- 1【VSCode-C++-ROS-DEBUG】在vscode中对ros的C++代码debug出现的断点无效的问题解决_vscode ros debugger
- 2AI时代,你急需这份AIGC指南
- 3「Python绘图」绘制皮卡丘
- 4【数据结构】队列的使用方法
- 5如何用python编写抢票软件,python爬虫小程序抢购_python在微信小程序定时抢票
- 6缓存优化(redis)_redis time-to-live
- 7手写数字识别加法器--深度学习实验_手写数字识别实验
- 8基于overleaf 的美国大学生数学建模竞赛(美赛)latex 格式模板(含信件和附件)_美赛latex模板
- 9Flutter中的Container小部件介绍与使用_container flutter
- 10第十五篇、基于Arduino uno,获取mpu6050三轴加速度、角速度、温度的数据——结果导向_adruino使用mpu6050
无人机自主飞行实战入门-第一课(简介)_无人自主系统控制入门简单吗
赞
踩
研究的意义:对人类操作的严重依赖,严重阻碍了泛无人机行业的发展。
飞行汽车(UAM)即将到来,不论是从成本还是安全考虑都需要自主飞行。
传统飞控基于STM32架构设计,无法满足更智能功能所需的计算量,飞控是为了无人机位姿控制所设计,人类操控依然in the loop。
无人驾驶飞机简称“无人机”,英文缩写为“UAV”。利用无线电遥控设备和自备的控制导引程序的不载人飞机,或者有机载计算机完全或间歇地自主操作。

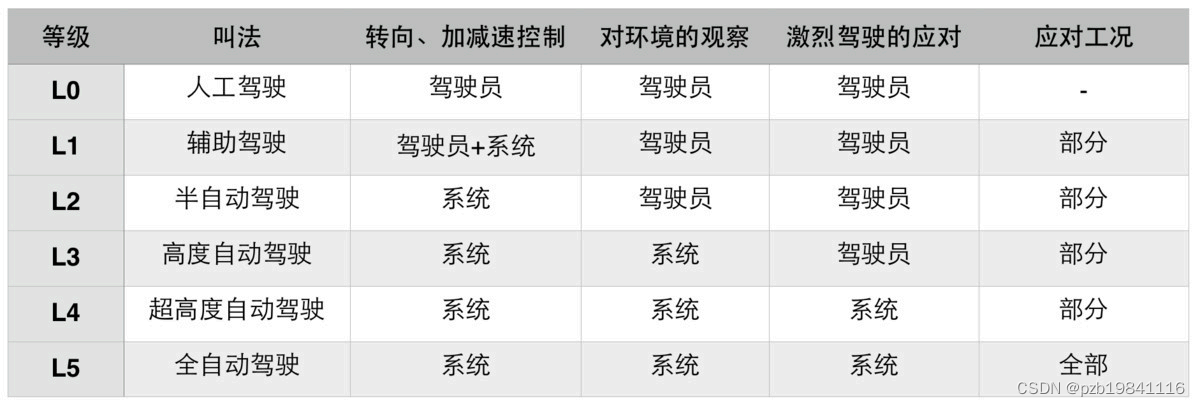
无人机中自动驾驶的等级,与车辆无人驾驶的划分是一样的。
无人机的分类
1.旋翼机;以螺旋桨旋转作为升力的主要提供办法,通过调整螺旋桨转速来维持无人机姿态的无人机。

2.直升机;同过螺旋桨旋转提供升力,通过调整主桨螺距或转速改变升力大小变化。同构十字盘完成对不同角度螺距的控制,通过调整尾桨螺距或者转速来完成航向的变化。

3.固定翼;通过翼面提供主要升力,并通过螺旋桨前拉或者后推维持空速。
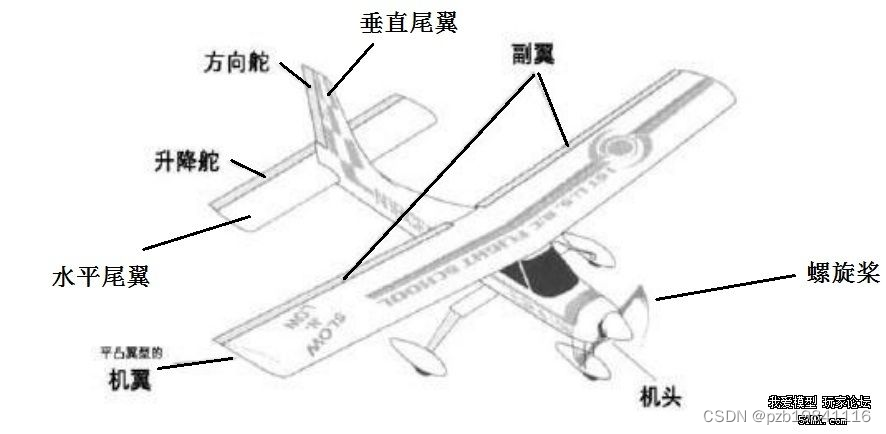
另一种固定翼,垂起固定翼;旋翼与固定翼的结合体,通过旋翼部分完成起降,在实际工作阶段使用固定翼动力模型完成飞行任务。

