
- 1Android Studio gradle下载失败_gradle-8.0-bin.zip 下载失败
- 2ONLYOFFICE 8.1 版本桌面编辑器测评
- 3开源项目:机遇与挑战共存的创新之路
- 4YOLOv10改进 | 主干/Backbone篇 | 轻量级网络ShuffleNetV1(附代码+修改教程)
- 5百度安全X盈科全球数据合规服务中心:推进数据安全及合规智能化创新领域深化合作
- 6Win10下配置CUDA8.0+Tensorflow1.3+Python3.6_cuda 8.0安装tensorflow1.3.0
- 7MongoDB 安装和数据导入导出问题_mongodb compass如何 export data
- 8Google的guava缓存学习使用_谷歌guava缓存
- 9HBase HMaster启动和停止
- 10Flutter和React Native(RN)的比较
QP状态机学习②——QM的使用_qm状态机
赞
踩
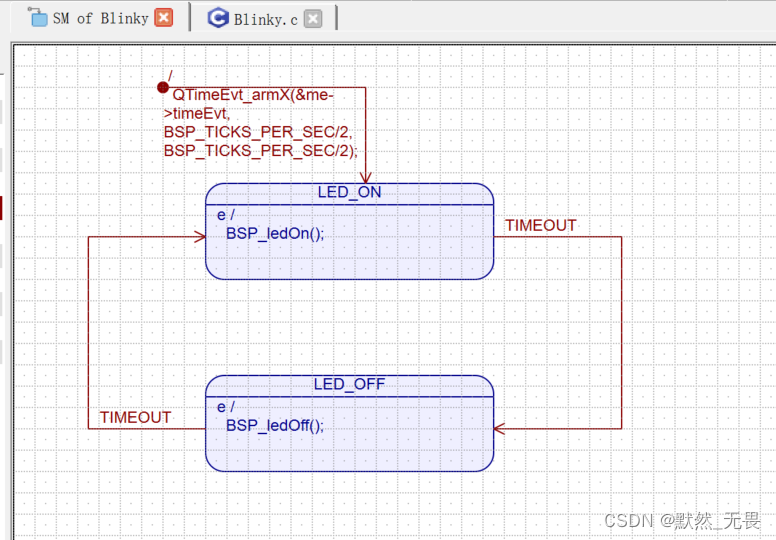
QM的使用主要是生成UML的状态机图
例子的主要功能是每隔0.5s闪烁LED
具体的使用流程参考的是 状态机 | 如何从零开始构建一个QM项目 (qq.com)
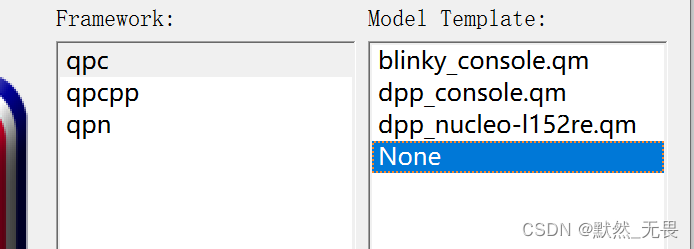
在左上角找到新建模型的选项
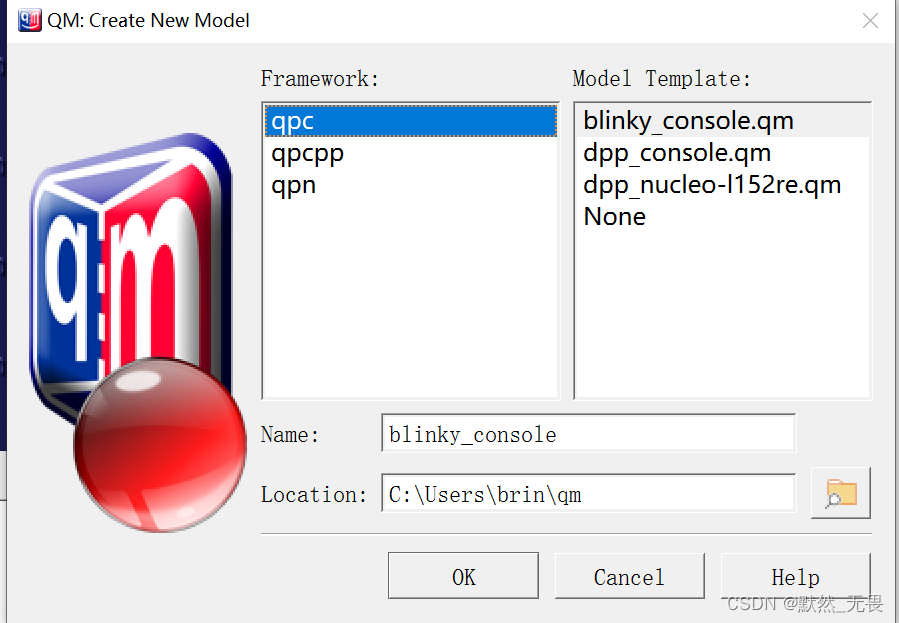
我们可以看到有3种框架,qpc,qpcpp和qpn.其中qpcpp是C++的部分基本和我们用不上,之后qpn这个是qpc nano的意思,但是现在这个已经不用了,没有更新了。所以我们采用qpc。详情可以参见Quantum Leaps · GitHub

我们新建一个类似于官方闪灯的空白模型,然后生成到对应目录,选择qpc -> None
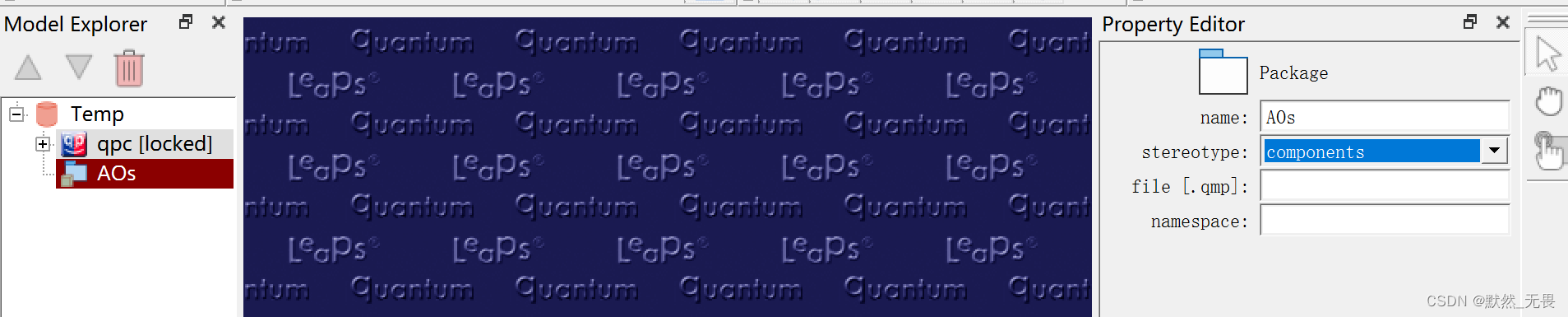
添加的第一项是包,UML中的包是一种分组构造,它允许我们将其他模型项组合到更高级别的单元(包)中。程序包最常见的用途是将类分组在一起,但是程序包也可以包含自由属性,自由操作甚至其他程序包。
在Model Explorer视图中,右键单击模型项目以获取特定于该项目的弹出菜单,然后选择Add Package,在Property Editor视图中更改名字如下图:
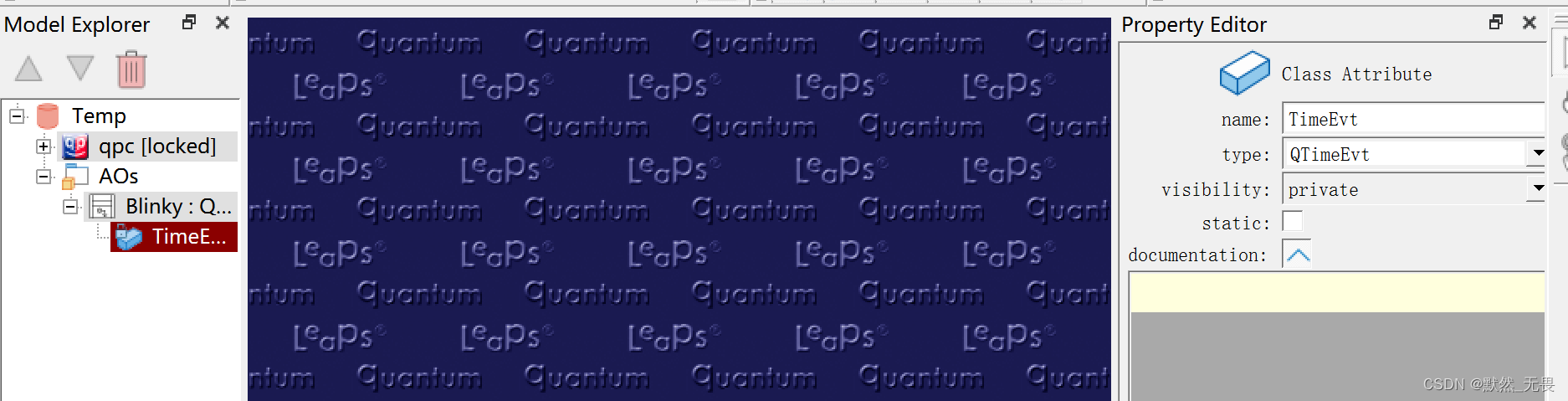
接下来,向新包中添加一个类,因为只有类才能具有行为(即状态机)。
在Model Explorer视图中,右键单击AOs以获取特定于该项目的弹出菜单,然后选择Add Class,在Property Editor视图中更改名字如下图:
 接下来添加时间事件属性,该属性将周期性触发“Blinky”状态机中的闪烁。
接下来添加时间事件属性,该属性将周期性触发“Blinky”状态机中的闪烁。
在Model Explorer视图中,右键单击Blinky:QActive以获取特定于该项目的弹出菜单,然后选择Add Attribute,在Property Editor视图中更改配置如下图:
添加状态机
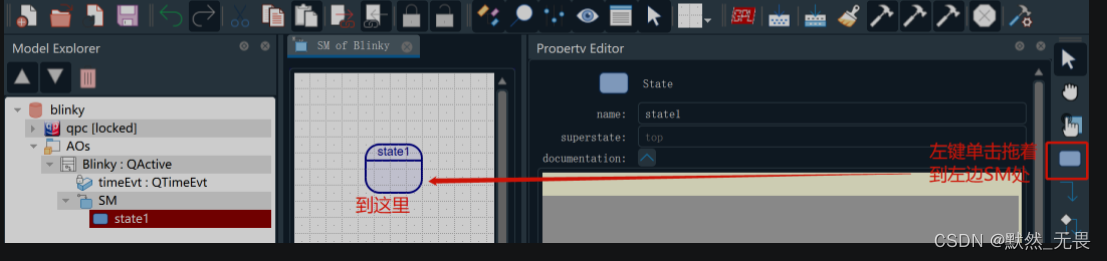
