, 0x02, 0x02, 0x00, //* 10 0x00, 0x00, 0x00, 0xF0, 0x00, 0x00, 0x00, 0x00, 0x01, 0x01, 0x01, 0x1F, 0x01, 0x01, 0x01, 0x00, //+ 11 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x80, 0xB0, 0x70, 0x00, 0x00, 0x00, 0x00, 0x00, //, 12 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x01, 0x01, 0x01, 0x01, 0x01, 0x01, 0x01, //- 13 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x30, 0x30, 0x00, 0x00, 0x00, 0x00, 0x00, //. 14 0x00, 0x00, 0x00, 0x00, 0x80, 0x60, 0x18, 0x04, 0x00, 0x60, 0x18, 0x06, 0x01, 0x00, 0x00, 0x00, /// 15 0x00, 0xE0, 0x10, 0x08, 0x08, 0x10, 0xE0, 0x00, 0x00, 0x0F, 0x10, 0x20, 0x20, 0x10, 0x0F, 0x00, // 0 16 0x00, 0x10, 0x10, 0xF8, 0x00, 0x00, 0x00, 0x00, 0x00, 0x20, 0x20, 0x3F, 0x20, 0x20, 0x00, 0x00, // 1 17 0x00, 0x70, 0x08, 0x08, 0x08, 0x88, 0x70, 0x00, 0x00, 0x30, 0x28, 0x24, 0x22, 0x21, 0x30, 0x00, // 2 18 0x00, 0x30, 0x08, 0x88, 0x88, 0x48, 0x30, 0x00, 0x00, 0x18, 0x20, 0x20, 0x20, 0x11, 0x0E, 0x00, // 3 19 0x00, 0x00, 0xC0, 0x20, 0x10, 0xF8, 0x00, 0x00, 0x00, 0x07, 0x04, 0x24, 0x24, 0x3F, 0x24, 0x00, // 4 20 0x00, 0xF8, 0x08, 0x88, 0x88, 0x08, 0x08, 0x00, 0x00, 0x19, 0x21, 0x20, 0x20, 0x11, 0x0E, 0x00, // 5 21 0x00, 0xE0, 0x10, 0x88, 0x88, 0x18, 0x00, 0x00, 0x00, 0x0F, 0x11, 0x20, 0x20, 0x11, 0x0E, 0x00, // 6 22 0x00, 0x38, 0x08, 0x08, 0xC8, 0x38, 0x08, 0x00, 0x00, 0x00, 0x00, 0x3F, 0x00, 0x00, 0x00, 0x00, // 7 23 0x00, 0x70, 0x88, 0x08, 0x08, 0x88, 0x70, 0x00, 0x00, 0x1C, 0x22, 0x21, 0x21, 0x22, 0x1C, 0x00, // 8 24 0x00, 0xE0, 0x10, 0x08, 0x08, 0x10, 0xE0, 0x00, 0x00, 0x00, 0x31, 0x22, 0x22, 0x11, 0x0F, 0x00, // 9 25 0x00, 0x00, 0x00, 0xC0, 0xC0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x30, 0x30, 0x00, 0x00, 0x00, //: 26 0x00, 0x00, 0x00, 0x80, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x80, 0x60, 0x00, 0x00, 0x00, 0x00, //; 27 0x00, 0x00, 0x80, 0x40, 0x20, 0x10, 0x08, 0x00, 0x00, 0x01, 0x02, 0x04, 0x08, 0x10, 0x20, 0x00, //< 28 0x40, 0x40, 0x40, 0x40, 0x40, 0x40, 0x40, 0x00, 0x04, 0x04, 0x04, 0x04, 0x04, 0x04, 0x04, 0x00, //= 29 0x00, 0x08, 0x10, 0x20, 0x40, 0x80, 0x00, 0x00, 0x00, 0x20, 0x10, 0x08, 0x04, 0x02, 0x01, 0x00, //> 30 0x00, 0x70, 0x48, 0x08, 0x08, 0x08, 0xF0, 0x00, 0x00, 0x00, 0x00, 0x30, 0x36, 0x01, 0x00, 0x00, //? 31 0xC0, 0x30, 0xC8, 0x28, 0xE8, 0x10, 0xE0, 0x00, 0x07, 0x18, 0x27, 0x24, 0x23, 0x14, 0x0B, 0x00, //@ 32 0x00, 0x00, 0xC0, 0x38, 0xE0, 0x00, 0x00, 0x00, 0x20, 0x3C, 0x23, 0x02, 0x02, 0x27, 0x38, 0x20, // A 33 0x08, 0xF8, 0x88, 0x88, 0x88, 0x70, 0x00, 0x00, 0x20, 0x3F, 0x20, 0x20, 0x20, 0x11, 0x0E, 0x00, // B 34 0xC0, 0x30, 0x08, 0x08, 0x08, 0x08, 0x38, 0x00, 0x07, 0x18, 0x20, 0x20, 0x20, 0x10, 0x08, 0x00, // C 35 0x08, 0xF8, 0x08, 0x08, 0x08, 0x10, 0xE0, 0x00, 0x20, 0x3F, 0x20, 0x20, 0x20, 0x10, 0x0F, 0x00, // D 36 0x08, 0xF8, 0x88, 0x88, 0xE8, 0x08, 0x10, 0x00, 0x20, 0x3F, 0x20, 0x20, 0x23, 0x20, 0x18, 0x00, // E 37 0x08, 0xF8, 0x88, 0x88, 0xE8, 0x08, 0x10, 0x00, 0x20, 0x3F, 0x20, 0x00, 0x03, 0x00, 0x00, 0x00, // F 38 0xC0, 0x30, 0x08, 0x08, 0x08, 0x38, 0x00, 0x00, 0x07, 0x18, 0x20, 0x20, 0x22, 0x1E, 0x02, 0x00, // G 39 0x08, 0xF8, 0x08, 0x00, 0x00, 0x08, 0xF8, 0x08, 0x20, 0x3F, 0x21, 0x01, 0x01, 0x21, 0x3F, 0x20, // H 40 0x00, 0x08, 0x08, 0xF8, 0x08, 0x08, 0x00, 0x00, 0x00, 0x20, 0x20, 0x3F, 0x20, 0x20, 0x00, 0x00, // I 41 0x00, 0x00, 0x08, 0x08, 0xF8, 0x08, 0x08, 0x00, 0xC0, 0x80, 0x80, 0x80, 0x7F, 0x00, 0x00, 0x00, // J 42 0x08, 0xF8, 0x88, 0xC0, 0x28, 0x18, 0x08, 0x00, 0x20, 0x3F, 0x20, 0x01, 0x26, 0x38, 0x20, 0x00, // K 43 0x08, 0xF8, 0x08, 0x00, 0x00, 0x00, 0x00, 0x00, 0x20, 0x3F, 0x20, 0x20, 0x20, 0x20, 0x30, 0x00, // L 44 0x08, 0xF8, 0xF8, 0x00, 0xF8, 0xF8, 0x08, 0x00, 0x20, 0x3F, 0x00, 0x3F, 0x00, 0x3F, 0x20, 0x00, // M 45 0x08, 0xF8, 0x30, 0xC0, 0x00, 0x08, 0xF8, 0x08, 0x20, 0x3F, 0x20, 0x00, 0x07, 0x18, 0x3F, 0x00, // N 46 0xE0, 0x10, 0x08, 0x08, 0x08, 0x10, 0xE0, 0x00, 0x0F, 0x10, 0x20, 0x20, 0x20, 0x10, 0x0F, 0x00, // O 47 0x08, 0xF8, 0x08, 0x08, 0x08, 0x08, 0xF0, 0x00, 0x20, 0x3F, 0x21, 0x01, 0x01, 0x01, 0x00, 0x00, // P 48 0xE0, 0x10, 0x08, 0x08, 0x08, 0x10, 0xE0, 0x00, 0x0F, 0x18, 0x24, 0x24, 0x38, 0x50, 0x4F, 0x00, // Q 49 0x08, 0xF8, 0x88, 0x88, 0x88, 0x88, 0x70, 0x00, 0x20, 0x3F, 0x20, 0x00, 0x03, 0x0C, 0x30, 0x20, // R 50 0x00, 0x70, 0x88, 0x08, 0x08, 0x08, 0x38, 0x00, 0x00, 0x38, 0x20, 0x21, 0x21, 0x22, 0x1C, 0x00, // S 51 0x18, 0x08, 0x08, 0xF8, 0x08, 0x08, 0x18, 0x00, 0x00, 0x00, 0x20, 0x3F, 0x20, 0x00, 0x00, 0x00, // T 52 0x08, 0xF8, 0x08, 0x00, 0x00, 0x08, 0xF8, 0x08, 0x00, 0x1F, 0x20, 0x20, 0x20, 0x20, 0x1F, 0x00, // U 53 0x08, 0x78, 0x88, 0x00, 0x00, 0xC8, 0x38, 0x08, 0x00, 0x00, 0x07, 0x38, 0x0E, 0x01, 0x00, 0x00, // V 54 0xF8, 0x08, 0x00, 0xF8, 0x00, 0x08, 0xF8, 0x00, 0x03, 0x3C, 0x07, 0x00, 0x07, 0x3C, 0x03, 0x00, // W 55 0x08, 0x18, 0x68, 0x80, 0x80, 0x68, 0x18, 0x08, 0x20, 0x30, 0x2C, 0x03, 0x03, 0x2C, 0x30, 0x20, // X 56 0x08, 0x38, 0xC8, 0x00, 0xC8, 0x38, 0x08, 0x00, 0x00, 0x00, 0x20, 0x3F, 0x20, 0x00, 0x00, 0x00, // Y 57 0x10, 0x08, 0x08, 0x08, 0xC8, 0x38, 0x08, 0x00, 0x20, 0x38, 0x26, 0x21, 0x20, 0x20, 0x18, 0x00, // Z 58 0x00, 0x00, 0x00, 0xFE, 0x02, 0x02, 0x02, 0x00, 0x00, 0x00, 0x00, 0x7F, 0x40, 0x40, 0x40, 0x00, //[ 59 0x00, 0x0C, 0x30, 0xC0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x01, 0x06, 0x38, 0xC0, 0x00, //\ 60 0x00, 0x02, 0x02, 0x02, 0xFE, 0x00, 0x00, 0x00, 0x00, 0x40, 0x40, 0x40, 0x7F, 0x00, 0x00, 0x00, //] 61 0x00, 0x00, 0x04, 0x02, 0x02, 0x02, 0x04, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, //^ 62 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x80, 0x80, 0x80, 0x80, 0x80, 0x80, 0x80, 0x80, //_ 63 0x00, 0x02, 0x02, 0x04, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, //` 64 0x00, 0x00, 0x80, 0x80, 0x80, 0x80, 0x00, 0x00, 0x00, 0x19, 0x24, 0x22, 0x22, 0x22, 0x3F, 0x20, // a 65 0x08, 0xF8, 0x00, 0x80, 0x80, 0x00, 0x00, 0x00, 0x00, 0x3F, 0x11, 0x20, 0x20, 0x11, 0x0E, 0x00, // b 66 0x00, 0x00, 0x00, 0x80, 0x80, 0x80, 0x00, 0x00, 0x00, 0x0E, 0x11, 0x20, 0x20, 0x20, 0x11, 0x00, // c 67 0x00, 0x00, 