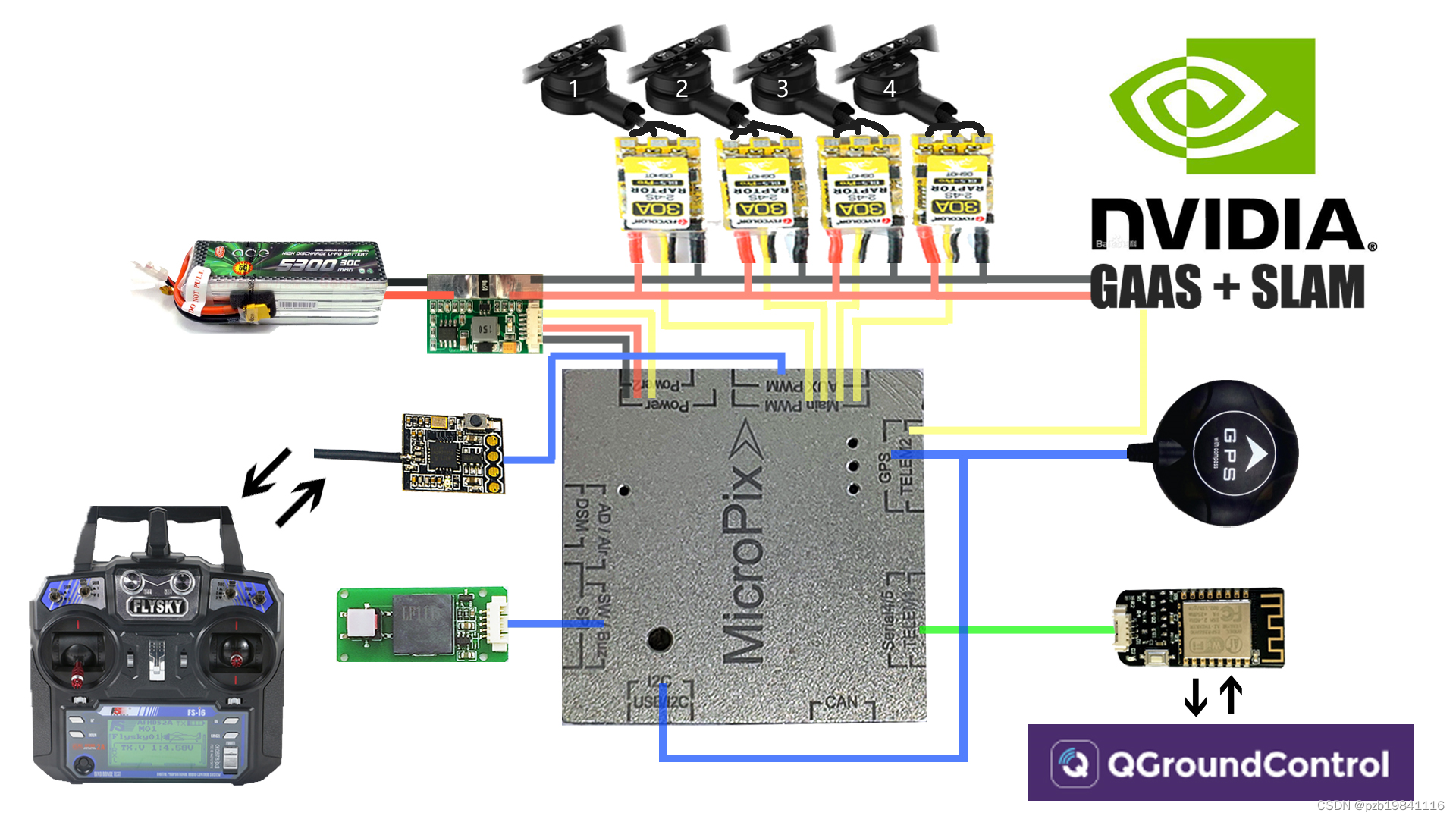
多旋翼部件组成:• 飞控;• GPS RTK;• 数传;• 电调;• 电机;• 螺旋桨;• GAAS 视觉任务模组
开源飞控发展简史
• 开源飞控鼻祖Paparazzi(PPZ),创办于2003年,众多飞控前身。
• Arduino 开源飞控,是由六位意大利交互设计学院的同学,于2005年开发创办开发。
Multi Wii Copter (MWC)是 Arduino 框架的衍生品 。
• OpenPilot 开源飞控 ,由OpenPilot社区在2009年推出。
• Ardupilot 由 3DR 的 Chris Anderson 在2009年开始推动。
• Pixhawk 由 PX4 团队和 3DR 于 2013 年联合开发。
GPS
• 用于接收 GPS 信号 ,并获取当前 GNSS 信息。
• 提供地磁信息、经纬度 、高度 、GPS航向、地速 、时间等。
• 实验平台推荐使用普通精度的 U-BLOX M8N 模组

电子调速器、电机、螺旋桨
• 读取飞控输出的 PWM 脉宽调制信号 , 根据收到的PWM信号调整换相频率,从而驱动电机完成速度的转换。
• 电机使用无刷外转子电机 ,支持三相输入 。



GAAS 视觉任务模组
• GAAS 通过搭载外部双目视觉模组 ,为无人机提供视觉 3D 路径规划/避障导航、全局跟踪、目标识别等全自主飞行功能。

整个无人机的设备连接结构图