
热门标签
热门文章
- 1将本地仓库上传到github
- 2多对一!分组查询!MySQL分组函数,聚合函数,分组查询_多对少分组
- 3微前端:qiankun的两种运作模式_registermicroapps
- 4差分与二维差分_二维函数的常用有限差分公式
- 52024年第十四届 Mathorcup (B题)| 甲骨文智能识别 | 深度学习 计算机视觉 |数学建模完整代码+建模过程全解全析
- 6【算法】bfs与dfs算法解决FloodFill(图像渲染、岛屿问题、区域)问题(C++)_bfs 和 dfs结合的flood fill 算法
- 7多场景叠加的一个方法_foreach (string name in _strscenenmaes)
- 8Kafka新手指南,轻松安装和配置!_kafka安装配置教程
- 9Ubuntu 16.04 64位 安装 modelsim_ubuntu 16.04 lts安装modelsim se 2020.4
- 10mysql牛客刷题(非技术快速入门)_牛客网mysql刷题
当前位置: article > 正文
python图像形态学操作——膨胀,腐蚀;开运算,闭运算_cv2腐蚀膨胀
作者:2023面试高手 | 2024-04-17 18:42:32
赞
踩
cv2腐蚀膨胀
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
图像形态学操作——膨胀,腐蚀;开运算,闭运算
形态学,是图像处理中应用最为广泛的技术之一,主要用于从图像中提取对表达和描绘区域形状有意义的图像分量,使后续的识别工作能够抓住目标对象最为本质的形状特征。
图像的膨胀(Dilation)和腐蚀(Erosion)是两种基本的形态学运算,其中膨胀类似于“领域扩张”,将图像中的白色部分进行扩张,其运行结果图比原图的白色区域更大;腐蚀类似于“领域被蚕食”,将图像中白色部分进行缩减细化,其运行结果图比原图的白色区域更小。
下图:(原图,腐蚀,膨胀)



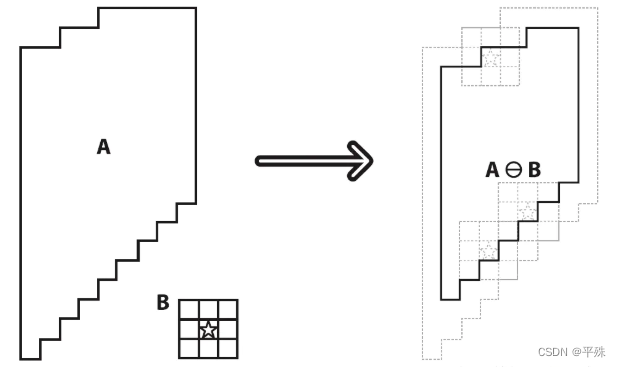
一、图像腐蚀
腐蚀的运算符是“-”,其定义如下:

该公式表示图像A用卷积模板B来进行腐蚀处理,通过模板B与图像A进行卷积计算,得出B覆盖 区域的像素点最小值,并用这个最小值来替代参考点的像素值。
代码:
1.cv2.erode()函数
函数:
ero = cv2.erode(src,kernel,anchor,iterations)
参数1:src,原图像
参数2:kernel,腐蚀操作的内核,默认为一个简单的 3x3 矩
参数3:anchor,默认为Point(-1,-1),内核中心点
参数4:iterations,腐蚀次数,默认值1
- 1
- 2
- 3
- 4
- 5
- 6
#1.读取图片
import cv2
import matplotlib.pyplot as plt
import numpy as np
img = cv2.imread("/kaggle/input/morphology/morphology.png", cv2.IMREAD_UNCHANGED)
plt.imshow(img)
plt.axis('off')#关闭坐标系
plt.show()
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
#2.图片灰度化(已经是灰度图片则不用做这一步) def rgb2gray(rgb):#灰度化 """ rgb 2 gray Args: rgb image Returns: gray image """ gray = rgb[:, :, 0] * 0.299 + rgb[:, :, 1] * 0.587 + rgb[:, :, 2] * 0.114 return gray img = rgb2gray(img) #2.灰度图片二值化 def thre_bin(gray_image, threshold=170): #二值化 """ binary image Args: gray_image:image with gray scale threshold:the split standard Returns: bin image """ threshold_image = np.zeros(shape=(gray_image.shape[0], gray_image.shape[1]), dtype=np.uint8) # loop for every pixel for i in range(gray_image.shape[0]): for j in range(gray_image.shape[1]): if gray_image[i][j] > threshold: threshold_image[i][j] = 1 else: threshold_image[i][j] = 0 return threshold_image bin_image = thre_bin(img) #3.腐蚀(写法1) #定义一个3*3的卷积核 kernel=np.ones((3,3),np.uint8) #图像腐蚀:cv2.erode(输入图像,卷积核,iterations=腐蚀的次数) erosion = cv2.erode(bin_image, kernel,iterations=1) plt.imshow(erosion,cmap="gray") plt.axis('off')#关闭坐标系 plt.show()

