
- 1微信小程序开发中的二维码扫描和生成功能_微信小程序生成二维码
- 201@Docker安装及基础命令使用详解_3.10.86 gfkfcmo@docker01 )
- 3微信小程序-弹出对话框_微信小程序 弹出对话框
- 4uni-popup实现自动弹窗
- 52022年保研面试经验_杭高院预推免面经
- 6ChatUI 快速构建聊天 机器人为例:
- 7这么精彩的排序算法,确定不来看一下?
- 8使用Anaconda Prompt安装cv2模块
- 9【AI】Java自己的LangChain!Spring AI【持续更新ing】_langchain-springboot v1.4.0
- 10scala案例练习-求各个城市的平均温度_spark编程计算各城市的平均气温实训
『FPGA通信接口』串行通信接口-SPI_fpga spi接口
赞
踩

1.SPI简介
SPI是串行外设接口(Serial Peripheral Interface)的缩写,通常说SPI接口或SPI协议都是指SPI这一种串行外设接口规范。相对于串口,SPI是一种高速的(可达10Mb\s以上),全双工,同步的通信总线。串口是点对点的全双工的异步通信,因此要通信双方按照相同的约定(指起始、暂停位、波特率)才能在数据上同步,准确通信。而SPI是一种同步通信的总线结构,同步是指有专门时钟线用来同步源端和目的端,总线结构是指主从之分,通常是一个设备做主,可以多个设备做从,也正因为如此才有了CS片选线,指定所选从设备。

在实际的应用中,通常也只是一主一从。SPI接口多应用于Flash、ADC、LCD控制器,CMOS寄存器配置接口等场景。SPI在芯片的管脚上只占用四根线,节约了芯片的管脚,同时为PCB的布局上节省空间,提供方便,正是出于这种简单易用的特性,越来越多的芯片集成了这种通信协议。
2.控制时序
SPI有四根线,如下,

(1)MISO– Master Input Slave Output,主设备数据输入,从设备数据输出;
(2)MOSI– Master Output Slave Input,主设备数据输出,从设备数据输入;
(3)SCLK – Serial Clock,时钟信号,由主设备产生;
(4)CS – Chip Select,从设备使能信号,由主设备控制。
SPI通信一般包括主设备(Master)和从设备(Slave),主设备负责发起通信并控制通信的时序,从设备则响应主设备的指令。SPI通信有四种模式,分别是模式0、模式1、模式2和模式3,不同的模式在时钟极性和相位上有所不同。这四种数据传输的时序模式,是由设备的属性的决定的,用CPOL和CPHA标识这四种时序。CPOL是用来决定SCK时钟信号空闲时的电平,CPOL=0(1),空闲电平为低电平(高电平)CPHA是用来决定采样时刻的,CPHA=0,在每个周期的第一个时钟沿采样,CPHA=1,则在每个周期的第二个时钟沿采样。 通常使用的是MODE0模式,即CPOL=CPHA=0,空闲时为低电平,在第一个时钟沿采样。其他几种模式如果需要可以上网搜索,资料很多。
使用SPI接口时需要注意,很多SPI接口的芯片并不是标准的SPI协议,可能是稍有变化,例如对哪个沿采样会有明确的说明。此外,还有一种可能是在SPI协议的基础上进一步做限制,例如要求一次读写过程结束后CS必须拉高等。SPI要求是高位在前,MSB的方式。还有就是SPI一个时钟周期必然要执行接收一位数据和发送一位数据。
3.Dual、Qual模式
上面描述的就是标准SPI,有4根引脚信号:clk , cs, mosi, miso。针对SPI Flash而言,有Dual SPI和Qual SPI两种模式,这是因为,Flash器件的全双工并不常用,因此扩展mosi和miso的用法,让它们工作在半双工,用以加倍数据传输。也就是对于Dual SPI Flash,可以发送一个命令字节进入dual mode,这样mosi变成SIO0(serial io 0),mosi变成SIO1(serial io 1),这样一个时钟周期内就能传输2个bit数据,加倍了数据传输。与Dual SPI类似,Qual SPI Flash增加了两根I/O线(SIO2,SIO3),目的是一个时钟内传输4个bit。
4.例程设计与代码解读
如图所示,把Spi_driver模块的输入输出分成两个部分,一个部分为图示左侧的与其他模块交互的接口,另一部分为图示右侧与物理管脚相连。Spi_en信号为外部的脉冲信号,收到该脉冲执行一次8Bit的发送动作,和8Bit的接收动作。通过VIO产生spi_en信号和要发送的数据信号data[7:0],将板卡上的mosi和miso管脚相连,判断发送数据和接收数据是否一致,若一致则点亮led。由于缺乏带SPI设备的板卡,故设计此例程。一次发送动作结束后会产生spi_done的脉冲信号,在发送动作执行过程中,spi_busy持续为拉高状态。另外,spi_sck作为同步时钟直接决定传输数据的速度,通常在10Mb/s以下,或者依据对端设备来指定。

