
- 1pycharm安装教程-pycharm安装详细步骤(Mac版)_pycharm mac版本
- 2RabbitMQ之死信交换机
- 3堡垒机的安装及使用_linux怎么安装堡垒机
- 4云计算练习题_5. 将/centos7/dvd/packages目录中以vsftpd开头的软件包,拷贝到/opt下
- 5ChatGPT商业网站源码/支持GPT4.0/ai绘画(MJ绘画模型)/用户会员套餐/赚取收益/实时语音识别输入/文章资讯发布功能/邀请分佣功能/后台一键版本更新!_chatgpt网站源码
- 6FPGA时序约束--实战篇(Vivado添加时序约束)_vivado 怎么添加时序
- 7关于机壳地和板子地(GND)的连接_外壳地和电源地怎么连接
- 8Python-opencv学习第十三课:图像像素值统计_python处理图片像元数目
- 9(南京观海微电子)——EDP简介_edp接口抗rf干扰
- 10云计算——ACA学习 云计算核心技术_ali云 aca
移动机器人路径规划方法概览
赞
踩
概述
在路径规划中,几个名词的含义为:
完备性:是指如果在起始点和目标点间有路径解存在,那么一定可以得到解,如果得不到解那么一定说明没有解存在;
概率完备性:是指如果在起始点和目标点间有路径解存在,只要规划或搜索的时间足够长,就一定能确保找到一条路径解;
最优性:是指规划得到的路径在某个评价指标上是最优的(评价指标一般为路径的长度);
渐进最优性:是指经过有限次规划迭代后得到的路径是接近最优的次优路径,且每次迭代后都与最优路径更加接近,是一个逐渐收敛的过程;

路径规划的过程大致如下图所示,主要包括信息获取-感知-通信-决策-控制-执行,一般狭义的路径规划指的是决策部分。

主要方法
基于图搜索的规划方法
基于图搜索的方法是最常见的路径规划方法,不仅在机器人,甚至在网络中(如路由的寻路转发中)也有广泛的应用。
几种经典的方法,包括Floyd,Bellman-Ford,Dijkstra,A*我在这里就不赘述了,相关的资料以及十分齐全了。这里主要介绍一些A*的改进版。
D*
D*是Anthony Stentz 1994年发表在ICRA上的, Optimal and Efficient Path Planning for Partially-KnownEnvironments 。关于D*算法我之前写了一篇博客,感兴趣可以戳链接。相比A-star算法,D-star的主要特点就是由目标位置开始向起始位置进行路径搜索,当物体由起始位置向目标位置运行过程中,发现路径中存在新的障碍时,对于目标位置到新障碍之间的范围内的路径节点,新的障碍是不会影响到其到目标的路径的。新障碍只会影响的是物体所在位置到障碍之间范围的节点的路径。通过将新的障碍周围的节点加入到Openlist中进行处理然后向物体所在位置进行传播,能最小程度的减少计算开销。D*路径搜索的过程和Dijkstra算法比较像,A-star算法中f(n)=g(n)+h(n),h(n)在D-star中并没有体现,路径的搜索并没有A-star所具有的方向感,即朝着目标搜索的感觉,这种搜索更多的是一种由目标位置向四周发散搜索,直到把起始位置纳入搜索范围为止,因此,D_star算法虽然能够在障碍物发生变化时找到一条路径,但不一定是一条最短的路径
LPA*
Lifelong Planning A*是Sven Koenig 和 Maxim Likhachev在2004发表在Artificial Intelligence上的。这个方法在A*的基础上,加了一步对cost变化的处理。定义了一个rhs函数
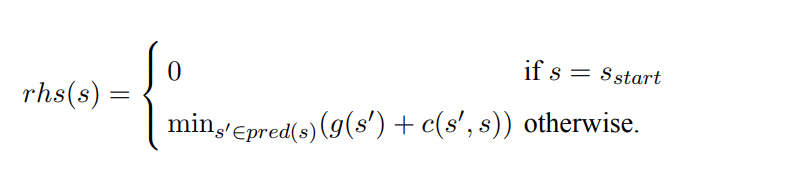
rhs函数的作用是通过前瞻一步的方式来判断cost的变化。同时定义了三种状态
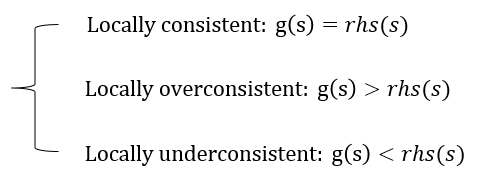
处于局部一致状态就是说明环境中的最短路径没有发生改变,处于过一致状态说明可以通过改变父节点降低当前的cost,处于欠一致状态则说明由于某个父节点的cost发生变化导致最短路径的cost变大,需要重新规划。伪代码中对应的是下图红框部分
- 使用Java操作Redis的方案很多,Jedis是目前较为流行的一种方案,除了Jedis,还有很多其他解决方案,如下:除了这些方案之外,还有一个使用也相当多的方案,就是SpringDataRedis。在传统的SSM中,需要开发者自己来配置S... [详细]
赞
踩
- SpringBoot注册自己的Servlet(三种方式)(内含源代码)方法1:使用servlet3.0规范提供的注解方式注册Servlet1,声明servlet及映射2,加上@ServletComponentScan才会扫描加了这个注解运行... [详细]
赞
踩
- article
Caddi Programming Contest 2021(AtCoder Beginner Contest 193) F.Zebraness(最小割)_[abc193f] zebraness 题解
题目一个n*n(n<=100)的网格图,只由'B'、'W'、'?'三种字符构成,'?'表示你填'B'或'W'都可以现在要确定填?的方案,使得这张网格图中相邻的异色对对数最大对于(i,j),认为它和(i+1,j)、(i-1,j)、(i,j-1... [详细]赞
踩
