- 1tiktok标签化推送机制,tiktok怎样高效的寻找和使用素材
- 2用Python一分钟搞定,从几百个Excel中查找数据_python从多个excel表中提取多个元素
- 3git 常用命令 git fetch命令
- 4解决Windows找不到XAPOFX1_5.dll文件无法运行程序问题_xapofx1 5 dll找不到
- 5实战美年健康AI大赛之四_复赛使用数加平台
- 6三.数据库基础-国产数据库-华为GaussDB高斯学习这一篇就够了(详细)_华为高斯数据库
- 7idea 远程调试sparck scala_scala怎么idea调试
- 8Leetcode 90. 子集 II
- 9NLP文本输出评价方法_wer nlp
- 10小程序:浅谈小程序更新机制,发版后多久能全覆盖_微信小程序发布后多久生效
理论:(1)卡方分布、非中心卡方分布详解 (概念、求阈值方法、非中心化参数求解办法等)
赞
踩
//======================================================================//
GNSS/INS紧组合导航系统完好性监测(理论和c++代码)专栏,后续会开源全部代码
https://blog.csdn.net/hltt3838/category_12207970.html?spm=1001.2014.3001.5482
//======================================================================//
目录
一、相关概念
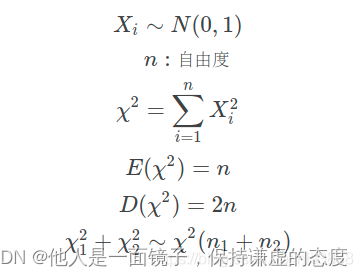
1、卡方分布
若n个 相互独立 的随机变量 ξ₁、ξ₂、……、ξn ,均服从 标准正态分布N(0,1),则这n个服从标准正态分布的随机变量的 平方和 构成一新的随机变量,其分布规律称为卡方分布(chi-squaredistribution);其中参数n称为自由度(通俗讲,样本中独立或能自由变化的自变量的个数,称为自由度),正如正态分布中均值或方差不同就是另一个正态分布一样,自由度不同就是另一个分布;其表达如下:
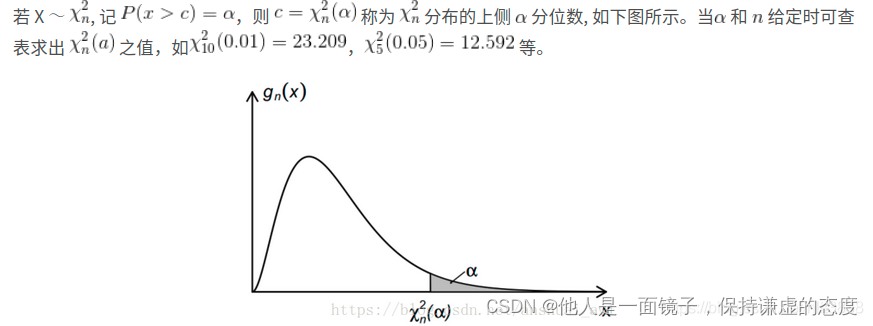
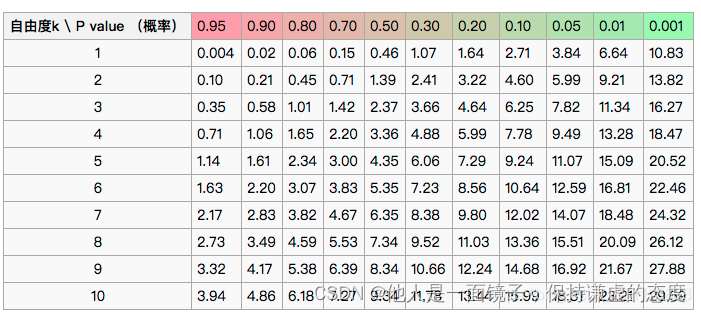
概率密度函数和卡方分布表如下:
下表即为卡方分布表,第一列为自由度 (n),第一行为显著水平 (α),据此可以查找到临界值,如果检验统计量
大于临界值,则检验统计量就位于拒绝域以内,说明观察结果与期望结果之间的差异显著 (也是完好性判断的本质)
- 什么是显著水平 ?(其实就是 误警率)
2、卡方分布计算方法:
- 卡方分布在线计算网址:
Chi Square Calculator - ChiSquareTable.net