在使用SPI设备时可以修改此驱动模块以满足需求,左侧信号与外部设备交互,当busy拉高的时候不允许发送spi_en信号;可以对data信号采用多路选择器,以完成某些固定的指令或者读写操作;同样,数据的位宽也可以扩展。另外,实际使用的时候应该使用cs管脚,按照相关设备的要求灵活运用该管脚。
下面代码在硬件板卡上完成测试。该代码使用MODE0,即CPOL=CPHA=0的模式。程序分为以下四步,第一步产生sck同步时钟,第二步依据en指示信号写数据,第三步依据en指示信号并发读数据,第四步产生ui交互信号。
module spi_wr( input clk_i , //user interface // input spi_en ,//其他模块的spi使能信号 // input [7:0]data , output spi_busy ,//指示spi的状态,表示SPI过程 output spi_done ,//指示spi结束一次动作 output led , // output spi_cs ,//SPI从机的片选信号,低电平有效。 output spi_clk ,//主从机之间的数据同步时钟。 output spi_mosi ,//数据引脚,主机输出,从机输入。 input spi_miso //数据引脚,主机输入,从机输出。 ); // assign spi_cs = 0; //1.同步时钟产生模块 用50MHz分频为50KHz assign spi_clk = m_clk; parameter [9:0] SPI_DIV = 10'd499;//分频定为50KHz,50Mhz/50K/2- 1'b1=499 reg [9:0] clk_cnt = 10'd0;//分频计数器 always@(posedge clk_i)begin if(clk_cnt < SPI_DIV&&spi_busy) clk_cnt <= clk_cnt + 1'b1; else clk_cnt <= 10'd0; end reg m_clk = 1'b0; always@(posedge clk_i)begin if(spi_en) m_clk <= 1'b0; else if(clk_cnt==SPI_DIV) m_clk <= ~m_clk; end //2.接收en信号和数据,执行spi mosi操作(写数据) //计数发送个数 reg [3:0]tx_cnt = 0; always@(posedge clk_i)begin if(spi_en)begin tx_cnt <= 0; end else if((clk_cnt == SPI_DIV)&&(tx_cnt==4'd8))begin tx_cnt <= 0; end else if((clk_cnt == SPI_DIV)&&spi_clk==0) tx_cnt<=tx_cnt+1; end //移位寄存器发送 wire [7:0]data; reg [7:0]data_reg=8'b0;//数据源 always@(posedge clk_i)begin if(spi_en) data_reg <= data; else if(spi_done) data_reg <=8'b0; else if(clk_cnt == SPI_DIV&&spi_clk==1) data_reg[7:0] <= {data_reg[6:0],data_reg[7]}; end assign spi_mosi = data_reg[7]; //3.接收en信号和数据,执行spi miso操作(读数据) reg [7:0]data_fifo=8'b0; always@(posedge clk_i)begin if((clk_cnt == SPI_DIV)&&spi_clk==0)begin case (tx_cnt) 0 : data_fifo[7] <= spi_miso; 1 : data_fifo[6] <= spi_miso; 2 : data_fifo[5] <= spi_miso; 3 : data_fifo[4] <= spi_miso; 4 : data_fifo[3] <= spi_miso; 5 : data_fifo[2] <= spi_miso; 6 : data_fifo[1] <= spi_miso; 7 : data_fifo[0] <= spi_miso; default: ; endcase end else data_fifo <= data_fifo; end //4.发出user interface相关指示信号 wire spi_en; reg spi_busy =0; assign spi_done = ((clk_cnt == SPI_DIV)&&(tx_cnt==4'd8)) ? 1'b1 : 1'b0; assign led = (data_fifo==8'b11010111) ? 1'b1 : 1'b0; //产生busy信号,指示spi进程 always@(posedge clk_i)begin if(spi_en) spi_busy<=1'b1; else if(spi_done) spi_busy<=1'b0; else spi_busy<=spi_busy; end vio_0 use_vio ( .clk(clk_i), // input wire clk .probe_out0(spi_en), // output wire [0 : 0] probe_out0 .probe_out1(data) // output wire [7 : 0] probe_out1 ); ila_0 your_instance_name ( .clk(clk_i), // input wire clk .probe0({data_reg,data_fifo}), // input wire [15:0] probe0 .probe1(tx_cnt), // input wire [3:0] probe1 .probe2({spi_en,spi_mosi,spi_miso,spi_busy}) // input wire [3:0] probe2 );