0x00, 0x80, 0x80, 0x88, 0xF8, 0x00, 0x00, 0x0E, 0x11, 0x20, 0x20, 0x10, 0x3F, 0x20, // d 68 0x00, 0x00, 0x80, 0x80, 0x80, 0x80, 0x00, 0x00, 0x00, 0x1F, 0x22, 0x22, 0x22, 0x22, 0x13, 0x00, // e 69 0x00, 0x80, 0x80, 0xF0, 0x88, 0x88, 0x88, 0x18, 0x00, 0x20, 0x20, 0x3F, 0x20, 0x20, 0x00, 0x00, // f 70 0x00, 0x00, 0x80, 0x80, 0x80, 0x80, 0x80, 0x00, 0x00, 0x6B, 0x94, 0x94, 0x94, 0x93, 0x60, 0x00, // g 71 0x08, 0xF8, 0x00, 0x80, 0x80, 0x80, 0x00, 0x00, 0x20, 0x3F, 0x21, 0x00, 0x00, 0x20, 0x3F, 0x20, // h 72 0x00, 0x80, 0x98, 0x98, 0x00, 0x00, 0x00, 0x00, 0x00, 0x20, 0x20, 0x3F, 0x20, 0x20, 0x00, 0x00, // i 73 0x00, 0x00, 0x00, 0x80, 0x98, 0x98, 0x00, 0x00, 0x00, 0xC0, 0x80, 0x80, 0x80, 0x7F, 0x00, 0x00, // j 74 0x08, 0xF8, 0x00, 0x00, 0x80, 0x80, 0x80, 0x00, 0x20, 0x3F, 0x24, 0x02, 0x2D, 0x30, 0x20, 0x00, // k 75 0x00, 0x08, 0x08, 0xF8, 0x00, 0x00, 0x00, 0x00, 0x00, 0x20, 0x20, 0x3F, 0x20, 0x20, 0x00, 0x00, // l 76 0x80, 0x80, 0x80, 0x80, 0x80, 0x80, 0x80, 0x00, 0x20, 0x3F, 0x20, 0x00, 0x3F, 0x20, 0x00, 0x3F, // m 77 0x80, 0x80, 0x00, 0x80, 0x80, 0x80, 0x00, 0x00, 0x20, 0x3F, 0x21, 0x00, 0x00, 0x20, 0x3F, 0x20, // n 78 0x00, 0x00, 0x80, 0x80, 0x80, 0x80, 0x00, 0x00, 0x00, 0x1F, 0x20, 0x20, 0x20, 0x20, 0x1F, 0x00, // o 79 0x80, 0x80, 0x00, 0x80, 0x80, 0x00, 0x00, 0x00, 0x80, 0xFF, 0xA1, 0x20, 0x20, 0x11, 0x0E, 0x00, // p 80 0x00, 0x00, 0x00, 0x80, 0x80, 0x80, 0x80, 0x00, 0x00, 0x0E, 0x11, 0x20, 0x20, 0xA0, 0xFF, 0x80, // q 81 0x80, 0x80, 0x80, 0x00, 0x80, 0x80, 0x80, 0x00, 0x20, 0x20, 0x3F, 0x21, 0x20, 0x00, 0x01, 0x00, // r 82 0x00, 0x00, 0x80, 0x80, 0x80, 0x80, 0x80, 0x00, 0x00, 0x33, 0x24, 0x24, 0x24, 0x24, 0x19, 0x00, // s 83 0x00, 0x80, 0x80, 0xE0, 0x80, 0x80, 0x00, 0x00, 0x00, 0x00, 0x00, 0x1F, 0x20, 0x20, 0x00, 0x00, // t 84 0x80, 0x80, 0x00, 0x00, 0x00, 0x80, 0x80, 0x00, 0x00, 0x1F, 0x20, 0x20, 0x20, 0x10, 0x3F, 0x20, // u 85 0x80, 0x80, 0x80, 0x00, 0x00, 0x80, 0x80, 0x80, 0x00, 0x01, 0x0E, 0x30, 0x08, 0x06, 0x01, 0x00, // v 86 0x80, 0x80, 0x00, 0x80, 0x00, 0x80, 0x80, 0x80, 0x0F, 0x30, 0x0C, 0x03, 0x0C, 0x30, 0x0F, 0x00, // w 87 0x00, 0x80, 0x80, 0x00, 0x80, 0x80, 0x80, 0x00, 0x00, 0x20, 0x31, 0x2E, 0x0E, 0x31, 0x20, 0x00, // x 88 0x80, 0x80, 0x80, 0x00, 0x00, 0x80, 0x80, 0x80, 0x80, 0x81, 0x8E, 0x70, 0x18, 0x06, 0x01, 0x00, // y 89 0x00, 0x80, 0x80, 0x80, 0x80, 0x80, 0x80, 0x00, 0x00, 0x21, 0x30, 0x2C, 0x22, 0x21, 0x30, 0x00, // z 90 0x00, 0x00, 0x00, 0x00, 0x80, 0x7C, 0x02, 0x02, 0x00, 0x00, 0x00, 0x00, 0x00, 0x3F, 0x40, 0x40, //{ 91 0x00, 0x00, 0x00, 0x00, 0xFF, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0xFF, 0x00, 0x00, 0x00, //| 92 0x00, 0x02, 0x02, 0x7C, 0x80, 0x00, 0x00, 0x00, 0x00, 0x40, 0x40, 0x3F, 0x00, 0x00, 0x00, 0x00, //} 93 0x00, 0x06, 0x01, 0x01, 0x02, 0x02, 0x04, 0x04, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, //~ 94 }; void OLED_I2C_Delay(unsigned int t) { usleep(t); } void OLED_I2C_Start(void) { gpio_set_direction_outMode(pin_sda); OLED_SDA_HIGH; // 发送起始条件的数据信号 OLED_SCL_HIGH; OLED_I2C_Delay(5); // 起始条件建立时间大于4.7us,延时 OLED_SDA_LOW; // 发送起始信号 OLED_I2C_Delay(5); // 起始条件锁定时间大于4μs OLED_SCL_LOW; // 钳住I2C总线,准备发送或接收数据 OLED_I2C_Delay(5); } void OLED_I2C_Stop(void) { gpio_set_direction_outMode(pin_sda); OLED_SDA_LOW; // 发送结束条件的数据信号 OLED_SCL_LOW; OLED_I2C_Delay(5); OLED_SCL_HIGH; // 发送结束条件的时钟信号 OLED_I2C_Delay(5); // 结束条件建立时间大于4μs OLED_SDA_HIGH; // 发送I2C总线结束信号 OLED_I2C_Delay(5); } unsigned char OLED_I2C_Write_Byte(unsigned char writeByte) { unsigned char i; gpio_set_direction_outMode(pin_sda); OLED_SCL_LOW; OLED_I2C_Delay(5); for (i = 0; i < 8; i++) // 要传送的数据长度为8位 { if (writeByte & 0x80) // 判断发送位 { OLED_SDA_HIGH; } else { OLED_SDA_LOW; } OLED_I2C_Delay(5); OLED_SCL_HIGH; // 输出SDA稳定后,拉高SCL给出上升沿,从机检测到后进行数据采样 OLED_I2C_Delay(5); // 保证时钟高电平周期大于4μs OLED_SCL_LOW; OLED_I2C_Delay(5); writeByte <<= 1; } OLED_I2C_Delay(1); OLED_SDA_HIGH; // 8位发送完后释放数据线,准备接收应答位-ZLG OLED_I2C_Delay(5); OLED_SCL_HIGH; // MCU告知SHT2X数据发送完毕,等待从机的应答信号 OLED_I2C_Delay(5); gpio_set_direction_in(pin_sda); /*以下是判断I2C总线接收应到应答信号是ACK还是NACK*/ if (gpio_get_value(pin_sda) == 1) // SDA为高,收到NACK { OLED_I2C_Delay(5); OLED_SCL_LOW; return NACK; } else // SDA为低,收到ACK { OLED_I2C_Delay(5); OLED_SCL_LOW; return ACK; } } unsigned char OLED_I2C_Read_Byte(unsigned char ackValue) { unsigned char i = 0; unsigned char readByte = 0; gpio_set_direction_outMode(pin_sda); OLED_SCL_LOW; // 置时钟线为低,准备接收数据位 OLED_I2C_Delay(5); OLED_SDA_HIGH; // 释放总线,置数据线为输入方式 gpio_set_direction_in(pin_sda); for (i = 0; i < 8; i++) { OLED_SCL_HIGH; // SCL高电平期间,采集SDA信号,并作为有效数据 //置时钟线为高使数据线上数据有效 OLED_I2C_Delay(5); readByte <<= 1; // 移位 if (gpio_get_value(pin_sda) == 1) // 采样获取数据 { readByte |= 0x01; } else { readByte &= 0xfe; } OLED_I2C_Delay(5); OLED_SCL_LOW; // 下降沿,从机给出下一位值 OLED_I2C_Delay(5); } gpio_set_direction_outMode(pin_sda); /*以下是I2C总线发送应答信号ACK或者NACK*/ gpio_set_direction_out(pin_sda,ackValue); OLED_I2C_Delay(5); OLED_SCL_HIGH; OLED_I2C_Delay(5); // 时钟低电平周期大于4μs OLED_SCL_LOW; // 清时钟线,钳住I2C总线以便继续接收 OLED_I2C_Delay(5); return readByte; } // OLED写入一条指令 void oledWriteCmd(char writeCmd) { OLED_I2C_Start(); OLED_I2C_Write_Byte(0x78); OLED_I2C_Write_Byte(0x00); OLED_I2C_Write_Byte(writeCmd); OLED_I2C_Stop(); } void oledWriteData(char writeData) { OLED_I2C_Start(); OLED_I2C_Write_Byte(0x78); OLED_I2C_Write_Byte(0x40); OLED_I2C_Write_Byte(writeData); OLED_I2C_Stop(); } // 更新显存到LCD void oled_Clear(void) { unsigned char i, n; for (i = 0; i < 8; i++) { oledWriteCmd(0xb0 + i); // 设置页地址(0~7) oledWriteCmd(0x00); // 设置显示位置—列低地址 oledWriteCmd(0x10); // 设置显示位置—列高地址 for (n = 0; n < 130; n++) { oledWriteData(0); } } OLED_I2C_Delay(500000); } // 开启OLED显示 void OLED_Display_On(void) { oledWriteCmd(0X8D); // SET DCDC命令 oledWriteCmd(0X14); // DCDC ON oledWriteCmd(0XAF); // DISPLAY ON } // 关闭OLED显示 void OLED_Display_Off(void) { oledWriteCmd(0XAE); // SET DCDC命令 oledWriteCmd(0X8D); // DCDC OFF oledWriteCmd(0X10); // DISPLAY OFF } // 设置光标 void OLED_Set_Pos(unsigned char x, unsigned char y) { oledWriteCmd(0xB0 + y); oledWriteCmd((x & 