
热门标签
热门文章
- 1Redis 键(key)
- 2用Python写3D游戏,太赞了_python 3d 游戏 directx
- 3git 分支相关常用命令_git 相关分支命令
- 4HarmonyOS实战开发-如何在聊天信息中加入表情图片。_鸿蒙开发 表情与键盘
- 5国内互联网大厂的薪资、职级、绩效考核是怎样的?
- 6Point Transformer 论文阅读笔记
- 7【2024最新华为OD-C/D卷试题汇总】[支持在线评测] LYA的登山之旅01(100分)- 三语言AC题解(Python/Java/Cpp)
- 8java会被rust替代吗_Rust 未来会成为主流的编程语言吗?
- 9【鸿蒙 HarmonyOS 快速入门·第一课】 HiSpark Wi-Fi IoT 套件基础入门_润和harmonyos鸿蒙开发板
- 10Spring Boot中的跨域请求处理_springboot 跨域 预检请求
当前位置: article > 正文
【江科大】STM32:(超级详细)定时器输出比较_stm32输出比较控制脱机
作者:酷酷是懒虫 | 2024-07-06 00:12:16
赞
踩
stm32输出比较控制脱机
输出比较单元
- 名词解释
IC input capture 输入捕获
OC outpucompare 输出比较
CC capture compare 输入捕获和输出比较的单元
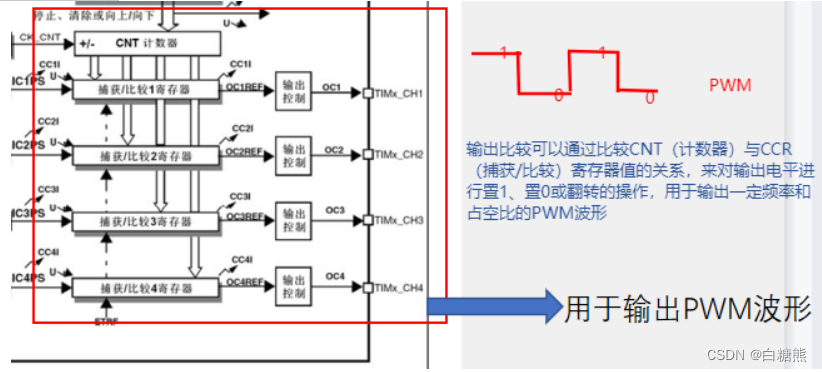
OC(Output Compare)输出比较 :用来输出PWM波形
特点
-
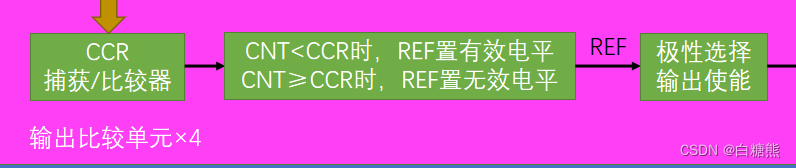
输出比较可以通过比较CNT(计数器)与CCR(捕获/比较)寄存器值的关系,来对输出电平进行置1、置0或翻转的操作,用于输出一定频率和占空比的PWM波形。
-
每个高级定时器和通用定时器都拥有4个输出比较通道
-
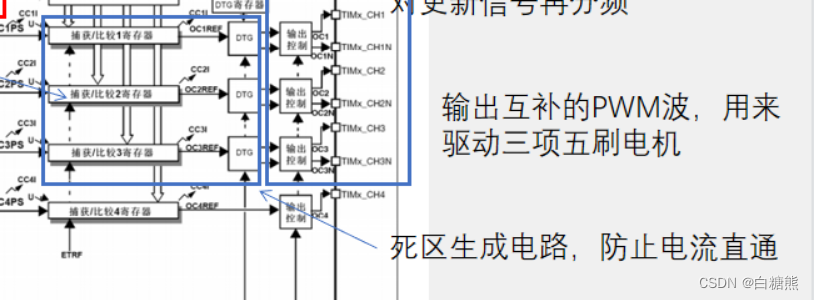
高级定时器的前3个通道额外拥有死区生成和互补输出的功能(用于驱动三相无刷电机)
通用定时器:均有4个通道
高级定时器:均有4个通道
PWM简介
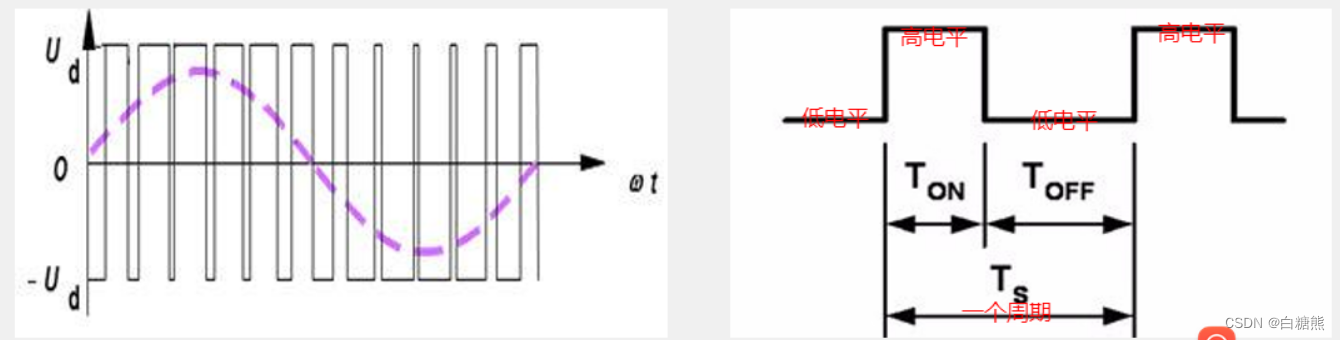
PWM(Pulse Width Modulation)脉冲宽度调制
- 必须是在具有惯性的系统中,可以通过对一系列脉冲的宽度进行调制,来等效地获得所需要的模拟参量,常应用于电机控速等领域