- 斯坦福的Alpaca是一种基于指令执行的语言模型,它可以根据用户给出的指令,生成不同类型的文本内容,例如诗歌、故事、代码等。Alpaca的特点是它可以快速地适应新的任务和数据集,而不需要重新训练或微调。Alpaca的目标是为学术界提供一个强... [详细]
赞
踩
- 主流消息中间件ActiveMQ、RabbitMQ、RocketMQ、Kafka的特性对比和应用场景_中间消息件kafka对比中间消息件kafka对比消息中间件的主要使用场景1.异步处理非核心系统流程异步化,提高系统响应性能:同步处理:用户注... [详细]
赞
踩
- 给定一棵N个节点的树,要求增加若干条边,把这棵树扩充为完全图,并满足图的唯一最小生成树仍然是这棵树。求增加的边的权值总和最小是多少。注意:树中的所有边权均为整数,且新加的所有边权也必须为整数。输入格式第一行包含整数t,表示共有t组测试数据。... [详细]
赞
踩
- TensorFlow简介本节将从五个方面对TensorFlow进行一个简单的介绍。包括TensorFlow是什么、为什么选择TensorFlow、TensorFlow的发展、TensorFlow能干什么以及TensorFlow的核心理念。1... [详细]
赞
踩
- Stream流。Java8、9、10、11新特性Java8新特性Stream流Java9新特性1、先说结论①try语法升级②String底层数据存储结构发生改变③InputStream加强④加强Stream流⑤只读集合.of()⑥Optio... [详细]
赞
踩
- 我使用的是SpringBoot2.16而在这个版本中getHibernateProperties已经被弃用了报错情况:在设置多数据源的默认数据源时,我们通常这样写packagewen.datademo.comm;importorg.spri... [详细]
赞
踩
- JDK是Java语言的软件开发工具包,主要用于移动设备、嵌入式设备上的java应用程序。JDK是整个java开发的核心,它包含了JAVA的运行环境(JVM+Java系统类库)和JAVA工具。_jdk常用版本jdk常用版本文章目录1.发布特点... [详细]
赞
踩
- 使用keras进行训练,默认使用单显卡,即使设置了os.environ['CUDA_VISIBLE_DEVICES']为两张显卡,也只是占满了显存,再设置tf.GPUOptions(allow_growth=True)之后可以清楚看到,只占... [详细]
赞
踩
- Java8(又称为jdk1.8)是Java语言开发的一一个主要版本。Java8是oracle公司于2014年3月发布,可以看成是自Java5以来最具革命性的版本。Java8为Java语言、编译器、类库、开发工具与JVM带来了大量新特性。:速... [详细]
赞
踩
- 个人用户安装JDK下载jdk-11.0.11_linux-x64_bin.tar.gz,并解压tar-xzvfjdk-11.0.11_linux-x64_bin.tar.gz进入主文件夹:/public/name配置环境变量:vim.bas... [详细]
赞
踩
- 官方TensorFlowDocker映像位于tensorflow/tensorflowDockerHub代码库中。映像版本按照以下格式进行标记:标记 说明latest TensorFlowCPU二进制映像的最新版本。默认。nightly T... [详细]
赞
踩
- .markdown-body{line-height:1.75;font-weight:400;font-size:16px;overflow-x:hidden;color:rgba(51,51,51,1)}.markdown-bodyh1... [详细]
赞
踩
- 很多情况下,希望应用程序搭建一套,为每个用户建立一个私有的数据库,所有程序使用一套.开动吧:一、首先继承AbstractRoutingDataSource,从名称上看为抽象路由数据源,就是spring为提供动态数据库而设定的。在这个类中,需... [详细]
赞
踩
- “D*算法”的名称源自DynamicAStar,最初由AnthonyStentz于“OptimalandEfficientPathPlanningforPartially-KnownEnvironments”中介绍。它是一种增量式启发式的路... [详细]
赞
踩
- 在这篇文章中,我们将详细介绍如何使用R语言实现支持向量机分类,并提供相应的源代码。如果你对支持向量机的其他方面或R语言的机器学习应用有更多的兴趣,可以进一步探索相关资料和代码示例。在R中,有几个常用的包可以用于支持向量机分类,其中最流行的是... [详细]
赞
踩
- 速度更快-优化底层源码,比如HashMap、ConcurrentHashMap代码更少-添加新的语法Lambda表达式强大的StreamAPI便于并行最大化减少空指针异常-OptionalLambda是一个匿名函数(方法),允许把函数作为一... [详细]
赞
踩
- 用Python实现随机森林算法;随机森林算法示例_随机森林模型代码随机森林模型代码什么是随机森林?随机森林(RandomForest)是一种集成学习(EnsembleLearning)算法,它将多个决策树(DecisionTree)组合在一... [详细]
赞
踩