0x0f)); oledWriteCmd(((x & 0xf0) >> 4) | 0x10); } // 屏幕初始化函数 void oled_Init(void) { // 导出GPIO引脚 gpio_export(pin_scl); gpio_export(pin_sda); gpio_set_direction_out(pin_scl, HIGH); gpio_set_direction_out(pin_sda, HIGH); oledWriteCmd(0xAE); // 关闭显示 oledWriteCmd(0x00); // 设置时钟分频因子,震荡频率 oledWriteCmd(0x10); //[3:0],分频因子;[7:4],震荡频率 oledWriteCmd(0x40); // 设置驱动路数 oledWriteCmd(0xB0); // 默认0X3F(1/64) oledWriteCmd(0x81); // 默认为0 oledWriteCmd(0xFF); // 设置显示开始行 [5:0],行数. oledWriteCmd(0xA1); // 电荷泵设置 oledWriteCmd(0xA6); // bit2,开启/关闭 oledWriteCmd(0xA8); // 设置内存地址模式 oledWriteCmd(0x3F); //[1:0],00,列地址模式;01,行地址模式;10,页地址模式;默认10; oledWriteCmd(0xC8); // 段重定义设置,bit0:0,0->0;1,0->127; oledWriteCmd(0xD3); // 设置COM扫描方向;bit3:0,普通模式;1,重定义模式 COM[N-1]->COM0;N:驱动路数 oledWriteCmd(0x00); // 设置COM硬件引脚配置 oledWriteCmd(0xD5); //[5:4]配置 oledWriteCmd(0x80); // 对比度设置 oledWriteCmd(0xD9); // 1~255;默认0X7F (亮度设置,越大越亮) oledWriteCmd(0xF1); // 设置预充电周期 oledWriteCmd(0xDA); //[3:0],PHASE 1;[7:4],PHASE 2; oledWriteCmd(0x12); // 设置VCOMH 电压倍率 oledWriteCmd(0xDB); //[6:4] 000,0.65*vcc;001,0.77*vcc;011,0.83*vcc oledWriteCmd(0x40); // 全局显示开启;bit0:1,开启;0,关闭;(白屏/黑屏) oledWriteCmd(0x8D); // 设置显示方式;bit0:1,反相显示;0,正常显示 oledWriteCmd(0x14); // 开启显示 oledWriteCmd(0xAF); // 开启显示 OLED_Clear(); OLED_Set_Pos(0, 0); oled_Clear(); } void oled_DeInit(void) { gpio_unexport(pin_scl); gpio_unexport(pin_sda); } // 在指定位置显示一个字符,包括部分字符 // x:0~127 // y:0~63 // mode:0,反白显示;1,正常显示 // size:选择字体 16/12 void OLED_ShowChar(unsigned char x, unsigned char y, unsigned char chr) { unsigned char c = 0, i = 0; c = chr - ' '; if (x > Max_Column) { x = 0; y = y + 2; } if (SIZE == 16) // ×Ö·û´óСÈç¹ûΪ16 =8 *16 { OLED_Set_Pos(x, y); // ´Óx,y¿ªÊ¼»µã for (i = 0; i < 8; i++) { oledWriteData(F8X16[c * 16 + i]); } OLED_Set_Pos(x, y + 1); // ´Óx,y¿ªÊ¼»µã for (i = 0; i < 8; i++) { oledWriteData(F8X16[c * 16 + i + 8]); } } else // 6 =6*8 { OLED_Set_Pos(x, y); for (i = 0; i < 6; i++) oledWriteData(F6x8[c][i]); } } // 显示字符串 // x,y:起点坐标 // size:字体大小 //*p:字符串起始地址 void oled_ShowString(unsigned char x, unsigned char y, const unsigned char *chr) { unsigned char j = 0; while (chr[j] != '\0') { OLED_ShowChar(x, y, chr[j]); x += 8; if (x >= 128) { x = 0; y += 2; } j++; } } void main() { oled_Init(); oled_ShowString(0,0,"jiangxiaoya"); oled_DeInit(); }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
- 190
- 191
- 192
- 193
- 194
- 195
- 196
- 197
- 198
- 199
- 200
- 201
- 202
- 203
- 204
- 205
- 206
- 207
- 208
- 209
- 210
- 211
- 212
- 213
- 214
- 215
- 216
- 217
- 218
- 219
- 220
- 221
- 222
- 223
- 224
- 225
- 226
- 227
- 228
- 229
- 230
- 231
- 232
- 233
- 234
- 235
- 236
- 237
- 238
- 239
- 240
- 241
- 242
- 243
- 244
- 245
- 246
- 247
- 248
- 249
- 250
- 251
- 252
- 253
- 254
- 255
- 256
- 257
- 258
- 259
- 260
- 261
- 262
- 263
- 264
- 265
- 266
- 267
- 268
- 269
- 270
- 271
- 272
- 273
- 274
- 275
- 276
- 277
- 278
- 279
- 280
- 281
- 282
- 283
- 284
- 285
- 286
- 287
- 288
- 289
- 290
- 291
- 292
- 293
- 294
- 295
- 296
- 297
- 298
- 299
- 300
- 301
- 302
- 303
- 304
- 305
- 306
- 307
- 308
- 309
- 310
- 311
- 312
- 313
- 314
- 315
- 316
- 317
- 318
- 319
- 320
- 321
- 322
- 323
- 324
- 325
- 326
- 327
- 328
- 329
- 330
- 331
- 332
- 333
- 334
- 335
- 336
- 337
- 338
- 339
- 340
- 341
- 342
- 343
- 344
- 345
- 346
- 347
- 348
- 349
- 350
- 351
- 352
- 353
- 354
- 355
- 356
- 357
- 358
- 359
- 360
- 361
- 362
- 363
- 364
- 365
- 366
- 367
- 368
- 369
- 370
- 371
- 372
- 373
- 374
- 375
- 376
- 377
- 378
- 379
- 380
- 381
- 382
- 383
- 384
- 385
- 386
- 387
- 388
- 389
- 390
- 391
- 392
- 393
- 394
- 395
- 396
- 397
- 398
- 399
- 400
- 401
- 402
- 403
- 404
- 405
- 406
- 407
- 408
- 409
- 410
- 411
- 412
- 413
- 414
- 415
- 416
- 417
- 418
- 419
- 420
- 421
- 422
- 423
- 424
- 425
- 426
- 427
- 428
- 429
- 430
- 431
- 432
- 433
- 434
- 435
- 436
- 437
- 438
- 439
- 440
- 441
- 442
- 443
- 444
- 445
- 446
- 447
- 448
- 449
- 450
- 451
- 452
- 453
- 454
- 455
- 456
- 457
- 458
- 459
- 460
- 461
- 462
- 463
- 464
- 465
- 466
- 467
- 468
- 469
- 470
- 471
- 472
- 473
- 474
- 475
- 476
- 477
- 478
- 479
- 480
- 481
- 482
- 483
- 484
- 485
- 486
- 487
- 488
- 489
- 490
- 491
- 492
oled.h
#ifndef OLED_H #define OLED_H #include <stdio.h> #include "gpio_control.h" #define SIZE 16 // 字符大小 #define Max_Column 128 // 最大列数 #define OLED_IIC_ADDRESS 0x3C #define ACK 0 // 应答信号 #define NACK 1 // 非应答信号 #define OLED_SCL_HIGH gpio_set_direction_out(pin_scl, HIGH) #define OLED_SCL_LOW gpio_set_direction_out(pin_scl, LOW) #define OLED_SDA_HIGH gpio_set_direction_out(pin_sda, HIGH) #define OLED_SDA_LOW gpio_set_direction_out(pin_sda, LOW) void oled_Init(void); void oled_DeInit(void); void oled_Clear(void); void oled_ShowString(unsigned char x, unsigned char y, const unsigned char *chr); #endif // OLED_H
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
显示效果如下图:
它会有一个清屏函数,动图如下,清屏效果可能有点慢,动态图如下。
香橙派KunpengPro配置开机自启动使用OLED屏幕显示IP地址
写一个自动获取IP的程序
文件列表
程序文件列表如下:
clear.c:主要是清除引脚的使用,后面会将clear.c单独gcc编译成可执行文件clear,编译成功后可以将clear.c删掉了。
oled.c、oled.h
server.c、server.h
mainPro.c、mainPro.h
gpio_control.c和gpio_control.h
gpio_control.h
#ifndef GPIO_CONTROL_H #define GPIO_CONTROL_H #define GPIO_PATH_FORMAT "/sys/class/gpio/gpio%d/%s" #define GPIO_EXPORT "/sys/class/gpio/export" #define GPIO_UNEXPORT "/sys/class/gpio/unexport" typedef enum { LOW = 0, HIGH = 1 } GPIO_Value; // 导出GPIO引脚 void gpio_export(int pin); // 取消导出GPIO引脚 void gpio_unexport(int pin); // 设置GPIO引脚为输入模式 void gpio_set_direction_in(int pin); // 设置GPIO引脚为输出模式 void gpio_set_direction_outMode(int pin); // 设置GPIO引脚为输出模式并设置电平 void gpio_set_direction_out(int pin, GPIO_Value value); // 读取GPIO引脚的状态 int gpio_get_value(int pin); #endif // GPIO_CONTROL_H
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
gpio_control.c