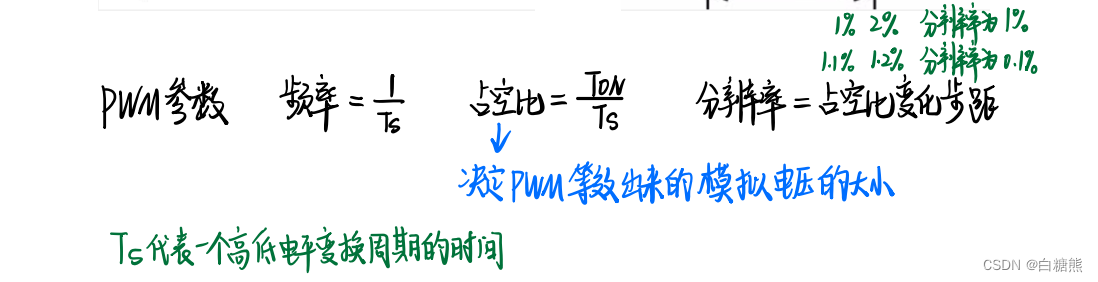
PWM参数:
频率 = 1 / TS
占空比 = TON / TS
分辨率 = 占空比变化步距
(PWM的频率在几千到几十KHZ就已经很快了)(分辨率 表示占空比的精细程度)
- TON:高电平的时间
- TS:一个周期的时间
(频率 = 1 / TS 可以看出周期越大,那么频率就越小,就越平稳。
占空比 = TON / TS)
TON/TS:高电平相对整个周期的比例
如果TON = 20% 那么低电平就是80%,占空比越大,等效的模拟电压就越接近于高电平。
(PWM调光,通过高频点亮熄灭,点亮熄灭来实现对灯光强弱的控制,只要闪的够快就发现不了是正常的还是没有的)
原因:LED熄灭时,由于人眼的余辉和视觉暂留现象,LED不会立刻熄灭,过一小段才会熄灭,电机也是因为惯性过一会才会停下来
输出比较通道
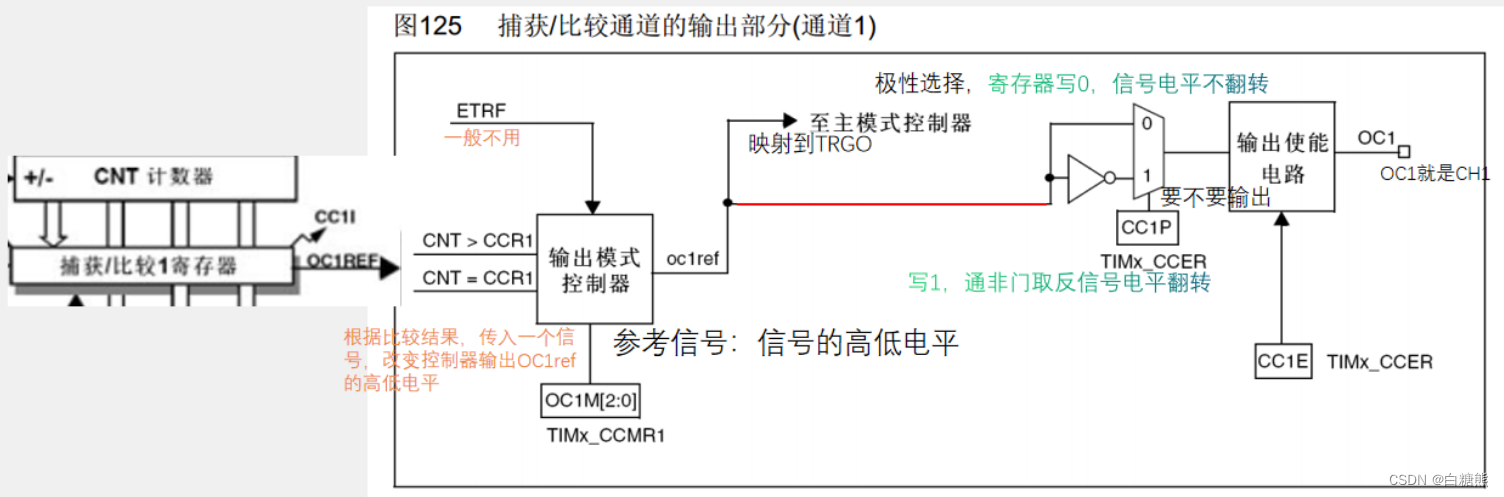
极性选择:就是选择要不要把高低电平反转一下

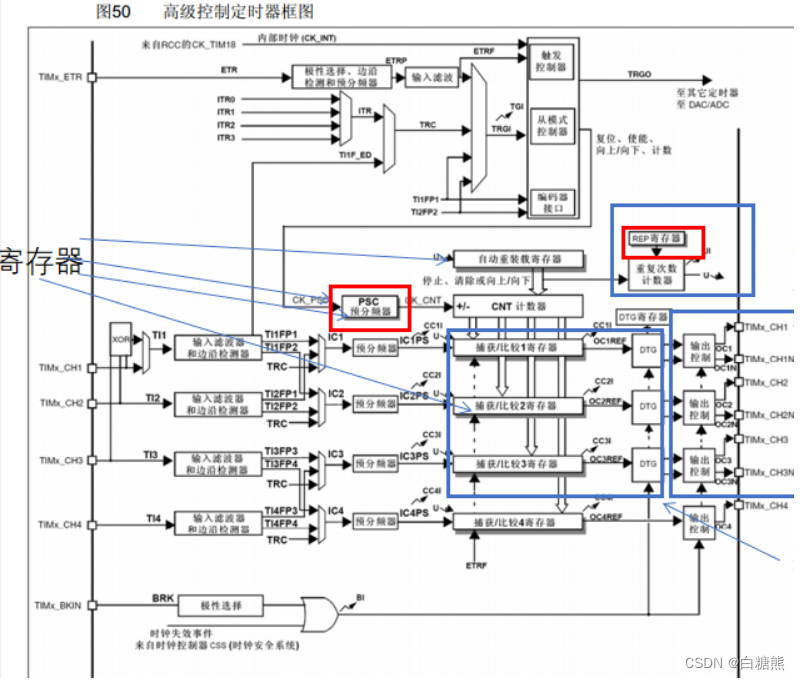
PWM基本结构
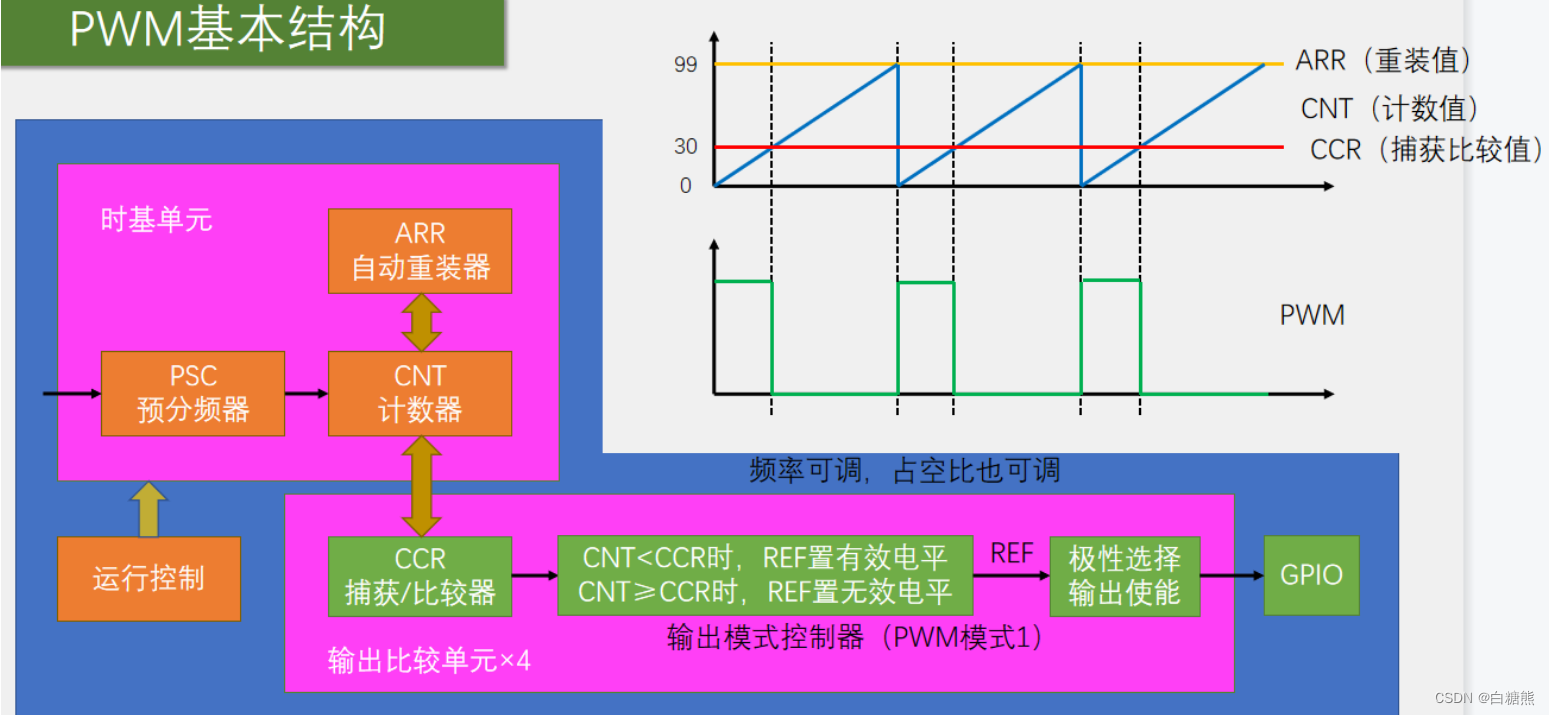
占空比和CCR值有关
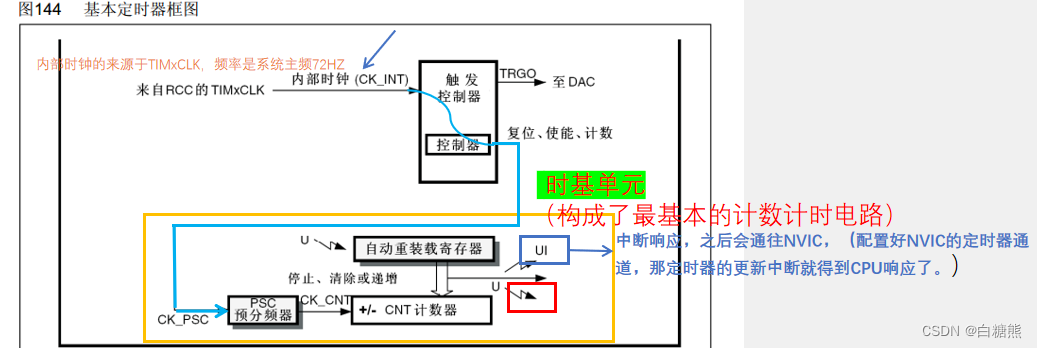
基本定时器
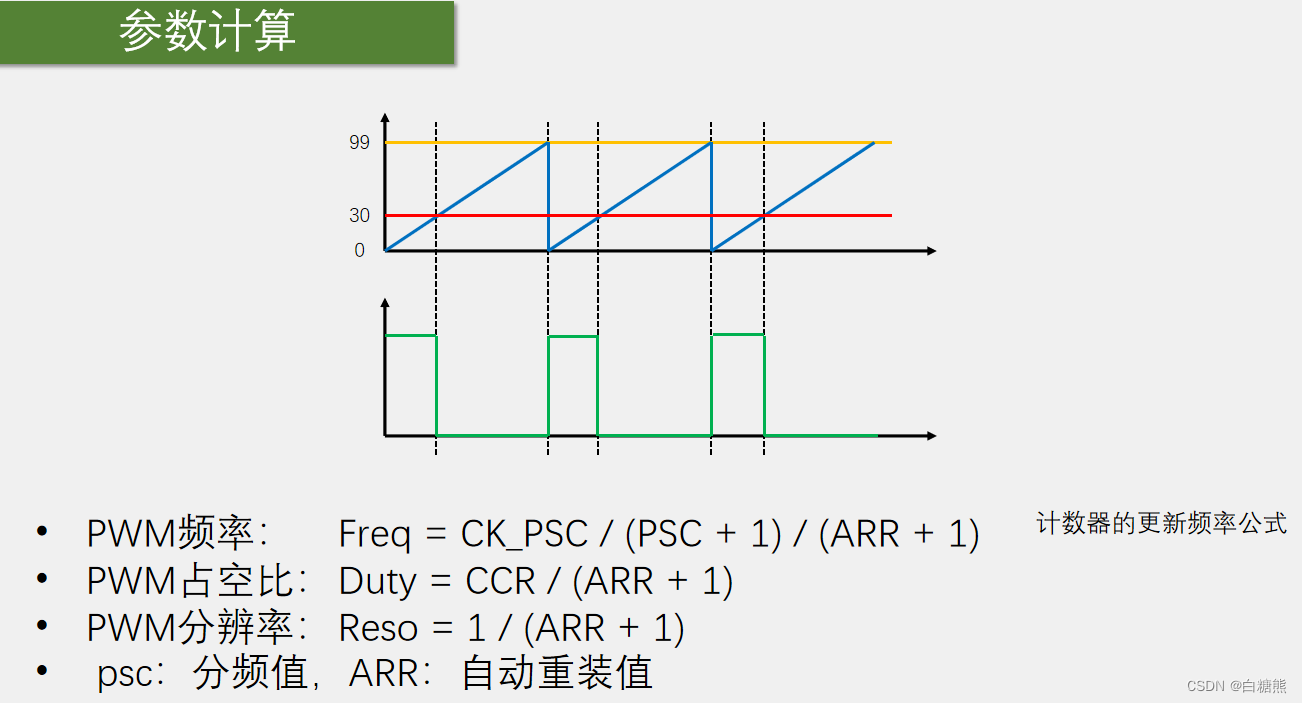
参数计算
- PWM输出的通道口时CH1

- 根据引脚定义表,得出GPIO口时PA0

- 输出模式选用复用推挽输出,原因是采用定时器来进行输出控制
- CCR的值
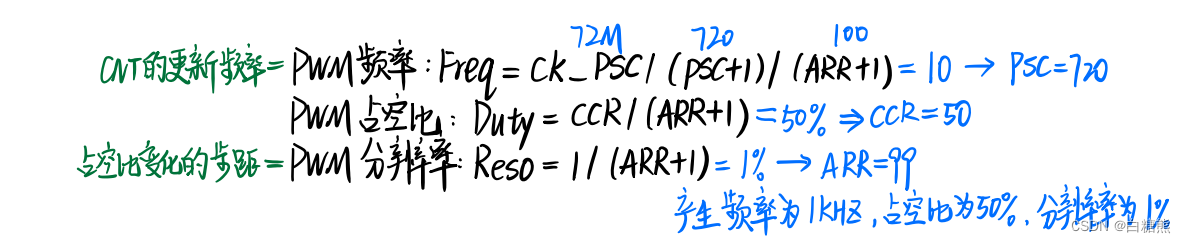
根据PWM频率
Freq = CK_PSC / (PSC + 1) / (ARR + 1) :
72MHZ/(PSC+1)/(ARR+1) = 1000
PSC+1 =72000000/1000000=720HZ
PWM占空比:
Duty = CCR / (ARR + 1) CCR/(ARR+1) = 50% --》 CCR = 50
PWM分辨率:
Reso = 1 / (ARR + 1) 1/(ARR+1) = 1% --》ARR+1 = 100
分辨率是自己给的
捕获/比较通道的输出部分
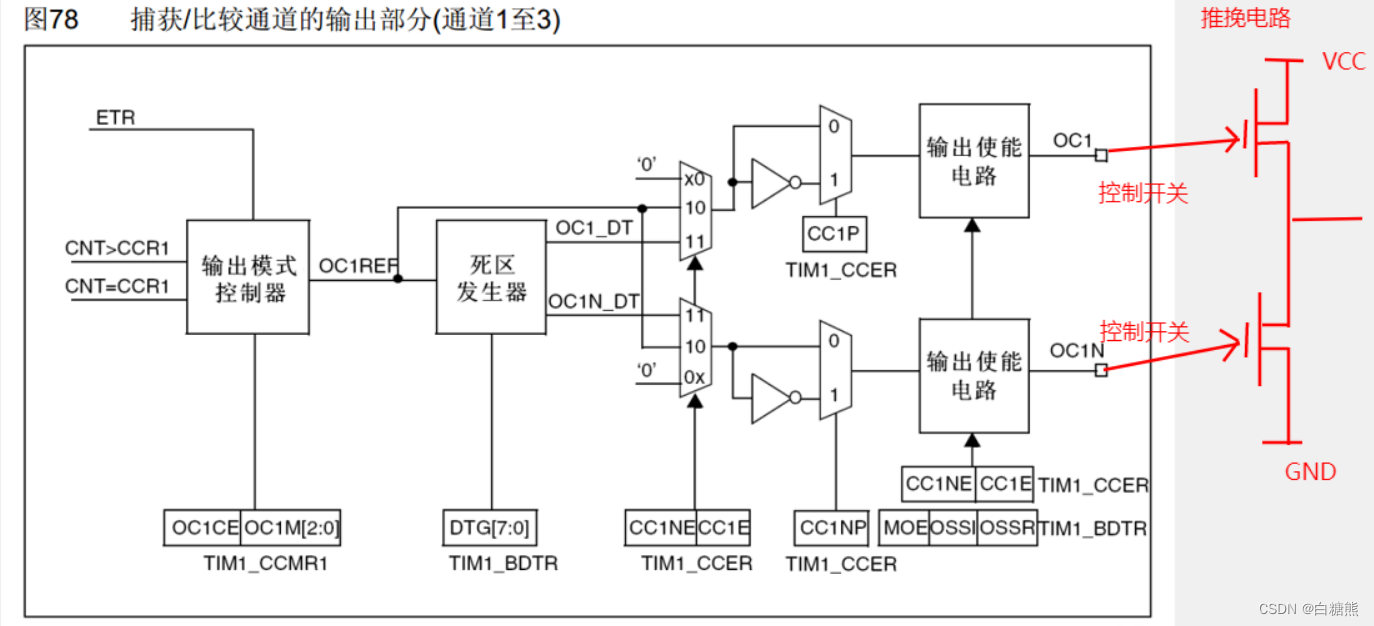