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
5.SPI接口实战应用
给一款以SPI寄存器接口作为接口的芯片写一个SPI控制器大概需要三步,首先搞清楚芯片datasheet对于SPI接口的时序要求,每个芯片都可能有特殊的一面。然后,根据芯片要求设计程序完成仿真验证。最后,RTL设计,布局布线上板测试。
5.1时序要求
-
系统对于SPI读写发生的时隙做了规定,即上电之后经过一系列步骤等reset拉高之后的10us之后。
-
在使用PLL时钟的情况下,最大的SPI的时钟为10MHz,如下。为了精准的控制每一个上升沿和下降沿的数据,使用手动的方式生成这个时钟,用户时钟为50MHz,因此分频的时钟周期为20ns。

-
根据datasheet提及的SPI时序,首先应该在按照上电时序要求的情况下把ss_n拉低。
-
手册要求,ss_n拉低之后需要保持一个spi的时钟周期才能给spi时钟。

-
该芯片的SPI的时序是,第一个时钟边沿是上升沿,直接在第一个边沿就加载数据了。此处加载的是写入的9bit宽的地址值,注意此处是,MSB.

-
注意读写之间的切换,与标准的SPI的时序不同,是在spiclk的下降沿抓取数据。
5.2仿真时序图

5.3代码设计
源码工程见文末
①init模块完成系统对于上电时序的要求,上电后10us给时钟,时钟给到后的10us才开始复位拉高,控制SPI Upload在reset 10us之后开始;
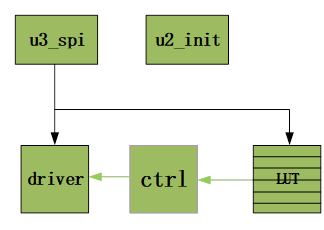
②形成四个模块,各司其职。spi_ctrl模块控制读写寄存器的顺序以满足配置顺序要求;LUT模块将每个寄存器的将要写入的内容提前编辑好,配合ctrl完成读写配置;spi_driver模块根据ctrl模块的读写命令指示和lut的寄存器地址和写入数据驱动spi接口写入数据;top模块将三个子模块例化保持与design_top的通信。
③当开始spi upload后,spi_ctrl模块将按照预先编辑好的查找表,按顺序写入寄存器,其中需要注意有一个环节要读时钟管理寄存器的状态,状态正常后才能继续写,这点尤为重要。
6.传送门
| END |
Copyright © 2003-2013 www.wpsshop.cn 版权所有,并保留所有权利。