#include "mainPro.h" void write_to_file(const char *filename, const char *value) { int fd = open(filename, O_WRONLY); if (fd < 0) { perror("open"); exit(EXIT_FAILURE); } if (write(fd, value, strlen(value)) < 0) { perror("write"); exit(EXIT_FAILURE); } close(fd); } void gpio_export(int pin) { char buffer[4]; snprintf(buffer, sizeof(buffer), "%d", pin); write_to_file(GPIO_EXPORT, buffer); usleep(100000); // 等待GPIO初始化完成 } void gpio_unexport(int pin) { char buffer[4]; snprintf(buffer, sizeof(buffer), "%d", pin); write_to_file(GPIO_UNEXPORT, buffer); } void gpio_set_direction_in(int pin) { char path[50]; snprintf(path, sizeof(path), GPIO_PATH_FORMAT, pin, "direction"); write_to_file(path, "in"); } void gpio_set_direction_outMode(int pin) { char path[50]; snprintf(path, sizeof(path), GPIO_PATH_FORMAT, pin, "direction"); write_to_file(path, "out"); } void gpio_set_direction_out(int pin, GPIO_Value value) { char path[50]; snprintf(path, sizeof(path), GPIO_PATH_FORMAT, pin, "direction"); write_to_file(path, "out"); snprintf(path, sizeof(path), GPIO_PATH_FORMAT, pin, "value"); write_to_file(path, value == HIGH ? "1" : "0"); } int gpio_get_value(int pin) { char path[50]; char value_str[3]; snprintf(path, sizeof(path), GPIO_PATH_FORMAT, pin, "value"); int fd = open(path, O_RDONLY); if (fd < 0) { perror("open"); exit(EXIT_FAILURE); } if (read(fd, value_str, sizeof(value_str)) < 0) { perror("read"); exit(EXIT_FAILURE); } close(fd); return atoi(value_str); }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
clear.c和可执行文件clear
clear.c
#include <stdio.h> #include <stdlib.h> #include <unistd.h> #include <fcntl.h> #include <string.h> #define GPIO_PATH_FORMAT "/sys/class/gpio/gpio%d/%s" #define GPIO_EXPORT "/sys/class/gpio/export" #define GPIO_UNEXPORT "/sys/class/gpio/unexport" void write_to_file(const char *filename, const char *value) { int fd = open(filename, O_WRONLY); if (fd < 0) { perror("open"); exit(EXIT_FAILURE); } if (write(fd, value, strlen(value)) < 0) { perror("write"); exit(EXIT_FAILURE); } close(fd); } void gpio_unexport(int pin) { char buffer[4]; snprintf(buffer, sizeof(buffer), "%d", pin); write_to_file(GPIO_UNEXPORT, buffer); } void main() { gpio_unexport(3); gpio_unexport(128); }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
clear可执行文件

oled.c和oled.h
oled.h
#ifndef OLED_H #define OLED_H #define SIZE 16 // 字符大小 #define Max_Column 128 // 最大列数 #define OLED_IIC_ADDRESS 0x3C #define ACK 0 // 应答信号 #define NACK 1 // 非应答信号 #define OLED_SCL_HIGH gpio_set_direction_out(pin_scl, HIGH) #define OLED_SCL_LOW gpio_set_direction_out(pin_scl, LOW) #define OLED_SDA_HIGH gpio_set_direction_out(pin_sda, HIGH) #define OLED_SDA_LOW gpio_set_direction_out(pin_sda, LOW) void oled_Init(void); void oled_DeInit(void); void oled_Clear(void); void oled_ShowString(unsigned char x, unsigned char y, const unsigned char *chr); #endif // OLED_H
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
oled.c
#include "mainPro.h" int pin_scl = 128; int pin_sda = 3; /************************************6*8的点阵************************************/ const unsigned F6x8[][6] = { 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, // sp 0x00, 0x00, 0x00, 0x2f, 0x00, 0x00, // ! 0x00, 0x00, 0x07, 0x00, 0x07, 0x00, // " 0x00, 0x14, 0x7f, 0x14, 0x7f, 0x14, // # 0x00, 0x24, 0x2a, 0x7f, 0x2a, 0x12, // $ 0x00, 0x62, 0x64, 0x08, 0x13, 0x23, // % 0x00, 0x36, 0x49, 0x55, 0x22, 0x50, // & 0x00, 0x00, 0x05, 0x03, 0x00, 0x00, // ' 0x00, 0x00, 0x1c, 0x22, 0x41, 0x00, // ( 0x00, 0x00, 0x41, 0x22, 0x1c, 0x00, // ) 0x00, 0x14, 0x08, 0x3E, 0x08, 0x14, // * 0x00, 0x08, 0x08, 0x3E, 0x08, 0x08, // + 0x00, 0x00, 0x00, 0xA0, 0x60, 0x00, // , 0x00, 0x08, 0x08, 0x08, 0x08, 0x08, // - 0x00, 0x00, 0x60, 0x60, 0x00, 0x00, // . 0x00, 0x20, 0x10, 0x08, 0x04, 0x02, // / 0x00, 0x3E, 0x51, 0x49, 0x45, 0x3E, // 0 0x00, 0x00, 0x42, 0x7F, 0x40, 0x00, // 1 0x00, 0x42, 0x61, 0x51, 0x49, 0x46, // 2 0x00, 0x21, 0x41, 0x45, 0x4B, 0x31, // 3 0x00, 0x18, 0x14, 0x12, 0x7F, 0x10, // 4 0x00, 0x27, 0x45, 0x45, 0x45, 0x39, // 5 0x00, 0x3C, 0x4A, 0x49, 0x49, 0x30, // 6 0x00, 0x01, 0x71, 0x09, 0x05, 0x03, // 7 0x00, 0x36, 0x49, 0x49, 0x49, 0x36, // 8 0x00, 0x06, 0x49, 0x49, 0x29, 0x1E, // 9 0x00, 0x00, 0x36, 0x36, 0x00, 0x00, // : 0x00, 0x00, 0x56, 0x36, 0x00, 0x00, // ; 0x00, 0x08, 0x14, 0x22, 0x41, 0x00, // < 0x00, 0x14, 0x14, 0x14, 0x14, 0x14, // = 0x00, 0x00, 0x41, 0x22, 0x14, 0x08, // > 0x00, 0x02, 0x01, 0x51, 0x09, 0x06, // ? 0x00, 0x32, 0x49, 0x59, 0x51, 0x3E, // @ 0x00, 0x7C, 0x12, 0x11, 0x12, 0x7C, // A 0x00, 0x7F, 0x49, 0x49, 0x49, 0x36, // B 0x00, 0x3E, 0x41, 0x41, 0x41, 0x22, // C 0x00, 0x7F, 0x41, 0x41, 0x22, 0x1C, // D 0x00, 0x7F, 0x49, 0x49, 0x49, 0x41, // E 0x00, 0x7F, 0x09, 0x09, 0x09, 0x01, // F 0x00, 0x3E, 0x41, 0x49, 0x49, 0x7A, // G 0x00, 0x7F, 0x08, 0x08, 0x08, 0x7F, // H 0x00, 0x00, 0x41, 0x7F, 0x41, 0x00, // I 0x00, 0x20, 0x40, 0x41, 0x3F, 0x01, // J 0x00, 0x7F, 0x08, 0x14, 0x22, 0x41, // K 0x00, 0x7F, 0x40, 0x40, 0x40, 0x40, // L 0x00, 0x7F, 0x02, 0x0C, 0x02, 0x7F, // M 0x00, 0x7F, 0x04, 0x08, 0x10, 0x7F, // N 0x00, 0x3E, 0x41, 0x41, 0x41, 0x3E, // O 0x00, 0x7F, 0x09, 0x09, 0x09, 0x06, // P 0x00, 0x3E, 0x41, 0x51, 0x21, 0x5E, // Q 0x00, 0x7F, 0x09, 0x19, 0x29, 0x46, // R 0x00, 0x46, 0x49, 0x49, 0x49, 0x31, // S 0x00, 0x01, 0x01, 0x7F, 0x01, 0x01, // T 0x00, 0x3F, 0x40, 0x40, 0x40, 0x3F, // U 0x00, 0x1F, 0x20, 0x40, 0x20, 0x1F, // V 0x00, 0x3F, 0x40, 0x38, 0x40, 0x3F, // W 0x00, 0x63, 0x14, 0x08, 0x14, 0x63, // X 0x00, 0x07, 0x08, 0x70, 0x08, 0x07, // Y 0x00, 0x61, 0x51, 0x49, 0x45, 0x43, // Z 0x00, 0x00, 0x7F, 0x41, 0x41, 0x00, // [ 0x00, 0x55, 0x2A, 0x55, 0x2A, 0x55, // 55 0x00, 0x00, 0x41, 0x41, 0x7F, 0x00, // ] 0x00, 0x04, 0x02, 0x01, 0x02, 0x04, // ^ 0x00, 0x40, 0x40, 0x40, 0x40, 0x40, // _ 0x00, 0x00, 0x01, 0x02, 0x04, 0x00, // ' 0x00, 0x20, 0x54, 0x54, 0x54, 0x78, // a 0x00, 0x7F, 0x48, 0x44, 0x44, 0x38, // b 0x00, 0x38, 0x44, 0x44, 0x44, 0x20, // c 0x00, 0x38, 0x44, 0x44, 0x48, 0x7F, // d 0x00, 0x38, 0x54, 0x54, 0x54, 0x18, // e 0x00, 0x08, 0x7E, 0x09, 0x01, 0x02, // f 0x00, 0x18, 0xA4, 0xA4, 0xA4, 0x7C, // g 0x00, 0x7F, 0x08, 0x04, 0x04, 0x78, // h 0x00, 0x00, 0x44, 0x7D, 0x40, 0x00, // i 0x00, 0x40, 0x80, 0x84, 0x7D, 0x00, // j 0x00, 0x7F, 