在Model Explorer视图中,右键单击Blinky:QActive以获取特定于该项目的弹出菜单,然后选择Add State Machine,双击SM,如下图: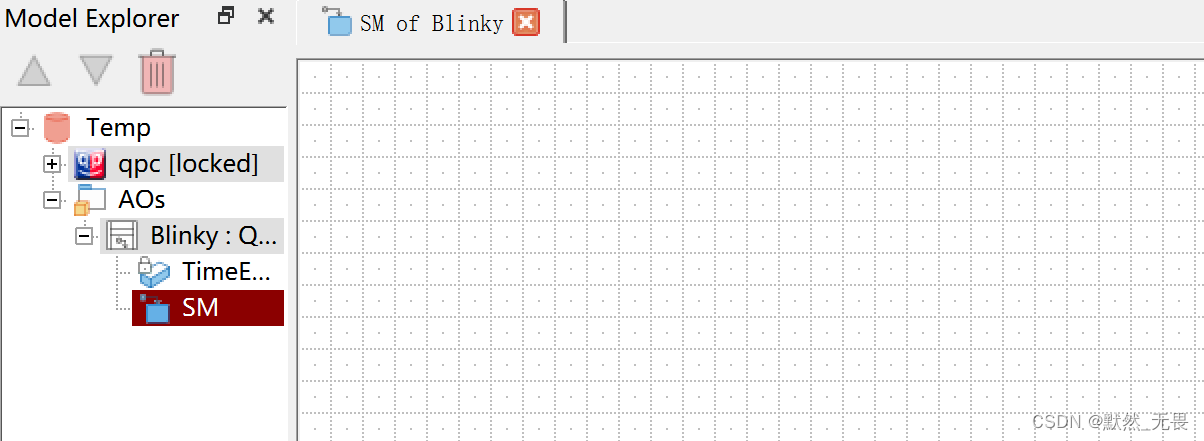
添加状态
在图工具箱中,单击状态工具,将鼠标移动到图表窗口,在其中放置状态形状的左上角。单击鼠标并将其拖动到状态形状的右下角,释放鼠标。举个例子如下:
在Property Editor中,将状态名称更改为off,然后将entry添加到此状态BSP_ledOff();,添加第二个状态就变为on、BSP_ledOn()。
再添加起始的默认状态,也就是起点。
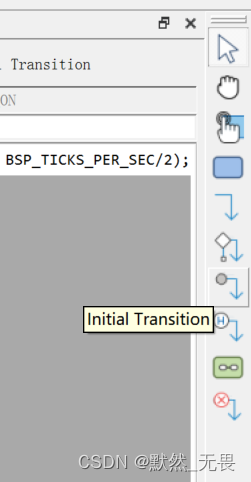
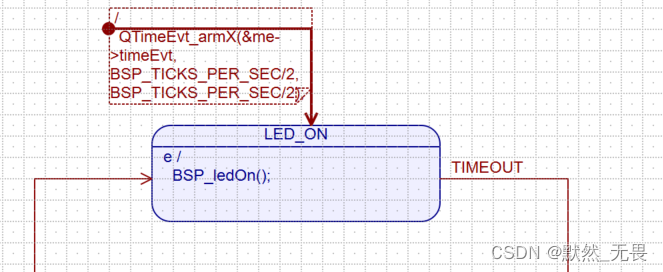
注意添加起点之后也需要增加状态机的超时的事件。
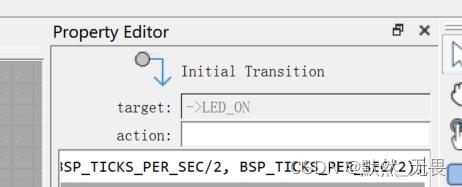
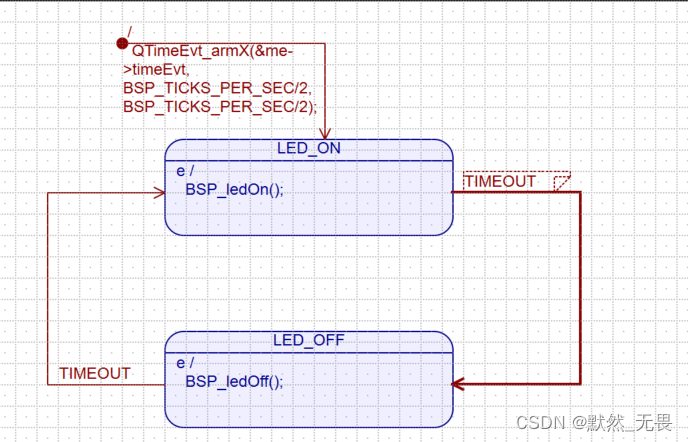
QTimeEvt_armX(&me->timeEvt, BSP_TICKS_PER_SEC/2, BSP_TICKS_PER_SEC/2);
- 1
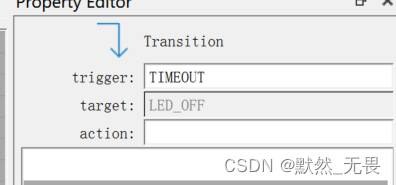
使用第一个箭头将全部的设置链接起来
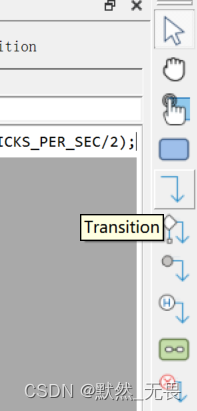
注意需要更改为TIMEOUT
结束之后的成品是这样子的
-
生成代码
与基于状态机的大多数其他图形工具相比,QM将代码生成“颠倒”了,通过QM,可以确定生成的代码结构,目录名,文件名以及每个文件中包含的元素,也可以将自己的代码与生成的代码混合,并使用QM生成尽可能多或更少的整体代码。使用QM是为了减少代码而不是真的一点点代码都不要写的,只是把逻辑部分给你生成好了。该写的还是一样的。
-
添加目录
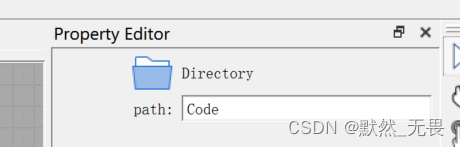
首先创建一个目录,该目录将确定磁盘上生成的文件相对于QM模型文件的位置。
在Model Explorer视图中,右键单击模型项,然后在弹出菜单中选择Add directory,这是将在其中生成代码的目录。与QM模型文件的目录路径相关联的可以在属性编辑器中进行编辑,代码将在与模型相同的目录中生成。
向目录添加源文件和头文件
-
编辑文件及编译工程
在QM中,我们可以键入自己的代码以及代码生成指令,把下面一段代码复制到文件中。
#include "qpc.h" #include <stdio.h> #include <stdlib.h> /* for exit() */ Q_DEFINE_THIS_FILE enum { BSP_TICKS_PER_SEC = 100 }; void BSP_ledOff(void) { // 添加操作代码 printf("LED OFF\n"); } void BSP_ledOn(void) { // 添加操作代码 printf("LED ON\n"); } void Q_onAssert(char const * const module, int loc) { printf("Assertion failed in %s:%d", module, loc); } void QF_onStartup(void) { NVIC_SetPriority(SysTick_IRQn, 