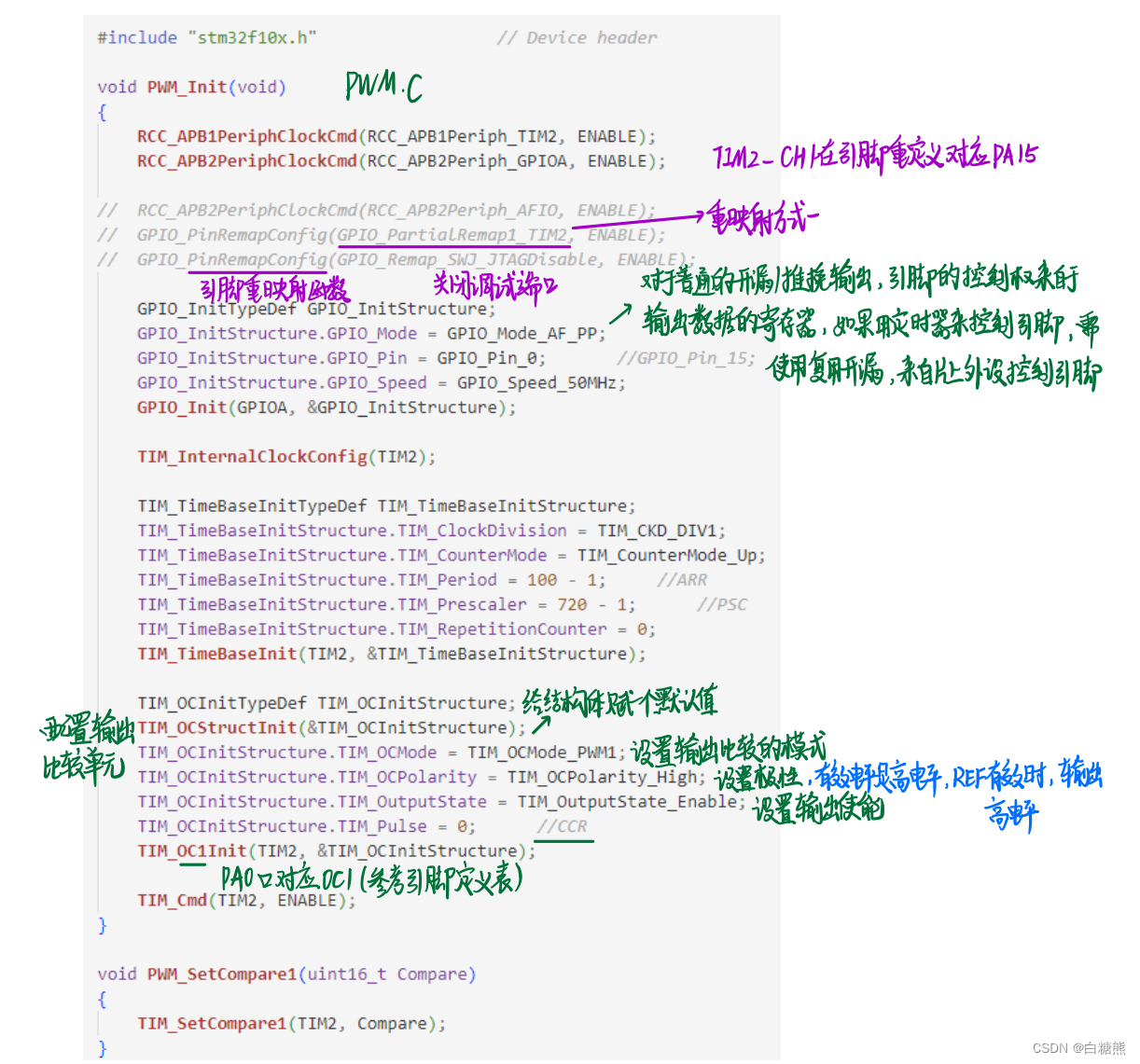
对于普通的推挽输出:引脚的控制权来自于输出数据寄存器,来进行输出控制
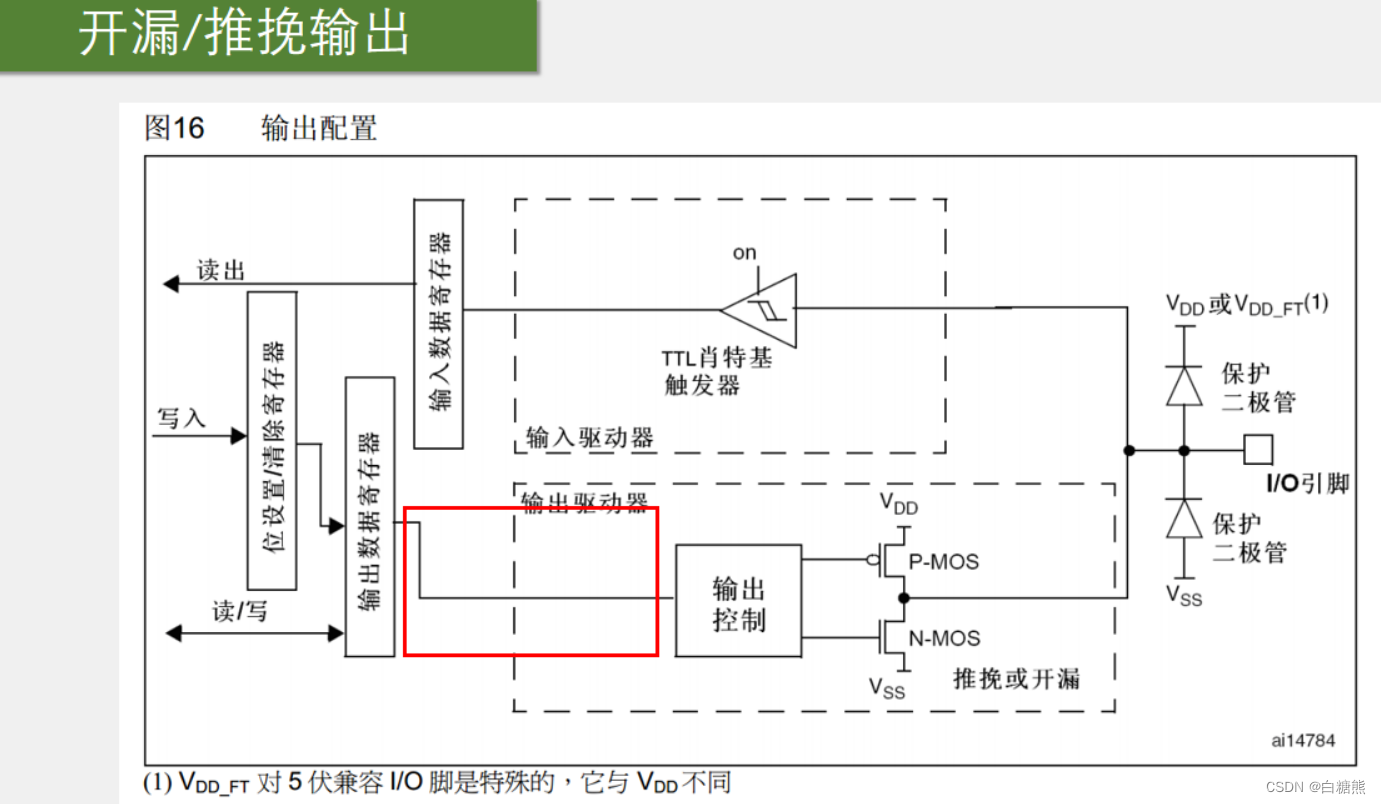
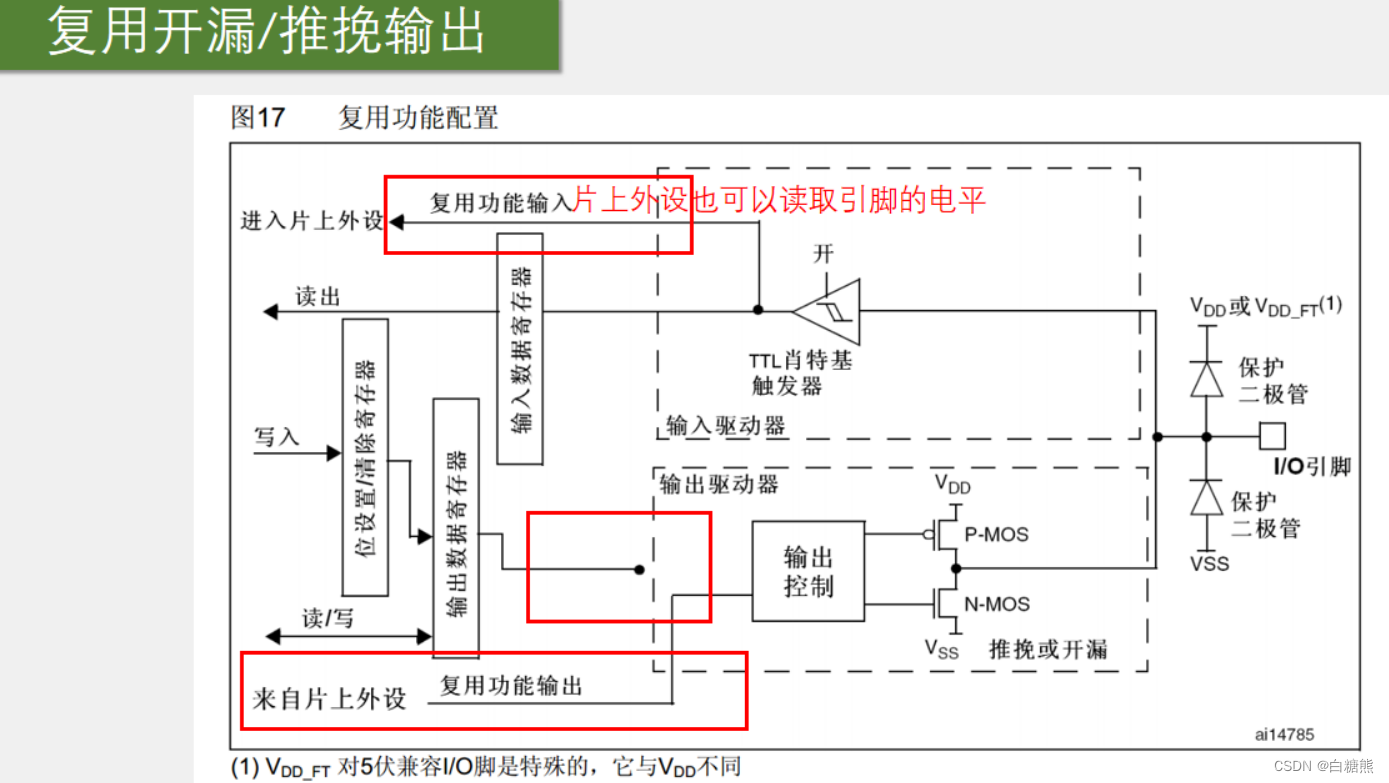
而想要定时器来控制引脚就需要使用复用开漏推挽输出。(定时器属于片上外设)
- 重复次数计数器:
实现每隔几个周期再更新一次。之前是,每个周期都更新,对更新信号再分频 - DTG:死区生成电路,防止电流直通
- RK刹车输入功能:给电机驱动提供安全保证。如内部时钟失效,控制电路会自动切断电路
- AFIO:端口重映射
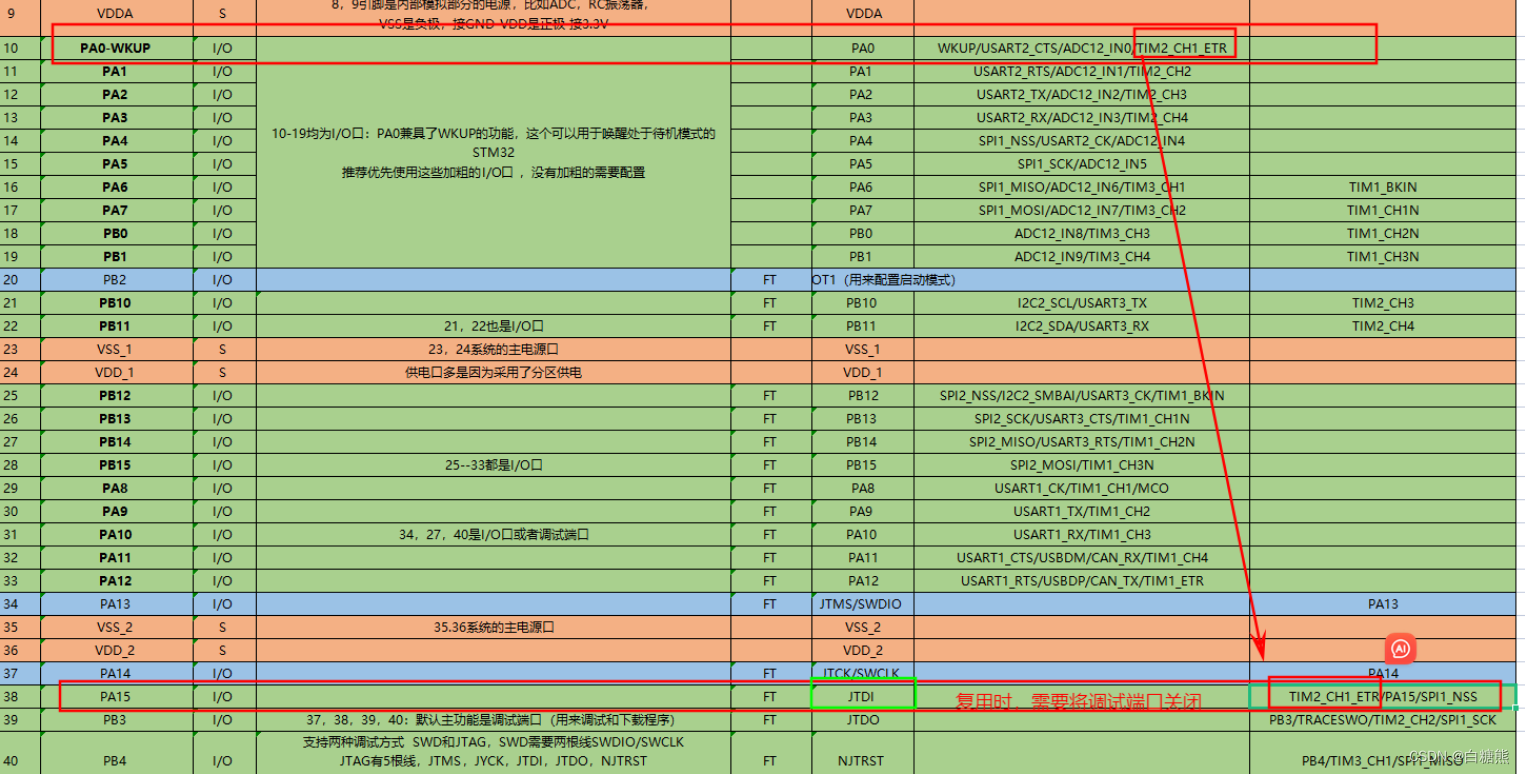
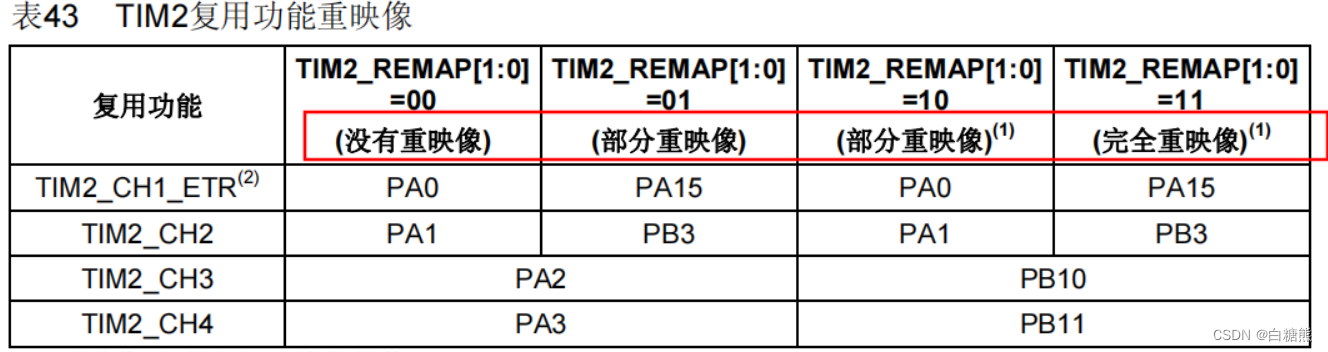
如果要重定义某个端口:
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);//给AFIO使能
GPIO_PinRemapConfig(GPIO_PartialRemap1_TIM2,ENABLE); //重映射 把CH1的PA0换到PA15
GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable ,ENABLE);//关闭PA15的调试端口的功能
- 1
- 2
- 3

详细介绍如下:
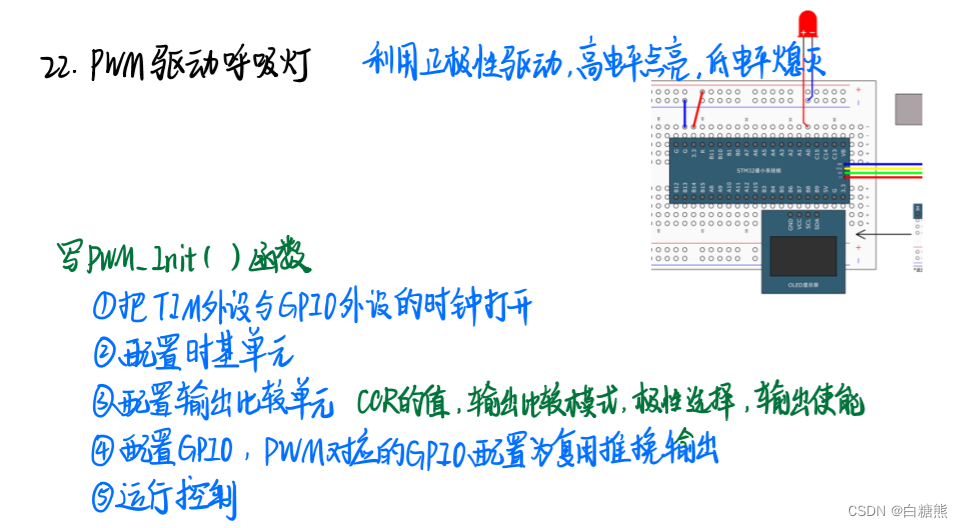
- RCC 把GPIO,TIM外设的时钟打开
- 配置时基单元
- 配置输出比较单元,时钟源选择
- 配置输出比较单元,CCR的值,输出比较模式,极性选择,输出使能
- 配置GPIO ,配置为复用推免
- 运行控制,启动计数器
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);//给TIM2使能 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);//给GPIO使能 GPIO_InitTypeDef GPIO_InitStruct; GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP; //由于定时器属于片上外设,所以采用复用推挽输出, GPIO_InitStruct.GPIO_Pin = GPIO_Pin_0; //根据引脚表的出CH_1所在引脚时PA0 GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA,&GPIO_InitStruct); TIM_InternalClockConfig(TIM2); //选择内部时钟 给时基单元提供时钟 //时基单元 TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct; TIM_TimeBaseInitStruct.TIM_ClockDivision = TIM_CKD_DIV1; //每一个时钟后面都会加一个滤波器, //作用就是为是信号更加稳定,使用的采样的方式, //在输入的脉冲中采样,按照n/f,因此采样系数越大,延迟越大 TIM_TimeBaseInitStruct.TIM_CounterMode = TIM_CounterMode_Up; //计数方式,递增 TIM_TimeBaseInitStruct.TIM_Period = 100-1; //ARR =100 TIM_TimeBaseInitStruct.TIM_Prescaler = 720-1; // psc = 720 //预分频器,72MHZ进行7200分频 , //72000/7200 = 10KHZ 1ms = 1KHZ //10KHZ下记10000个数 10000/10000HZ = 1S // f = 1/t TIM_TimeBaseInitStruct.TIM_RepetitionCounter = 0; //重复计数器(高级定时器才有) TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStruct); //配置比较输出模块 TIM_OCInitTypeDef TIM_OCInitStruct; TIM_OCStructInit(&TIM_OCInitStruct);//给结构体赋初始值 TIM_OCInitStruct.TIM_OCMode = TIM_OCMode_PWM1;//输出比较模式 //TIM_OCInitStruct.TIM_OCNIdleState = ; //带N的都是高级定时器才用的 //TIM_OCInitStruct.TIM_OCNPolarity = ; TIM_OCInitStruct.TIM_OCPolarity = TIM_OCPolarity_High; //输出比较极性 //TIM_OCInitStruct.TIM_OutputNState = ; TIM_OCInitStruct.TIM_OutputState = TIM_OutputState_Enable; //使能输出状态 TIM_OCInitStruct.TIM_Pulse = 50;//CCR的值 TIM_OC1Init(TIM2,&TIM_OCInitStruct); //运行控制,所有的模块配置完毕,启动时基单元 TIM_Cmd(TIM2,ENABLE); //如果要使用高级定时器,就需要把TIM2改为TIM1,那么结构原来用不到的成员。就需要用到,这些成员又没有赋值, //这个时候就会出现奇怪的问题,如果把初始化函数放在的程序第一行没有问题,初始化函数前面出现了其他的代码,那么4路PWM就会有3路不能输出。这竟然和初始化函数在那一行有关。 //原因是,没有给结构体配置完整,也没有给结构体赋初始值。所以要用到structInit()函数,给结构体赋初始值。

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
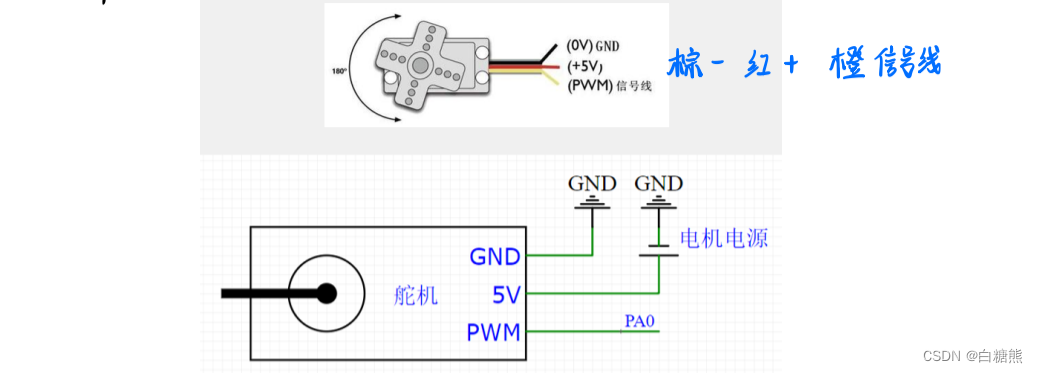
舵机介绍
舵机是一种根据输入PWM信号占空比来控制输出角度的装置
输入PWM(可当作一种输出协议)信号要求:周期为20ms,高电平宽度为0.5ms~2.5ms


- PWM输入到控制板,给控制板一个指定的目标角度,然后这个电位器检测当前的输出角度,如果大于目标角度,电机就会反转
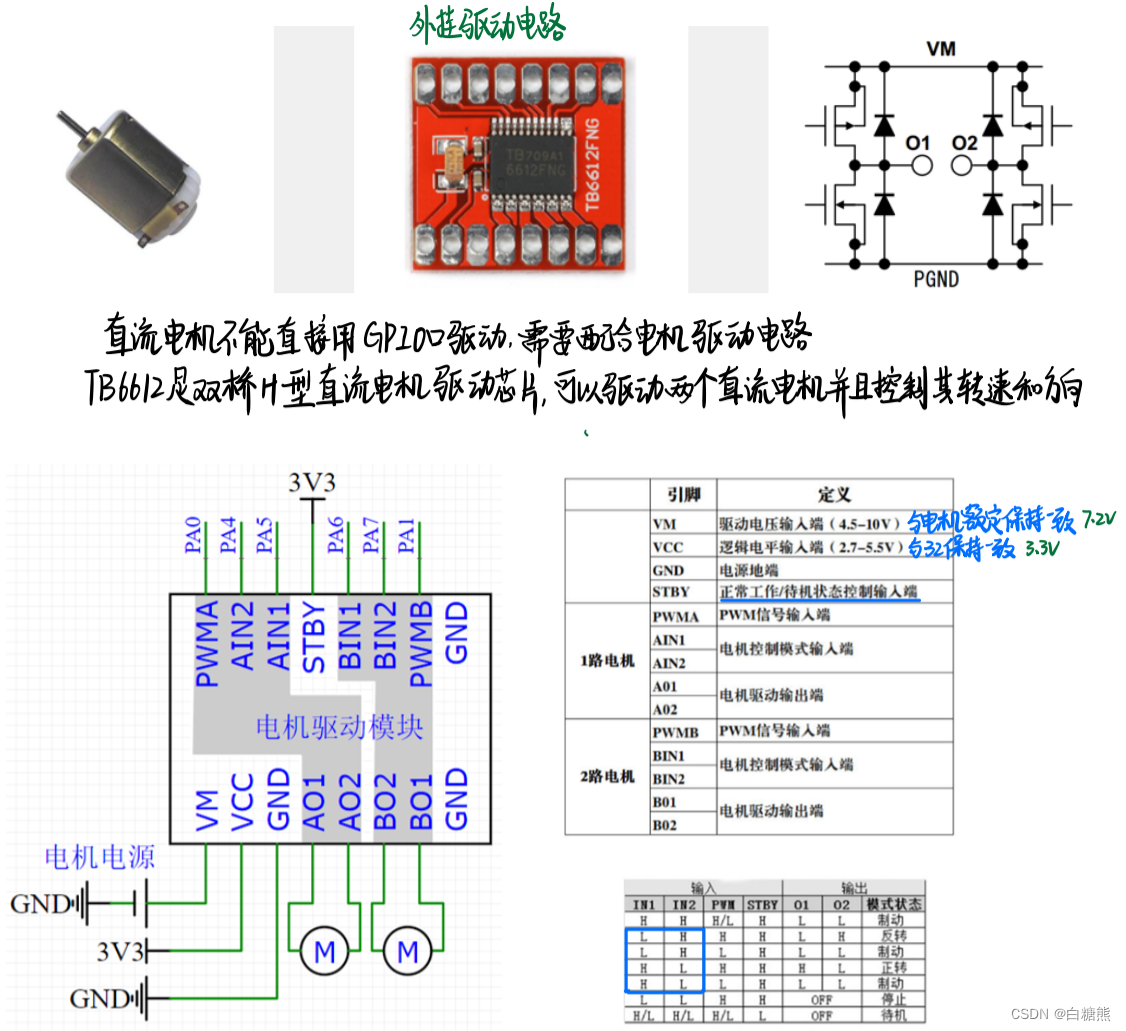
硬件电路
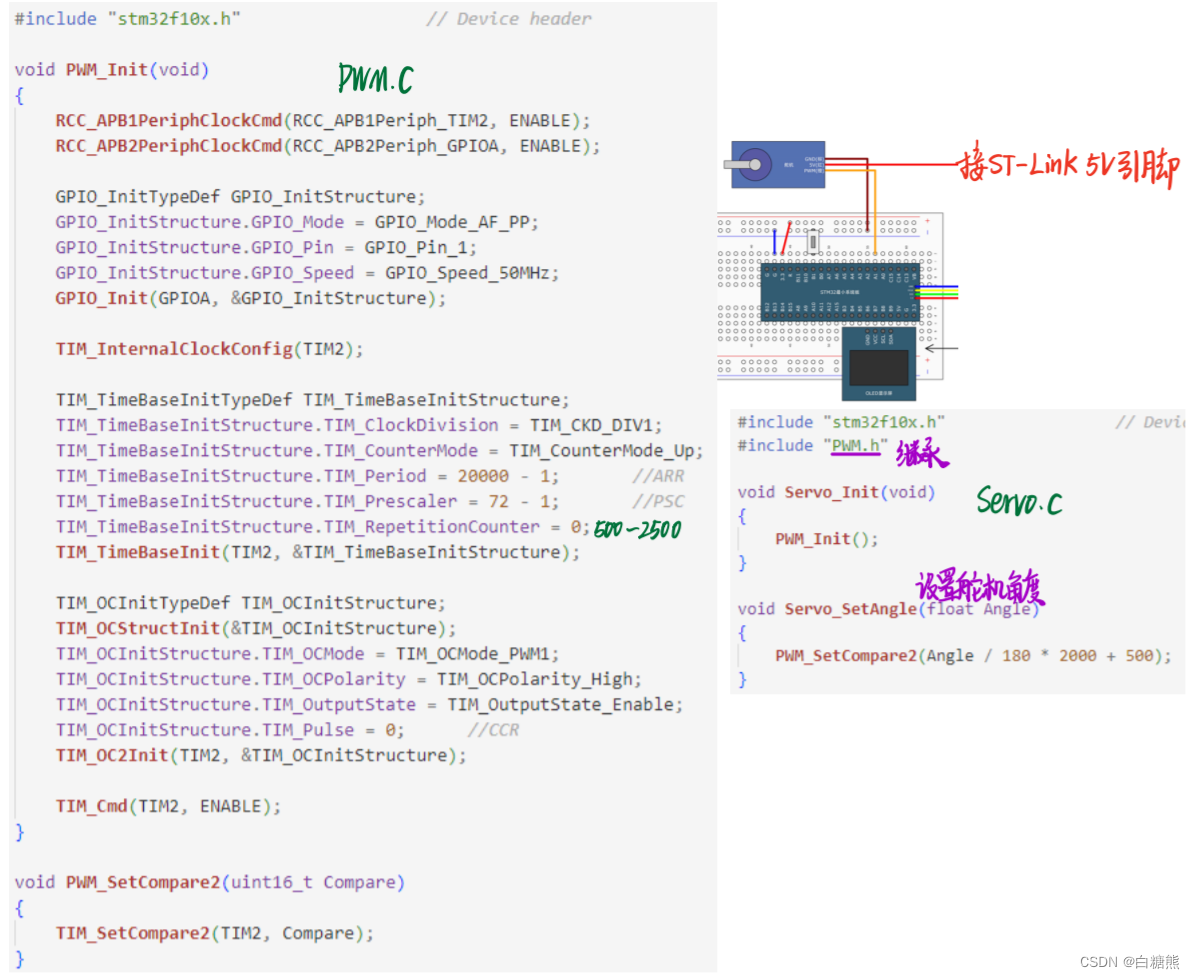
void Servo_Init(void)
{
PWM_Init();
}
void Servo_SetAngle(float Angle)
{
//0 500
//180 2500 度数
PWM_SetCompare2(Angle / 180 * 2000 + 500);
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
PWM驱动舵机
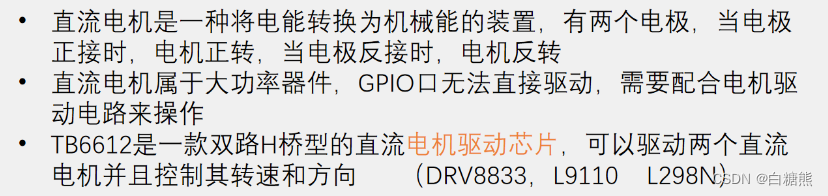
直流电机介绍:
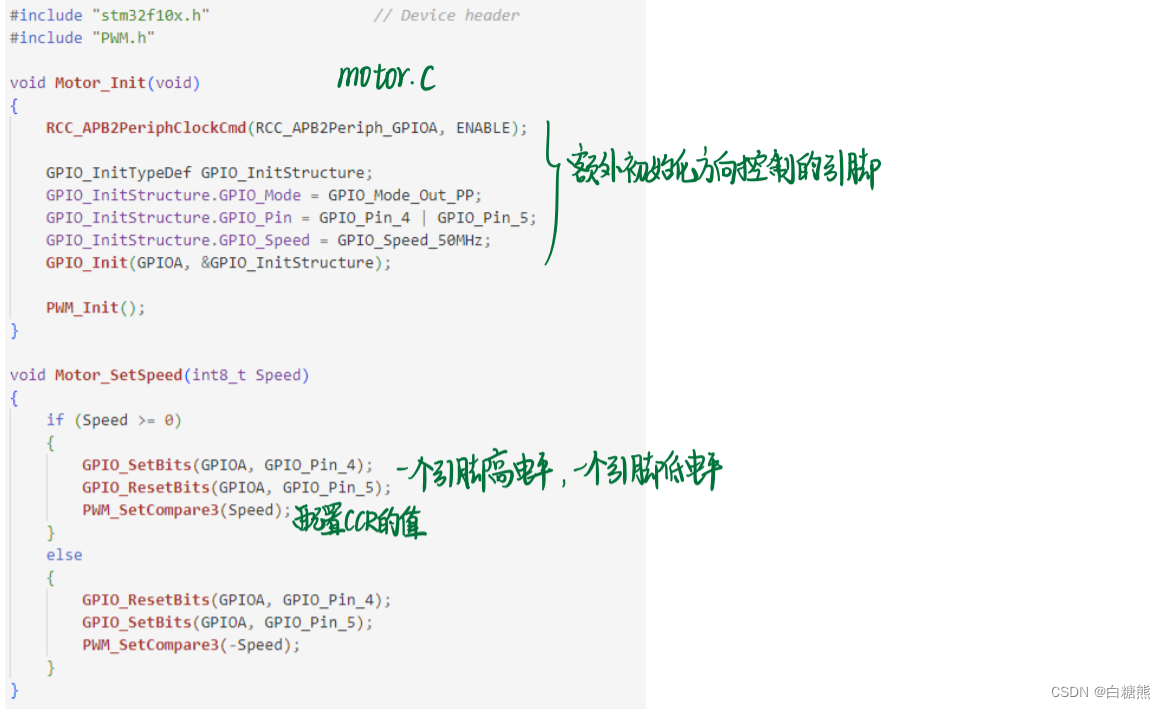