0x10, 0x28, 0x44, 0x00, // k 0x00, 0x00, 0x41, 0x7F, 0x40, 0x00, // l 0x00, 0x7C, 0x04, 0x18, 0x04, 0x78, // m 0x00, 0x7C, 0x08, 0x04, 0x04, 0x78, // n 0x00, 0x38, 0x44, 0x44, 0x44, 0x38, // o 0x00, 0xFC, 0x24, 0x24, 0x24, 0x18, // p 0x00, 0x18, 0x24, 0x24, 0x18, 0xFC, // q 0x00, 0x7C, 0x08, 0x04, 0x04, 0x08, // r 0x00, 0x48, 0x54, 0x54, 0x54, 0x20, // s 0x00, 0x04, 0x3F, 0x44, 0x40, 0x20, // t 0x00, 0x3C, 0x40, 0x40, 0x20, 0x7C, // u 0x00, 0x1C, 0x20, 0x40, 0x20, 0x1C, // v 0x00, 0x3C, 0x40, 0x30, 0x40, 0x3C, // w 0x00, 0x44, 0x28, 0x10, 0x28, 0x44, // x 0x00, 0x1C, 0xA0, 0xA0, 0xA0, 0x7C, // y 0x00, 0x44, 0x64, 0x54, 0x4C, 0x44, // z 0x14, 0x14, 0x14, 0x14, 0x14, 0x14, // horiz lines }; /****************************************8*16的点阵************************************/ unsigned char F8X16[] = { 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, // 0 0x00, 0x00, 0x00, 0xF8, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x33, 0x30, 0x00, 0x00, 0x00, //! 1 0x00, 0x10, 0x0C, 0x06, 0x10, 0x0C, 0x06, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, //" 2 0x40, 0xC0, 0x78, 0x40, 0xC0, 0x78, 0x40, 0x00, 0x04, 0x3F, 0x04, 0x04, 0x3F, 0x04, 0x04, 0x00, // # 3 0x00, 0x70, 0x88, 0xFC, 0x08, 0x30, 0x00, 0x00, 0x00, 0x18, 0x20, 0xFF, 0x21, 0x1E, 0x00, 0x00, //$ 4 0xF0, 0x08, 0xF0, 0x00, 0xE0, 0x18, 0x00, 0x00, 0x00, 0x21, 0x1C, 0x03, 0x1E, 0x21, 0x1E, 0x00, //% 5 0x00, 0xF0, 0x08, 0x88, 0x70, 0x00, 0x00, 0x00, 0x1E, 0x21, 0x23, 0x24, 0x19, 0x27, 0x21, 0x10, //& 6 0x10, 0x16, 0x0E, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, //' 7 0x00, 0x00, 0x00, 0xE0, 0x18, 0x04, 0x02, 0x00, 0x00, 0x00, 0x00, 0x07, 0x18, 0x20, 0x40, 0x00, //( 8 0x00, 0x02, 0x04, 0x18, 0xE0, 0x00, 0x00, 0x00, 0x00, 0x40, 0x20, 0x18, 0x07, 0x00, 0x00, 0x00, //) 9 0x40, 0x40, 0x80, 0xF0, 0x80, 0x40, 0x40, 0x00, 0x02, 0x02, 0x01, 0x0F, 0x01, 0x02, 0x02, 0x00, //* 10 0x00, 0x00, 0x00, 0xF0, 0x00, 0x00, 0x00, 0x00, 0x01, 0x01, 0x01, 0x1F, 0x01, 0x01, 0x01, 0x00, //+ 11 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x80, 0xB0, 0x70, 0x00, 0x00, 0x00, 0x00, 0x00, //, 12 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x01, 0x01, 0x01, 0x01, 0x01, 0x01, 0x01, //- 13 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x30, 0x30, 0x00, 0x00, 0x00, 0x00, 0x00, //. 14 0x00, 0x00, 0x00, 0x00, 0x80, 0x60, 0x18, 0x04, 0x00, 0x60, 0x18, 0x06, 0x01, 0x00, 0x00, 0x00, /// 15 0x00, 0xE0, 0x10, 0x08, 0x08, 0x10, 0xE0, 0x00, 0x00, 0x0F, 0x10, 0x20, 0x20, 0x10, 0x0F, 0x00, // 0 16 0x00, 0x10, 0x10, 0xF8, 0x00, 0x00, 0x00, 0x00, 0x00, 0x20, 0x20, 0x3F, 0x20, 0x20, 0x00, 0x00, // 1 17 0x00, 0x70, 0x08, 0x08, 0x08, 0x88, 0x70, 0x00, 0x00, 0x30, 0x28, 0x24, 0x22, 0x21, 0x30, 0x00, // 2 18 0x00, 0x30, 0x08, 0x88, 0x88, 0x48, 0x30, 0x00, 0x00, 0x18, 0x20, 0x20, 0x20, 0x11, 0x0E, 0x00, // 3 19 0x00, 0x00, 0xC0, 0x20, 0x10, 0xF8, 0x00, 0x00, 0x00, 0x07, 0x04, 0x24, 0x24, 0x3F, 0x24, 0x00, // 4 20 0x00, 0xF8, 0x08, 0x88, 0x88, 0x08, 0x08, 0x00, 0x00, 0x19, 0x21, 0x20, 0x20, 0x11, 0x0E, 0x00, // 5 21 0x00, 0xE0, 0x10, 0x88, 0x88, 0x18, 0x00, 0x00, 0x00, 0x0F, 0x11, 0x20, 0x20, 0x11, 0x0E, 0x00, // 6 22 0x00, 0x38, 0x08, 0x08, 0xC8, 0x38, 0x08, 0x00, 0x00, 0x00, 0x00, 0x3F, 0x00, 0x00, 0x00, 0x00, // 7 23 0x00, 0x70, 0x88, 0x08, 0x08, 0x88, 0x70, 0x00, 0x00, 0x1C, 0x22, 0x21, 0x21, 0x22, 0x1C, 0x00, // 8 24 0x00, 0xE0, 0x10, 0x08, 0x08, 0x10, 0xE0, 0x00, 0x00, 0x00, 0x31, 0x22, 0x22, 0x11, 0x0F, 0x00, // 9 25 0x00, 0x00, 0x00, 0xC0, 0xC0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x30, 0x30, 0x00, 0x00, 0x00, //: 26 0x00, 0x00, 0x00, 0x80, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x80, 0x60, 0x00, 0x00, 0x00, 0x00, //; 27 0x00, 0x00, 0x80, 0x40, 0x20, 0x10, 0x08, 0x00, 0x00, 0x01, 0x02, 0x04, 0x08, 0x10, 0x20, 0x00, //< 28 0x40, 0x40, 0x40, 0x40, 0x40, 0x40, 0x40, 0x00, 0x04, 0x04, 0x04, 0x04, 0x04, 0x04, 0x04, 0x00, //= 29 0x00, 0x08, 0x10, 0x20, 0x40, 0x80, 0x00, 0x00, 0x00, 0x20, 0x10, 0x08, 0x04, 0x02, 0x01, 0x00, //> 30 0x00, 0x70, 0x48, 0x08, 0x08, 0x08, 0xF0, 0x00, 0x00, 0x00, 0x00, 0x30, 0x36, 0x01, 0x00, 0x00, //? 31 0xC0, 0x30, 0xC8, 0x28, 0xE8, 0x10, 0xE0, 0x00, 0x07, 0x18, 0x27, 0x24, 0x23, 0x14, 0x0B, 0x00, //@ 32 0x00, 0x00, 0xC0, 0x38, 0xE0, 0x00, 0x00, 0x00, 0x20, 0x3C, 0x23, 0x02, 0x02, 0x27, 0x38, 0x20, // A 33 0x08, 0xF8, 0x88, 0x88, 0x88, 0x70, 0x00, 0x00, 0x20, 0x3F, 0x20, 0x20, 0x20, 0x11, 0x0E, 0x00, // B 34 0xC0, 0x30, 0x08, 0x08, 0x08, 0x08, 0x38, 0x00, 0x07, 0x18, 0x20, 0x20, 0x20, 0x10, 0x08, 0x00, // C 35 0x08, 0xF8, 0x08, 0x08, 0x08, 0x10, 0xE0, 0x00, 0x20, 0x3F, 0x20, 0x20, 0x20, 0x10, 0x0F, 0x00, // D 36 0x08, 0xF8, 0x88, 0x88, 0xE8, 0x08, 0x10, 0x00, 0x20, 0x3F, 0x20, 0x20, 0x23, 0x20, 0x18, 0x00, // E 37 0x08, 0xF8, 0x88, 0x88, 0xE8, 0x08, 0x10, 0x00, 0x20, 0x3F, 0x20, 0x00, 0x03, 0x00, 0x00, 0x00, // F 38 0xC0, 0x30, 0x08, 0x08, 0x08, 0x38, 0x00, 0x00, 0x07, 0x18, 0x20, 0x20, 0x22, 0x1E, 0x02, 0x00, // G 39 0x08, 0xF8, 0x08, 0x00, 0x00, 0x08, 0xF8, 0x08, 0x20, 0x3F, 0x21, 0x01, 0x01, 0x21, 0x3F, 0x20, // H 40 0x00, 0x08, 0x08, 0xF8, 0x08, 0x08, 0x00, 0x00, 0x00, 0x20, 0x20, 0x3F, 0x20, 0x20, 0x00, 0x00, // I 41 0x00, 0x00, 0x08, 0x08, 0xF8, 0x08, 0x08, 0x00, 0xC0, 0x80, 0x80, 0x80, 0x7F, 0x00, 0x00, 0x00, // J 42 0x08, 0xF8, 0x88, 0xC0, 0x28, 0x18, 0x08, 0x00, 0x20, 0x3F, 0x20, 0x01, 0x26, 0x38, 0x20, 0x00, // K 43 0x08, 0xF8, 0x08, 0x00, 0x00, 0x00, 0x00, 0x00, 0x20, 0x3F, 0x20, 0x20, 0x20, 0x20, 0x30, 0x00, // L 44 0x08, 0xF8, 0xF8, 0x00, 0xF8, 0xF8, 0x08, 0x00, 0x20, 0x3F, 0x00, 0x3F, 0x00, 0x3F, 0x20, 0x00, // M 45 0x08, 0xF8, 0x30, 0xC0, 0x00, 0x08, 0xF8, 0x08, 0x20, 0x3F, 0x20, 0x00, 0x07, 0x18, 0x3F, 0x00, // N 46 0xE0, 0x10, 0x08, 0x08, 0x08, 0x10, 0xE0, 0x00, 0x0F, 0x10, 0x20, 0x20, 0x20, 0x10, 0x0F, 0x00, // O 47 0x08, 0xF8, 0x08, 0x08, 0x08, 0x08, 0xF0, 0x00, 0x20, 0x3F, 0x21, 0x01, 0x01, 0x01, 0x00, 0x00, // P 48 0xE0, 0x10, 0x08, 0x08, 0x08, 0x10, 0xE0, 0x00, 0x0F, 0x18, 0x24, 0x24, 0x38, 0x50, 0x4F, 0x00, // Q 49 0x08, 0xF8, 0x88, 