1); // 设置中断优先级 } void QF_onCleanup(void) {} void QF_onClockTick(void) { QF_TICK_X(0U, (void *)0); /* perform the QF clock tick processing */ } enum BlinkySignals { TIMEOUT_SIG = Q_USER_SIG, MAX_SIG }; /*============== ask QM to declare the Blinky class ================*/ $declare${AOs::Blinky} static Blinky l_blinky; QActive * const AO_Blinky = &l_blinky.super; static void Blinky_ctor(void) { Blinky *me = (Blinky *)AO_Blinky; QActive_ctor(&me->super, Q_STATE_CAST(&Blinky_initial)); QTimeEvt_ctorX(&me->timeEvt, &me->super, TIMEOUT_SIG, 0U); } int StateMachine_Start() { /* statically allocate event queue buffer for the Blinky AO */ static QEvt const *blinky_queueSto[10]; QF_init(); /* initialize the framework */ Blinky_ctor(); /* explicitly call the "constructor" */ QACTIVE_START(AO_Blinky, 1U, /* priority */ blinky_queueSto, Q_DIM(blinky_queueSto), (void *)0, 0U, /* no stack */ (QEvt *)0); /* no initialization event */ return QF_run(); /* run the QF application */ } /*================ ask QM to define the Blinky class ================*/ $define${AOs::Blinky}

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
后面通过生成代码我们就可以生成代码了

生成的文件大概如下:
/*.$file${Code::Blinky.c} vvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvv*/ /* * Model: model.qm * File: ${Code::Blinky.c} * * This code has been generated by QM 5.1.4 <www.state-machine.com/qm/>. * DO NOT EDIT THIS FILE MANUALLY. All your changes will be lost. * * This