直流电机驱动代码
1.RCC使能GPIO
2.选择时钟,给定时器单元使能
3.配置时基单元(也就是计数模块)
4.配置输出比较模块
5.启动时基单元
6.逻辑函数
选用的是通用定时器TIM2,
由于直流电机上的PWMA连接的是PA2口,根据引脚定义表。PA2对应的时钟通道是TIM2_CH3.
所以在选择输出比较通道时,选择初始化3通道。TIM_OC3Init(TIM2,&TIM_OCInitStruct);
void Motor_Init(void) { RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE); GPIO_InitTypeDef GPIO_InitStruct; GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出模式,高低电平均可以亮 GPIO_InitStruct.GPIO_Pin = GPIO_Pin_4|GPIO_Pin_5; //方向控制角 GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA,&GPIO_InitStruct); PWM_Init(); } void Motor_SetSpeed(uint8_t speed) { if(speed >= 0) { GPIO_SetBits(GPIOA,GPIO_Pin_4); //给端口4给高 5给低 正转 GPIO_ResetBits(GPIOA,GPIO_Pin_5); PWM_SetCompare3(speed); //给PWM设置CCR的值 捕获比较值,根据不同CCR的值,得到PWM波也不同,输出的速度自然不同 } else { GPIO_ResetBits(GPIOA,GPIO_Pin_4); //给端口4给低 5给高 反转 GPIO_SetBits(GPIOA,GPIO_Pin_5); PWM_SetCompare3(-speed); } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28

输出比较(库函数)
//配置输出比较单元
void TIM_OC1Init(TIM_TypeDef* TIMx, TIM_OCInitTypeDef* TIM_OCInitStruct);
void TIM_OC2Init(TIM_TypeDef* TIMx, TIM_OCInitTypeDef* TIM_OCInitStruct);