0x88, 0x88, 0x88, 0x70, 0x00, 0x20, 0x3F, 0x20, 0x00, 0x03, 0x0C, 0x30, 0x20, // R 50 0x00, 0x70, 0x88, 0x08, 0x08, 0x08, 0x38, 0x00, 0x00, 0x38, 0x20, 0x21, 0x21, 0x22, 0x1C, 0x00, // S 51 0x18, 0x08, 0x08, 0xF8, 0x08, 0x08, 0x18, 0x00, 0x00, 0x00, 0x20, 0x3F, 0x20, 0x00, 0x00, 0x00, // T 52 0x08, 0xF8, 0x08, 0x00, 0x00, 0x08, 0xF8, 0x08, 0x00, 0x1F, 0x20, 0x20, 0x20, 0x20, 0x1F, 0x00, // U 53 0x08, 0x78, 0x88, 0x00, 0x00, 0xC8, 0x38, 0x08, 0x00, 0x00, 0x07, 0x38, 0x0E, 0x01, 0x00, 0x00, // V 54 0xF8, 0x08, 0x00, 0xF8, 0x00, 0x08, 0xF8, 0x00, 0x03, 0x3C, 0x07, 0x00, 0x07, 0x3C, 0x03, 0x00, // W 55 0x08, 0x18, 0x68, 0x80, 0x80, 0x68, 0x18, 0x08, 0x20, 0x30, 0x2C, 0x03, 0x03, 0x2C, 0x30, 0x20, // X 56 0x08, 0x38, 0xC8, 0x00, 0xC8, 0x38, 0x08, 0x00, 0x00, 0x00, 0x20, 0x3F, 0x20, 0x00, 0x00, 0x00, // Y 57 0x10, 0x08, 0x08, 0x08, 0xC8, 0x38, 0x08, 0x00, 0x20, 0x38, 0x26, 0x21, 0x20, 0x20, 0x18, 0x00, // Z 58 0x00, 0x00, 0x00, 0xFE, 0x02, 0x02, 0x02, 0x00, 0x00, 0x00, 0x00, 0x7F, 0x40, 0x40, 0x40, 0x00, //[ 59 0x00, 0x0C, 0x30, 0xC0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x01, 0x06, 0x38, 0xC0, 0x00, //\ 60 0x00, 0x02, 0x02, 0x02, 0xFE, 0x00, 0x00, 0x00, 0x00, 0x40, 0x40, 0x40, 0x7F, 0x00, 0x00, 0x00, //] 61 0x00, 0x00, 0x04, 0x02, 0x02, 0x02, 0x04, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, //^ 62 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x80, 0x80, 0x80, 0x80, 0x80, 0x80, 0x80, 0x80, //_ 63 0x00, 0x02, 0x02, 0x04, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, //` 64 0x00, 0x00, 0x80, 0x80, 0x80, 0x80, 0x00, 0x00, 0x00, 0x19, 0x24, 0x22, 0x22, 0x22, 0x3F, 0x20, // a 65 0x08, 0xF8, 0x00, 0x80, 0x80, 0x00, 0x00, 0x00, 0x00, 0x3F, 0x11, 0x20, 0x20, 0x11, 0x0E, 0x00, // b 66 0x00, 0x00, 0x00, 0x80, 0x80, 0x80, 0x00, 0x00, 0x00, 0x0E, 0x11, 0x20, 0x20, 0x20, 0x11, 0x00, // c 67 0x00, 0x00, 0x00, 0x80, 0x80, 0x88, 0xF8, 0x00, 0x00, 0x0E, 0x11, 0x20, 0x20, 0x10, 0x3F, 0x20, // d 68 0x00, 0x00, 0x80, 0x80, 0x80, 0x80, 0x00, 0x00, 0x00, 0x1F, 0x22, 0x22, 0x22, 0x22, 0x13, 0x00, // e 69 0x00, 0x80, 0x80, 0xF0, 0x88, 0x88, 0x88, 0x18, 0x00, 0x20, 0x20, 0x3F, 0x20, 0x20, 0x00, 0x00, // f 70 0x00, 0x00, 0x80, 0x80, 0x80, 0x80, 0x80, 0x00, 0x00, 0x6B, 0x94, 0x94, 0x94, 0x93, 0x60, 0x00, // g 71 0x08, 0xF8, 0x00, 0x80, 0x80, 0x80, 0x00, 0x00, 0x20, 0x3F, 0x21, 0x00, 0x00, 0x20, 0x3F, 0x20, // h 72 0x00, 0x80, 0x98, 0x98, 0x00, 0x00, 0x00, 0x00, 0x00, 0x20, 0x20, 0x3F, 0x20, 0x20, 0x00, 0x00, // i 73 0x00, 0x00, 0x00, 0x80, 0x98, 0x98, 0x00, 0x00, 0x00, 0xC0, 0x80, 0x80, 0x80, 0x7F, 0x00, 0x00, // j 74 0x08, 0xF8, 0x00, 0x00, 0x80, 0x80, 0x80, 0x00, 0x20, 0x3F, 0x24, 0x02, 0x2D, 0x30, 0x20, 0x00, // k 75 0x00, 0x08, 0x08, 0xF8, 0x00, 0x00, 0x00, 0x00, 0x00, 0x20, 0x20, 0x3F, 0x20, 0x20, 0x00, 0x00, // l 76 0x80, 0x80, 0x80, 0x80, 0x80, 0x80, 0x80, 0x00, 0x20, 0x3F, 0x20, 0x00, 0x3F, 0x20, 0x00, 0x3F, // m 77 0x80, 0x80, 0x00, 0x80, 0x80, 0x80, 0x00, 0x00, 0x20, 0x3F, 0x21, 0x00, 0x00, 0x20, 0x3F, 0x20, // n 78 0x00, 0x00, 0x80, 0x80, 0x80, 0x80, 0x00, 0x00, 0x00, 0x1F, 0x20, 0x20, 0x20, 0x20, 0x1F, 0x00, // o 79 0x80, 0x80, 0x00, 0x80, 0x80, 0x00, 0x00, 0x00, 0x80, 0xFF, 0xA1, 0x20, 0x20, 0x11, 0x0E, 0x00, // p 80 0x00, 0x00, 0x00, 0x80, 0x80, 0x80, 0x80, 0x00, 0x00, 0x0E, 0x11, 0x20, 0x20, 0xA0, 0xFF, 0x80, // q 81 0x80, 0x80, 0x80, 0x00, 0x80, 0x80, 0x80, 0x00, 0x20, 0x20, 0x3F, 0x21, 0x20, 0x00, 0x01, 0x00, // r 82 0x00, 0x00, 0x80, 0x80, 0x80, 0x80, 0x80, 0x00, 0x00, 0x33, 0x24, 0x24, 0x24, 0x24, 0x19, 0x00, // s 83 0x00, 0x80, 0x80, 0xE0, 0x80, 0x80, 0x00, 0x00, 0x00, 0x00, 0x00, 0x1F, 0x20, 0x20, 0x00, 0x00, // t 84 0x80, 0x80, 0x00, 0x00, 0x00, 0x80, 0x80, 0x00, 0x00, 0x1F, 0x20, 0x20, 0x20, 0x10, 0x3F, 0x20, // u 85 0x80, 0x80, 0x80, 0x00, 0x00, 0x80, 0x80, 0x80, 0x00, 0x01, 0x0E, 0x30, 0x08, 0x06, 0x01, 0x00, // v 86 0x80, 0x80, 0x00, 0x80, 0x00, 0x80, 0x80, 0x80, 0x0F, 0x30, 0x0C, 0x03, 0x0C, 0x30, 0x0F, 0x00, // w 87 0x00, 0x80, 0x80, 0x00, 0x80, 0x80, 0x80, 0x00, 0x00, 0x20, 0x31, 0x2E, 0x0E, 0x31, 0x20, 0x00, // x 88 0x80, 0x80, 0x80, 0x00, 0x00, 0x80, 0x80, 0x80, 0x80, 0x81, 0x8E, 0x70, 0x18, 0x06, 0x01, 0x00, // y 89 0x00, 0x80, 0x80, 0x80, 0x80, 0x80, 0x80, 0x00, 0x00, 0x21, 0x30, 0x2C, 0x22, 0x21, 0x30, 0x00, // z 90 0x00, 0x00, 0x00, 0x00, 0x80, 0x7C, 0x02, 0x02, 0x00, 0x00, 0x00, 0x00, 0x00, 0x3F, 0x40, 0x40, //{ 91 0x00, 0x00, 0x00, 0x00, 0xFF, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0xFF, 0x00, 0x00, 0x00, //| 92 0x00, 0x02, 0x02, 0x7C, 0x80, 0x00, 0x00, 0x00, 0x00, 0x40, 0x40, 0x3F, 0x00, 0x00, 0x00, 0x00, //} 93 0x00, 0x06, 0x01, 0x01, 0x02, 0x02, 0x04, 0x04, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, //~ 94 }; void OLED_I2C_Delay(unsigned int t) { usleep(t); } void OLED_I2C_Start(void) { gpio_set_direction_outMode(pin_sda); OLED_SDA_HIGH; // 发送起始条件的数据信号 OLED_SCL_HIGH; OLED_I2C_Delay(5); // 起始条件建立时间大于4.7us,延时 OLED_SDA_LOW; // 发送起始信号 OLED_I2C_Delay(5); // 起始条件锁定时间大于4μs OLED_SCL_LOW; // 钳住I2C总线,准备发送或接收数据 OLED_I2C_Delay(5); } void OLED_I2C_Stop(void) { gpio_set_direction_outMode(pin_sda); OLED_SDA_LOW; // 发送结束条件的数据信号 OLED_SCL_LOW; OLED_I2C_Delay(5); OLED_SCL_HIGH; // 发送结束条件的时钟信号 OLED_I2C_Delay(5); // 结束条件建立时间大于4μs OLED_SDA_HIGH; // 发送I2C总线结束信号 OLED_I2C_Delay(5); } unsigned char OLED_I2C_Write_Byte(unsigned char writeByte) { unsigned char i; gpio_set_direction_outMode(pin_sda); OLED_SCL_LOW; OLED_I2C_Delay(5); for (i = 0; i < 8; i++) // 要传送的数据长度为8位 { if (writeByte & 0x80) // 判断发送位 { OLED_SDA_HIGH; } else { OLED_SDA_LOW; } OLED_I2C_Delay(5); OLED_SCL_HIGH; // 输出SDA稳定后,拉高SCL给出上升沿,从机检测到后进行数据采样 OLED_I2C_Delay(5); // 保证时钟高电平周期大于4μs OLED_SCL_LOW; OLED_I2C_Delay(5); writeByte <<= 1; } OLED_I2C_Delay(1); OLED_SDA_HIGH; // 8位发送完后释放数据线,准备接收应答位-ZLG OLED_I2C_Delay(5); OLED_SCL_HIGH; // MCU告知SHT2X数据发送完毕,等待从机的应答信号 OLED_I2C_Delay(5); gpio_set_direction_in(pin_sda); /*以下是判断I2C总线接收应到应答信号是ACK还是NACK*/ if (gpio_get_value(pin_sda) == 1) // SDA为高,收到NACK { OLED_I2C_Delay(5); OLED_SCL_LOW; return NACK; } else // SDA为低,收到ACK { OLED_I2C_Delay(5); OLED_SCL_LOW; return ACK; } } unsigned char OLED_I2C_Read_Byte(unsigned char ackValue) { unsigned char i = 0; unsigned char readByte = 0; gpio_set_direction_outMode(pin_sda); OLED_SCL_LOW; // 置时钟线为低,准备接收数据位 OLED_I2C_Delay(5); OLED_SDA_HIGH; // 释放总线,置数据线为输入方式 gpio_set_direction_in(pin_sda); for (i = 0; i < 8; i++) { OLED_SCL_HIGH; // SCL高电平期间,采集SDA信号,并作为有效数据 //置时钟线为高使数据线上数据有效 OLED_I2C_Delay(5); readByte <<= 1; // 移位 if (gpio_get_value(pin_sda) == 1) // 采样获取数据 { readByte |= 0x01; } else { readByte &= 0xfe; } OLED_I2C_Delay(5); OLED_SCL_LOW; // 下降沿,从机给出下一位值 OLED_I2C_Delay(5); } gpio_set_direction_outMode(pin_sda); /*以下是I2C总线发送应答信号ACK或者NACK*/ gpio_set_direction_out(pin_sda,ackValue); OLED_I2C_Delay(5); OLED_SCL_HIGH; OLED_I2C_Delay(5); // 时钟低电平周期大于4μs OLED_SCL_LOW; // 清时钟线,钳住I2C总线以便继续接收 OLED_I2C_Delay(5); return readByte; } // OLED写入一条指令 void oledWriteCmd(char writeCmd) { OLED_I2C_Start(); OLED_I2C_Write_Byte(0x78); OLED_I2C_Write_Byte(0x00); OLED_I2C_Write_Byte(writeCmd); OLED_I2C_Stop(); } void oledWriteData(char writeData) { OLED_I2C_Start(); OLED_I2C_Write_Byte(0x78); OLED_I2C_Write_Byte(0x40); OLED_I2C_Write_Byte(writeData); OLED_I2C_Stop(); } // 更新显存到LCD void oled_Clear(void) { unsigned char i, n; for (i = 0; i < 8; i++) { oledWriteCmd(0xb0 + i); // 设置页地址(0~7) oledWriteCmd(0x00); // 设置显示位置—列低地址 oledWriteCmd(0x10); // 设置显示位置—列高地址 for (n = 0; n < 130; n++) { oledWriteData(0); } } OLED_I2C_Delay(500000); } // 开启OLED显示 void OLED_Display_On(void) { oledWriteCmd(0X8D); // SET DCDC命令 oledWriteCmd(0X14); // DCDC ON oledWriteCmd(0XAF); // DISPLAY ON } // 关闭OLED显示 void OLED_Display_Off(void) { oledWriteCmd(0XAE); // SET DCDC命令 oledWriteCmd(0X8D); // DCDC OFF oledWriteCmd(0X10); // DISPLAY OFF } // 设置光标 void OLED_Set_Pos(unsigned char x, unsigned char y) { oledWriteCmd(0xB0 + y); oledWriteCmd((x & 0x0f)); oledWriteCmd(((x & 0xf0) >> 4) | 0x10); } // 屏幕初始化函数 void oled_Init(void) { // 导出GPIO引脚 gpio_export(pin_scl); gpio_export(pin_sda); gpio_set_direction_out(pin_scl, HIGH); gpio_set_direction_out(pin_sda, HIGH); oledWriteCmd(0xAE); // 关闭显示 oledWriteCmd(0x00); // 设置时钟分频因子,震荡频率 oledWriteCmd(0x10); //[3:0],分频因子;[7:4],震荡频率 oledWriteCmd(0x40); // 设置驱动路数 oledWriteCmd(0xB0); // 默认0X3F(1/64) oledWriteCmd(0x81); // 默认为0 oledWriteCmd(0xFF); // 设置显示开始行 [5:0],行数. oledWriteCmd(0xA1); // 电荷泵设置 oledWriteCmd(0xA6); // bit2,开启/关闭 oledWriteCmd(0xA8); // 设置内存地址模式 oledWriteCmd(0x3F); //[1:0],00,列地址模式;01,行地址模式;10,页地址模式;默认10; oledWriteCmd(0xC8); // 段重定义设置,bit0:0,0->0;1,0->127; oledWriteCmd(0xD3); // 设置COM扫描方向;bit3:0,普通模式;1,重定义模式 COM[N-1]->COM0;N:驱动路数 oledWriteCmd(0x00); // 设置COM硬件引脚配置 oledWriteCmd(0xD5); //[5:4]配置 oledWriteCmd(0x80); // 对比度设置 oledWriteCmd(0xD9); // 1~255;默认0X7F (亮度设置,越大越亮) oledWriteCmd(0xF1); // 设置预充电周期 oledWriteCmd(0xDA); //[3:0],PHASE 1;[7:4],PHASE 2; oledWriteCmd(0x12); // 设置VCOMH 电压倍率 oledWriteCmd(0xDB); //[6:4] 000,0.65*vcc;001,0.77*vcc;011,0.83*vcc oledWriteCmd(0x40); // 全局显示开启;bit0:1,开启;0,关闭;(白屏/黑屏) oledWriteCmd(0x8D); // 设置显示方式;bit0:1,反相显示;0,正常显示 oledWriteCmd(0x14); // 开启显示 oledWriteCmd(0xAF); // 开启显示 OLED_Clear(); OLED_Set_Pos(0, 0); oled_Clear(); } void oled_DeInit(void) { gpio_unexport(pin_scl); gpio_unexport(pin_sda); } // 在指定位置显示一个字符,包括部分字符 // x:0~127 // y:0~63 // mode:0,反白显示;1,正常显示 // size:选择字体 16/12 void OLED_ShowChar(unsigned char x, unsigned char y, unsigned char chr) { unsigned char c = 0, i = 0; c = chr - ' '; if (x > Max_Column) { x = 0; y = y + 2; } if (SIZE == 16) // ×Ö·û´óСÈç¹ûΪ16 =8 *16 { OLED_Set_Pos(x, y); // ´Óx,y¿ªÊ¼»µã for (i = 0; i < 8; i++) { oledWriteData(F8X16[c * 16 + i]); } OLED_Set_Pos(x, y + 1); // ´Óx,y¿ªÊ¼»µã for (i = 0; i < 8; i++) { oledWriteData(F8X16[c * 16 + i + 8]); } } else // 6 =6*8 { OLED_Set_Pos(x, y); for (i = 0; i < 6; i++) oledWriteData(F6x8[c][i]); } } // 显示字符串 // x,y:起点坐标 // size:字体大小 //*p:字符串起始地址 void oled_ShowString(unsigned char x, unsigned char y, const unsigned char *chr) { unsigned char j = 0; while (chr[j] != '\0') { OLED_ShowChar(x, y, chr[j]); x += 8; if (x >= 128) { x = 0; y += 2; } j++; } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
- 190
- 191
- 192
- 193
- 194
- 195
- 196
- 197
- 198
- 199
- 200
- 201
- 202
- 203
- 204
- 205
- 206
- 207
- 208
- 209
- 210
- 211
- 212
- 213
- 214
- 215
- 216
- 217
- 218
- 219
- 220
- 221
- 222
- 223
- 224
- 225
- 226
- 227
- 228
- 229
- 230
- 231
- 232
- 233
- 234
- 235
- 236
- 237
- 238
- 239
- 240
- 241
- 242
- 243
- 244
- 245
- 246
- 247
- 248
- 249
- 250
- 251
- 252
- 253
- 254
- 255
- 256
- 257
- 258
- 259
- 260
- 261
- 262
- 263
- 264
- 265
- 266
- 267
- 268
- 269
- 270
- 271
- 272
- 273
- 274
- 275
- 276
- 277
- 278
- 279
- 280
- 281
- 282
- 283
- 284
- 285
- 286
- 287
- 288
- 289
- 290
- 291
- 292
- 293
- 294
- 295
- 296
- 297
- 298
- 299
- 300
- 301
- 302
- 303
- 304
- 305
- 306
- 307
- 308
- 309
- 310
- 311
- 312
- 313
- 314
- 315
- 316
- 317
- 318
- 319
- 320
- 321
- 322
- 323
- 324
- 325
- 326
- 327
- 328
- 329
- 330
- 331
- 332
- 333
- 334
- 335
- 336
- 337
- 338
- 339
- 340
- 341
- 342
- 343
- 344
- 345
- 346
- 347
- 348
- 349
- 350
- 351
- 352
- 353
- 354
- 355
- 356
- 357
- 358
- 359
- 360
- 361
- 362
- 363
- 364
- 365
- 366
- 367
- 368
- 369
- 370
- 371
- 372
- 373
- 374
- 375
- 376
- 377
- 378
- 379
- 380
- 381
- 382
- 383
- 384
- 385
- 386
- 387
- 388
- 389
- 390
- 391
- 392
- 393
- 394
- 395
- 396
- 397
- 398
- 399
- 400
- 401
- 402
- 403
- 404
- 405
- 406
- 407
- 408
- 409
- 410
- 411
- 412
- 413
- 414
- 415
- 416
- 417
- 418
- 419
- 420
- 421
- 422
- 423
- 424
- 425
- 426
- 427
- 428
- 429
- 430
- 431
- 432
- 433
- 434
- 435
- 436
- 437
- 438
- 439
- 440
- 441
- 442
- 443
- 444
- 445
- 446
- 447
- 448
- 449
- 450
- 451
- 452
- 453
- 454
- 455
- 456
- 457
- 458
- 459
- 460
- 461
- 462
- 463
- 464
- 465
- 466
- 467
- 468
- 469
- 470
- 471
- 472
- 473
- 474
- 475
- 476
- 477
- 478
- 479
- 480
- 481
- 482
- 483
- 484
- 485
server.c和server.h
server.h
#ifndef SERVER_H
#define SERVER_H
#define MAX_MATCHES 10 // 正则表达式匹配次数