program is open source software: you can redistribute it and/or * modify it under the terms of the GNU General Public License as published * by the Free Software Foundation. * * This program is distributed in the hope that it will be useful, but * WITHOUT ANY WARRANTY; without even the implied warranty of MERCHANTABILITY * or FITNESS FOR A PARTICULAR PURPOSE. See the GNU General Public License * for more details. */ /*.$endhead${Code::Blinky.c} ^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^*/ #include "main.h" #include "qpc.h" #include <stdio.h> Q_DEFINE_THIS_FILE enum { BSP_TICKS_PER_SEC = 1000 }; void BSP_ledOff(void) { HAL_GPIO_TogglePin(LED_GPIO_Port, LED_Pin); // printf("LED OFF\n"); } void BSP_ledOn(void) { HAL_GPIO_TogglePin(LED_GPIO_Port, LED_Pin); // printf("LED ON\n"); } void Q_onAssert(char const *const module, int loc) {} void QF_onStartup(void) { NVIC_SetPriority(SysTick_IRQn, 1); // 设置中断优先级 } void QF_onCleanup(void) {} void QV_onIdle(void) {} void QF_onClockTick(void) { QF_TICK_X(0U, (void *)0); /* perform the QF clock tick processing */ } enum BlinkySignals { TIMEOUT_SIG = Q_USER_SIG, MAX_SIG }; /*============== ask QM to declare the Blinky class ================*/ /*.$declare${AOs::Blinky} vvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvv*/ /*.${AOs::Blinky} ..........................................................