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45

#3.腐蚀(写法2)#效果和方法1完全相同的,原理式写法 def erode_bin_image(img):#输入x为二值图像;#腐蚀 K_size = 3 #kernle K= np.array([[1, 1, 1],[1, 1, 1], [1, 1,1]],dtype=int) H, W = img.shape # zero padding pad = K_size // 2 out = np.ones((H + pad * 2, W + pad * 2), dtype=np.int)*255 out[pad: pad + H, pad: pad + W] = img.copy().astype(np.float) tmp = out.copy() # filtering for y in range(H): for x in range(W): out[pad + y, pad + x] = np.min(K * (tmp[y: y + K_size, x: x + K_size])) #out = np.clip(out, 0, 255) # 将值限制在给定的上下界 out = out[pad: pad + H, pad: pad + W].astype(np.uint8) return out erode_image=erode_bin_image(bin_image) plt.imshow(erode_image,cmap="gray") plt.axis('off')#关闭坐标系 plt.show() #效果和方法1完全相同
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
二、膨胀
膨胀的运算符是“⊕”,其定义如下:

该公式表示用B来对图像A进行膨胀处理,其中B是一个卷积模板或卷积核,其形状可以为正方形或圆形,通过模板B与图像A进行卷积计算,得出B覆盖区域的像素点最大值,并用该值替换参考点的像素值实现膨胀。
代码
cv2.dilate()函数
函数:
dst = cv2.dilate(src, kernel, iterations)
参数:
dst表示处理的结果,
src表示原图像,
kernel表示卷积核,
iterations表示迭代次数。
注意:迭代次数默认是1,表示进行一次膨胀,也可以根据需要进行多次迭代,进行多次膨胀。通常进行1次膨胀即可。
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
#1.写法1
#此处bin_image是二值图像,如果输入图像不是二值图像,可用上面的代码处理
kernel=np.ones((3,3),np.uint8)
dilation=cv2.dilate(bin_image,kernel,iterations=1)
plt.imshow(dilation,cmap="gray")
plt.axis('off')#关闭坐标系
plt.show()
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8

#写法2,#效果和方法1完全相同的,原理式写法 def dilate_bin_image(img):#输入x为二值图像;#膨胀 K_size = 3 #kernle K= np.array([[1, 1, 1],[1, 1, 1], [1, 1,1]],dtype=int) H, W = img.shape # zero padding pad = K_size // 2 out = np.zeros((H + pad * 2, W + pad * 2), dtype=np.float) out[pad: pad + H, pad: pad + W] = img.copy().astype(np.float) tmp = out.copy() # filtering for y in range(H): for x in range(W): out[pad + y, pad + x] = np.max(K * (tmp[y: y + K_size, x: x + K_size])) #out = np.clip(out, 0, 255) # 将值限制在给定的上下界 out = out[pad: pad + H, pad: pad + W].astype(np.uint8) return out dilate_image=dilate_bin_image(bin_image) plt.imshow(dilate_image,cmap="gray") plt.axis('off')#关闭坐标系 plt.show() #效果和方法1完全相同
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
开运算
开运算 = 先腐蚀运算,再膨胀运算(看上去把细微连在一起的两块目标分开了)

开运算总结:
- 开运算能够除去孤立的小点,毛刺和小桥,而总的位置和形状不变。
- 开运算是一个基于几何运算的滤波器。
- 结构元素大小的不同将导致滤波效果的不同。
- 不同的结构元素的选择导致了不同的分割,即提取出不同的特征。
闭运算
闭运算 = 先膨胀运算,再腐蚀运算(看上去将两个细微连接的图块封闭在一起)

闭运算总结:
-
闭运算能够填平小湖(即小孔),弥合小裂缝,而总的位置和形状不变。
-
闭运算是通过填充图像的凹角来滤波图像的。
-
结构元素大小的不同将导致滤波效果的不同。
-
不同结构元素的选择导致了不同的分割。
总结
本文总结了腐蚀和膨胀的cv2函数写法和原理式python代码写法。并总结了开运算和闭运算的原理和作用。
参考:
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/2023面试高手/article/detail/441665
推荐阅读

相关标签