#define IP_REGEX "([0-9]{1,3}\\.){3}[0-9]{1,3}" // 正则表达式,匹配xxx.xxx.xxx.xxx
#define BUF_SIZE 128 // readBuffer和writeBuffer的大小
#define SERVER_PORT "8006"
void *server_pthread(void *arg);
#endif /* SERVER_H */
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
server.c
#include "mainPro.h" int server_Fd = 0; char IP_ADDRESS[24] = {'\0'}; void get_ip_address() { // 调用终端执行ifconfig命令 char tmpBuf[1024] = {'\0'}; FILE *fp = popen("ifconfig wlan0", "r"); int readCnt = fread(tmpBuf, 1, 1024, fp); pclose(fp); regex_t regex; // 正则表达式结构体,用来存储编译后的正则表达式 regmatch_t matches[MAX_MATCHES]; // 匹配结果数组,用来存储匹配到的结果 int ret; ret = regcomp(®ex, IP_REGEX, REG_EXTENDED); // 编译正则表达式,REG_EXTENDED使用扩展正则表达式模式 if (ret != 0) { fprintf(stderr, "Failed to compile regex\n"); return; } ret = regexec(®ex, tmpBuf, MAX_MATCHES, matches, 0); // 目标字符串匹配正则表达式,MAX_MATCHES为匹配的最大次数 if (ret != 0) { fprintf(stderr, "No IP address found\n"); regfree(®ex); return; } char *ip_address = malloc(16); if (ip_address == NULL) { fprintf(stderr, "Failed to allocate memory\n"); regfree(®ex); // 释放编译的正则表达式结构体 return; } memset(ip_address, '\0', 16); int len = matches[0].rm_eo - matches[0].rm_so; strncpy(ip_address, tmpBuf + matches[0].rm_so, len); // Free the regex regfree(®ex); // 释放编译的正则表达式结构体 // oled_Clear(); // oled_ShowString(0 + 2, 0, ip_address); // 第一行 // oled_ShowString(0 + 2, 6, SERVER_PORT); // 最后一行 memset(IP_ADDRESS,0,24); strncpy(IP_ADDRESS,ip_address,16); } void *server_SendData_pthread(void *arg) { int connectFd = *((int *)arg); char writeBuf[BUF_SIZE] = "Hello Orange KunPengPro"; while (1) { write(connectFd, writeBuf, strlen(writeBuf)); usleep(3000000); // 延时1000ms } return NULL; } void *server_clientConnect_pthread(void *arg) { int connectFd = *((int *)arg); char readBuf[BUF_SIZE]; int readSize; pthread_t server_SendData_tid; if (pthread_create(&server_SendData_tid, NULL, server_SendData_pthread, arg) != 0) { perror("pthread_create"); } while (1) { memset(readBuf, '\0', sizeof(readBuf)); readSize = read(connectFd, readBuf, sizeof(readBuf)); if (readSize < 0) { perror("read"); break; } else if (readSize == 0) { printf("Client disconnected\n"); break; } else { printf("Message from client: %s\n", readBuf); } } pthread_cancel(server_SendData_tid); close(connectFd); free(arg); return NULL; } int serverInit() { get_ip_address(); server_Fd = socket(AF_INET, SOCK_STREAM, 0); if (server_Fd < 0) { perror("socket"); return -1; } struct sockaddr_in my_net; memset(&my_net, 0, sizeof(struct sockaddr_in)); my_net.sin_family = AF_INET; my_net.sin_port = htons(atoi(SERVER_PORT)); inet_aton(IP_ADDRESS, &my_net.sin_addr); if (bind(server_Fd, (struct sockaddr *)&my_net, sizeof(struct sockaddr_in)) < 0) { perror("bind"); return -1; } if (listen(server_Fd, 15) < 0) { perror("listen"); return -1; } return 0; } void *server_pthread(void *arg) { int connectFd = 0; struct sockaddr_in msg_addr; int tmp = 0; int size = sizeof(struct sockaddr_in); serverInit(); printf("OrangeKunPengPro_IP:%s,OrangeKunPengPro_Port:%s\n", IP_ADDRESS, SERVER_PORT); oled_ShowString(0, 0, IP_ADDRESS); oled_ShowString(0, 6, SERVER_PORT); while (1) { memset(&msg_addr, 0, sizeof(struct sockaddr_in)); connectFd = accept(server_Fd, (struct sockaddr *)&msg_addr, &size); if (connectFd < 0) { perror("accept"); } tmp++; printf("Got connection %d from %s\n", tmp, inet_ntoa(msg_addr.sin_addr)); int *connectFd_ptr = (int *)malloc(sizeof(int)); *connectFd_ptr = connectFd; pthread_t server_clientConnect_tid; if (pthread_create(&server_clientConnect_tid, NULL, server_clientConnect_pthread, connectFd_ptr) != 0) { perror("pthread_create"); free(connectFd_ptr); } pthread_detach(server_clientConnect_tid); } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
mainPro.c和mainPro.h
mainPro.h
#ifndef MAINPRO_H #define MAINPRO_H #include <stdio.h> #include <stdlib.h> #include <unistd.h> #include <fcntl.h> #include <string.h> #include <sys/types.h> #include <sys/socket.h> #include <netinet/in.h> #include <arpa/inet.h> #include <pthread.h> #include <regex.h> #include "gpio_control.h" #include "oled.h" #include "server.h" #endif /* MAINPRO_H */
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
mainPro.c
#include "mainPro.h" int main(int argc, char *argv[]) { system("sudo /home/openEuler/GPIO_CONTROL/clear"); oled_Init(); pthread_t server_tid; if (pthread_create(&server_tid, NULL, server_pthread, NULL) != 0) { perror("pthread_create"); } pthread_join(server_tid, NULL); oled_ShowString(0,0,"jiangxiaoya"); oled_DeInit(); return 0; }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
与QT上位机的交互
因为架设了Socket服务端,因此,我们可以通过网络调试助手或者QT上位机来与香橙派KunpengPro进行网络通信。

创建一个开机自启动服务
创建一个开机自启动服务,该服务连上网后才会执行。

创建一个自启动服务文件
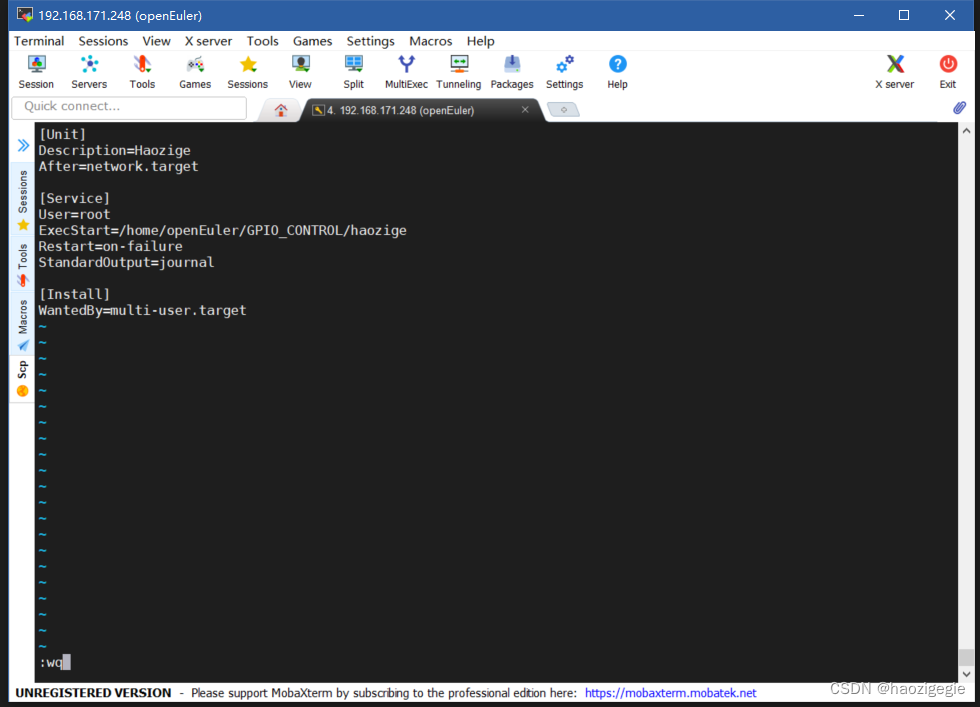
sudo vi /etc/systemd/system/haozige.service,haozige是文件名,可以自行修改,内容填下面的,记得使用root权限,如果有报错,把中文注释删掉。
[Unit]
Description=Haozige #这里是这个服务的描述,可以不用管
After=network.target #连上网才启动服务
[Service]
User=root #用户名
ExecStart=/home/openEuler/GPIO_CONTROL/haozige #可执行文件的路径,就是你gcc编译出来的可执行文件
Restart=on-failure #服务失败后选择重启操作
StandardOutput=journal #服务的标准输出流,选择日志,可以用journalctl -u haozige.service -e命令查看
[Install]
WantedBy=multi-user.target
重新加载 systemd 配置并启用服务
sudo systemctl daemon-reload
sudo systemctl restart haozige.service

查看服务是否成功开启
sudo systemctl status haozige.service,这里发现服务开启失败了。

重新启动服务,并查看服务状态
sudo systemctl start haozige.service,重新启动服务,sudo systemctl status haozige.service重新查看服务状态。

此时已经成功开启服务了,我们可以使用sudo reboot命令重启香橙派KunpengPro开发板,查看开机显示IP效果。
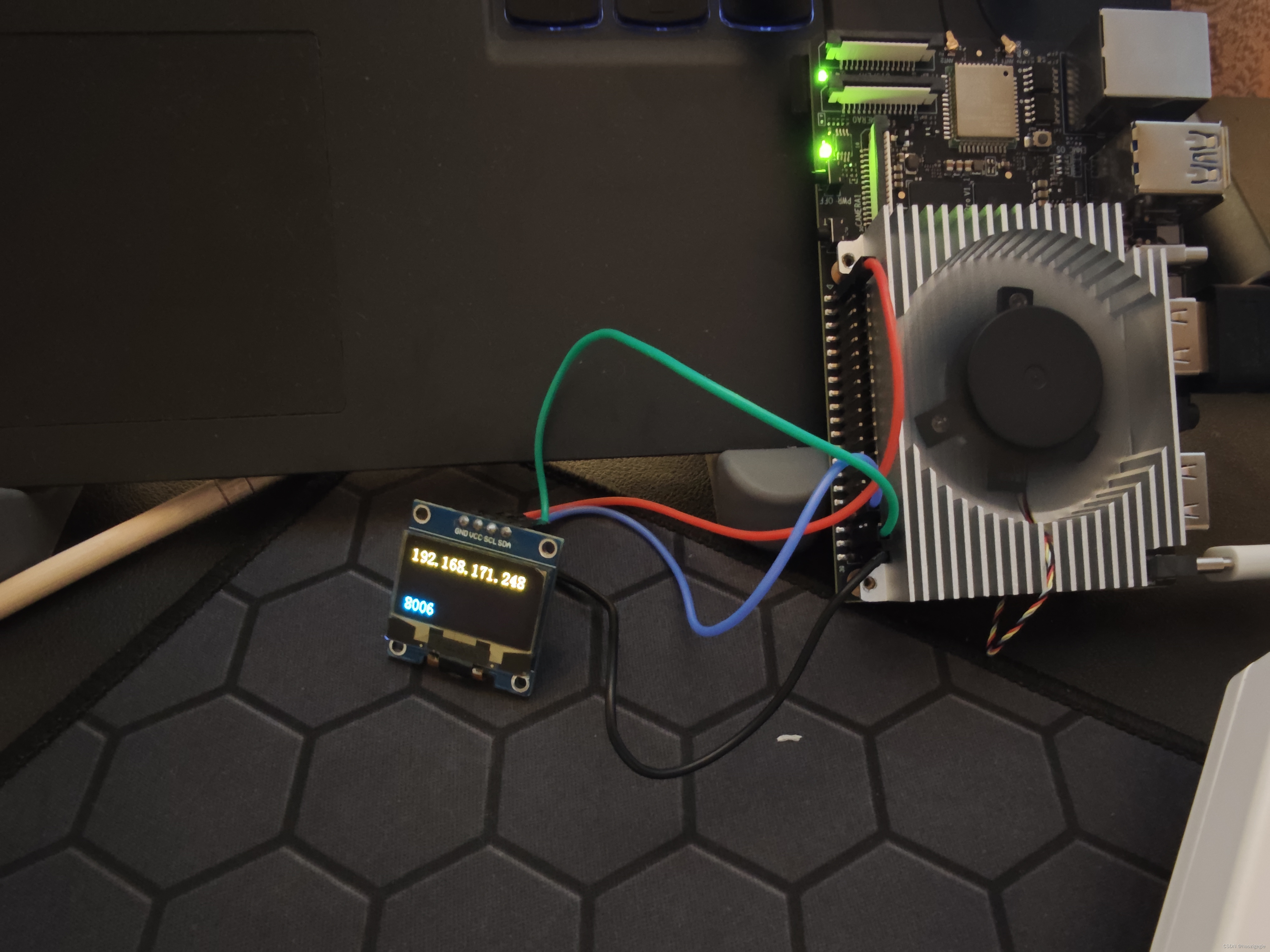
体验总结
作为一名即将毕业的嵌入式爱好者,最近有幸参与了香橙派KunpengPro开发板的亲身体验,香橙派KunpengPro最吸引我的地方在于它那颗强大的“心脏”——4核64位处理器+AI处理器,搭配上8GB或16GB的大内存,运行速度快得起飞,即便是同时运行多个编程环境或者开发工具也不在话下。而且,它那AI处理能力,8TOPS的算力也算得上是性能怪兽。无论是图像识别的小实验,还是语音助手的复杂demo,都能轻松驾驭。
我平时的主要研究方向就是水下智能机器人、智能家居、智能鸡舍、智能小车等智能系统,期间用的开发板在OpenCV的折磨下,都发烫的厉害,从而造成系统卡顿以及程序因温度过高而崩溃,香橙派KunpengPro搭配了良好的散热套装,在这几天的体验下来,明显感觉到香橙派KunpengPro在程序运行期间的流畅性,而且板子温度也不高,以后有机会可以用来开发出各种各样的智能系统。
总的来说,香橙派KunpengPro就像是我数字生活里的瑞士军刀,功能多样又实用,无论是日常的学习探索,还是突发的创新灵感,它都能完美匹配,让我的技术之旅更加多彩多姿。