*/ typedef struct { /* protected: */ QActive super; /* private: */ QTimeEvt TimeEvt; } Blinky; /* protected: */ static QState Blinky_initial(Blinky *const me, void const *const par); static QState Blinky_LED_ON(Blinky *const me, QEvt const *const e); static QState Blinky_LED_OFF(Blinky *const me, QEvt const *const e); /*.$enddecl${AOs::Blinky} ^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^*/ static Blinky l_blinky; QActive *const AO_Blinky = &l_blinky.super; static void Blinky_ctor(void) { Blinky *me = (Blinky *)AO_Blinky; QActive_ctor(&me->super, Q_STATE_CAST(&Blinky_initial)); QTimeEvt_ctorX(&me->TimeEvt, &me->super, TIMEOUT_SIG, 0U); } int StateMachine_Start() { /* statically allocate event queue buffer for the Blinky AO */ static QEvt const *blinky_queueSto[10]; QF_init(); /* initialize the framework */ Blinky_ctor(); /* explicitly call the "constructor" */ QACTIVE_START(AO_Blinky, 1U, /* priority */ blinky_queueSto, Q_DIM(blinky_queueSto), (void *)0, 0U, /* no stack */ (QEvt *)0); /* no initialization event */ return QF_run(); /* run the QF application */ } /*================ ask QM to define the Blinky class ================*/ /*.$skip${QP_VERSION} vvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvv*/ /*. Check for the minimum required QP version */ #if (QP_VERSION < 690U) || (QP_VERSION != ((QP_RELEASE ^ 4294967295U) % 0x3E8U)) #error qpc version 6.9.0 or higher required #endif /*.$endskip${QP_VERSION} ^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^*/ /*.$define${AOs::Blinky} vvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvv*/ /*.