- 也可以用pyhon写程序,代码如下:
from scipy.stats import norm
from scipy.stats.distributions import chi2
from scipy.stats import ncx2# 完好性风险相关:(风险概率,均值, 方差)
ppf_1 = norm.ppf(q=0.99999, loc=0, scale=1)
print(ppf_1)# 卡方分布相关:(1-P_FA, 自由度)
ppf_2 = chi2.ppf(0.99999, df=3)
print(ppf_2)
# 非中心参数相关:(1-P_MD, 自由度,非中心化参数)
ppf_3 = ncx2.ppf(0.999, 3, 2.785)
print(ppf_3)
- 也可以用MATLAB 语句
chi2inv(1-P_FA, 自由度)
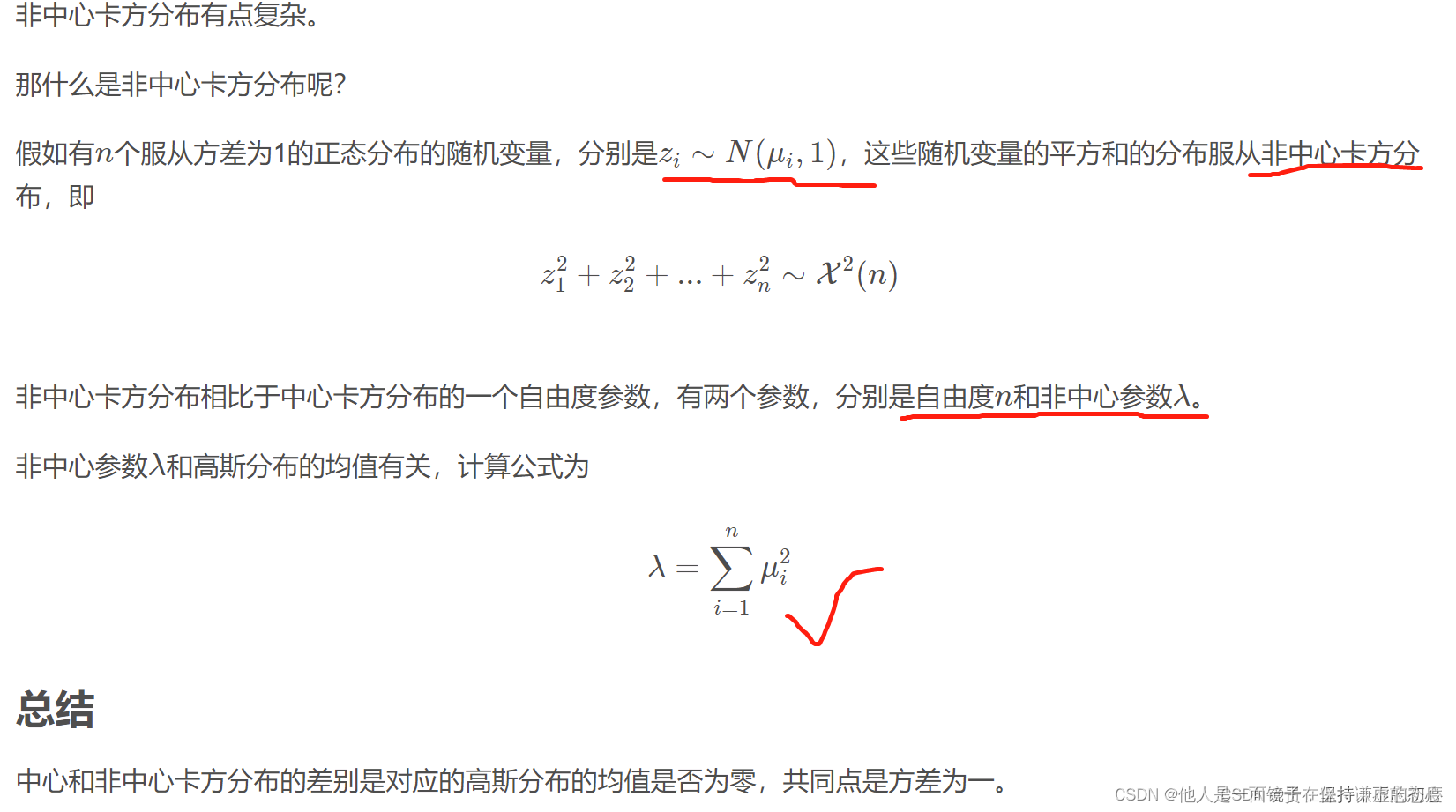
3、非中心卡方分布



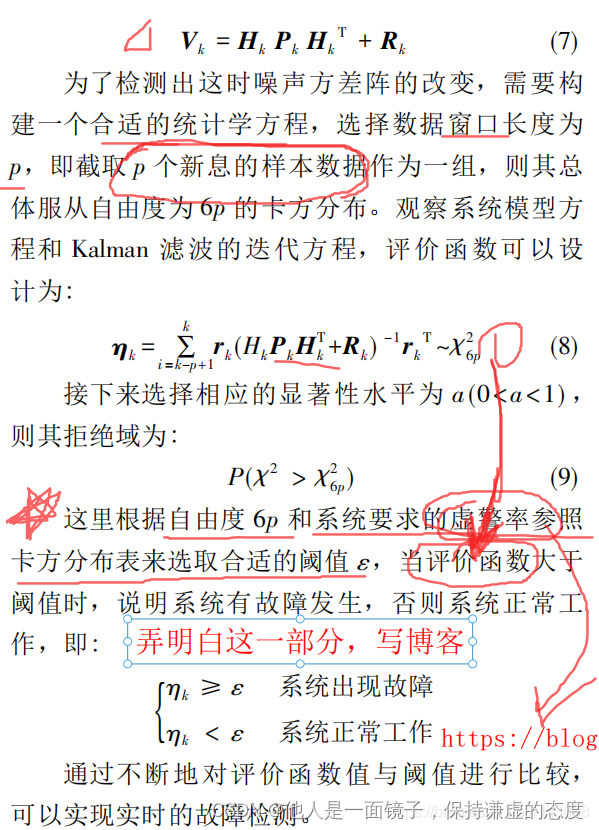
二、卡方分布在组合导航故障检测中的作用
1、举例:

理解:卡方分布在第一象限内,卡方值都是正值,呈正偏态(右偏态),随着参数 n 的增大;卡方分布趋近于正态分布;随着自由度n的增大,卡方分布向正无穷方向延伸(因为均值n越来越大),分布曲线也越来越低阔(因为方差2n越来越大)概率是概率密度函数的区间积分!