void TIM_OC3Init(TIM_TypeDef* TIMx, TIM_OCInitTypeDef* TIM_OCInitStruct);
void TIM_OC4Init(TIM_TypeDef* TIMx, TIM_OCInitTypeDef* TIM_OCInitStruct);
void TIM_OCStructInit(TIM_OCInitTypeDef* TIM_OCInitStruct);
//配置强制输出模式
//如果暂停输出波形并且强制输出高/低电平,强制设置高电平,和设置100%占空比是一样的
void TIM_ForcedOC1Config(TIM_TypeDef* TIMx, uint16_t TIM_ForcedAction);
void TIM_ForcedOC2Config(TIM_TypeDef* TIMx, uint16_t TIM_ForcedAction);
void TIM_ForcedOC3Config(TIM_TypeDef* TIMx, uint16_t TIM_ForcedAction);
void TIM_ForcedOC4Config(TIM_TypeDef* TIMx, uint16_t TIM_ForcedAction);
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
//用来单独设置输出比较的极性,带N的就是高级定时器,互补通道的配置,OC4没有互补通道,所以没有OC4N的函数。 void TIM_OC1PolarityConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPolarity); void TIM_OC1NPolarityConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCNPolarity); void TIM_OC2PolarityConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPolarity); void TIM_OC2NPolarityConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCNPolarity); void