${AOs::Blinky} ..........................................................*/ /*.${AOs::Blinky::SM} ......................................................*/ static QState Blinky_initial(Blinky *const me, void const *const par) { /*.${AOs::Blinky::SM::initial} */ QTimeEvt_armX(&me->TimeEvt, BSP_TICKS_PER_SEC / 2, BSP_TICKS_PER_SEC / 2); return Q_TRAN(&Blinky_LED_ON); } /*.${AOs::Blinky::SM::LED_ON} ..............................................*/ static QState Blinky_LED_ON(Blinky *const me, QEvt const *const e) { QState status_; switch (e->sig) { /*.${AOs::Blinky::SM::LED_ON} */ case Q_ENTRY_SIG: { BSP_ledOn(); status_ = Q_HANDLED(); break; } /*.${AOs::Blinky::SM::LED_ON::TIMEOUT} */ case TIMEOUT_SIG: { status_ = Q_TRAN(&Blinky_LED_OFF); break; } default: { status_ = Q_SUPER(&QHsm_top); break; } } return status_; } /*.${AOs::Blinky::SM::LED_OFF} .............................................*/ static QState Blinky_LED_OFF(Blinky *const me, QEvt const *const e) { QState status_; switch (e->sig) { /*.${AOs::Blinky::SM::LED_OFF} */ case Q_ENTRY_SIG: { BSP_ledOff(); status_ = Q_HANDLED(); break; } /*.${AOs::Blinky::SM::LED_OFF::TIMEOUT} */ case TIMEOUT_SIG: { status_ = Q_TRAN(&Blinky_LED_ON); break; } default: { status_ = Q_SUPER(&QHsm_top); break; } } return status_; } /*.$enddef${AOs::Blinky} ^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^*/
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177