2、非中心化参数求解
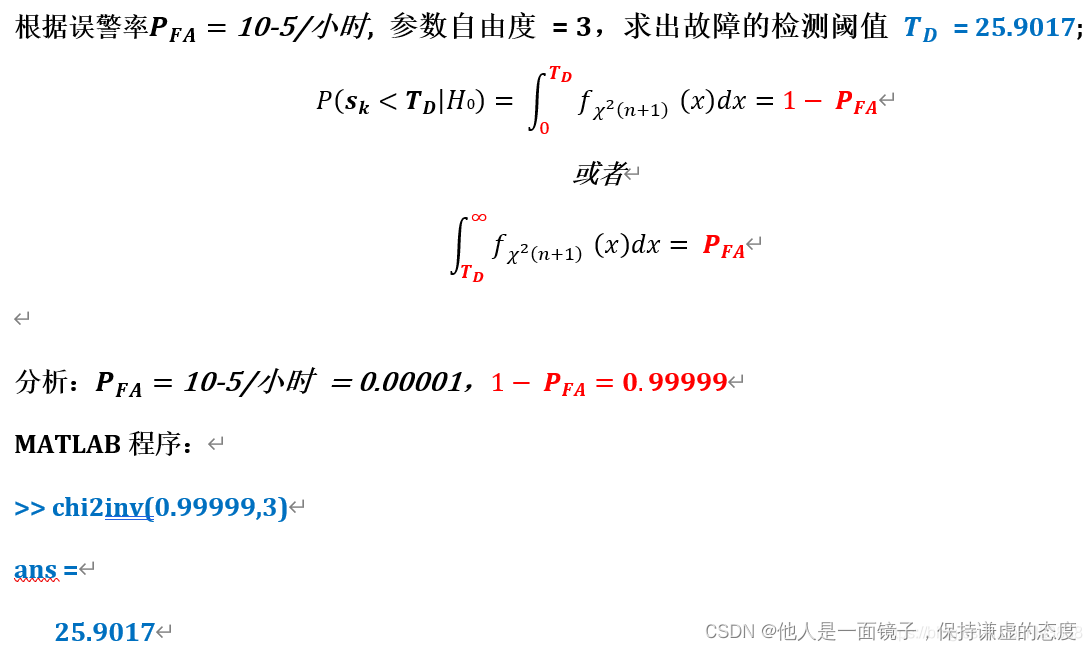
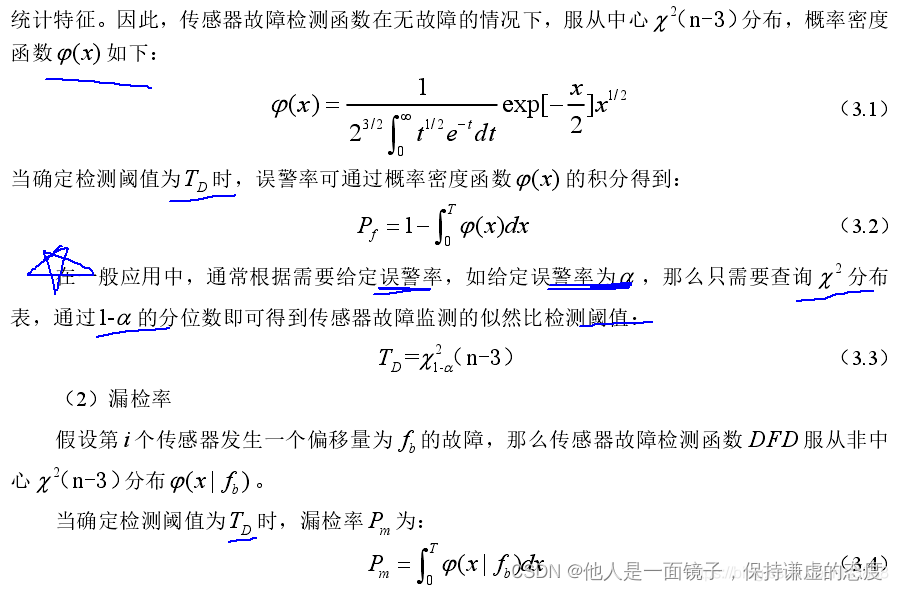
(1)求卡方分布的检测阈值
(2)求非中心化参数(C++环境编译,亲测有效)
sn:自由度、T检测阈值、0.00001:漏检概率
#include <boost/math/distributions/non_central_chi_squared.hpp>
double lam = boost::math::non_central_chi_squared_distribution<double>::find_non_centrality(sn, T, 1 - 0.00001);