TIM_OC3PolarityConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPolarity); void TIM_OC3NPolarityConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCNPolarity); void TIM_OC4PolarityConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPolarity); //用来单独修改输出使能函数 void TIM_CCxCmd(TIM_TypeDef* TIMx, uint16_t TIM_Channel, uint16_t TIM_CCx); void TIM_CCxNCmd(TIM_TypeDef* TIMx, uint16_t TIM_Channel, uint16_t TIM_CCxN); //单独修改选择输出比较模式 void TIM_SelectOCxM(TIM_TypeDef* TIMx, uint16_t TIM_Channel, uint16_t TIM_OCMode); //用来单独修改CCR寄存器值的函数 ,更改占空比 (掌握) void TIM_SetCompare1(TIM_TypeDef* TIMx, uint16_t Compare1); void TIM_SetCompare2(TIM_TypeDef* TIMx, uint16_t Compare2); void TIM_SetCompare3(TIM_TypeDef* TIMx, uint16_t Compare3); void TIM_SetCompare4(TIM_TypeDef* TIMx, uint16_t Compare4);
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
//这个函数仅再高级定时器使用!!!!!!,在使用高级定时器输出PWM时,需要调用这个函数使能主输出,否则PWM将不再正常输出
void TIM_CtrlPWMOutputs(TIM_TypeDef* TIMx, FunctionalState NewState);
- 1
- 2
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/酷酷是懒虫/article/detail/791341
推荐阅读
相关标签

