
- 1阿里云大学考试Java高级题目及解析-java高级
- 2卫星影像联合无人机实现农业保险全生命周期监管监测
- 3IP证书申请流程
- 4国内 GitHub 开启 2FA 双重身份验证的方法-2024_github 2fa 中国
- 5共定位数据和环境准备_locuscomparer
- 6ubuntu 下启用ipv6_ubuntu开启ipv6监听
- 7基于FPGA的快速傅里叶变换(FFT)设计在嵌入式系统中的应用
- 8分组统计绘图处理matplotlib
- 9多客圈子交友系统 uniapp+thinkphp6适配小程序/H5/app/api全开源,多款插件自选,支持个性定制!
- 10小知识点:Mac M1/M2 VMware Fusion 安装 Centos 7.9(ARM 64 版本)_无法打开此虚拟机的电源,因为它需要使用 x86 计算机架构,而该架构与此 arm 计算机
详解布隆过滤器的原理和实现
赞
踩
为什么需要布隆过滤器
想象一下遇到下面的场景你会如何处理:
-
手机号是否重复注册
-
用户是否参与过某秒杀活动
-
伪造请求大量 id 查询不存在的记录,此时缓存未命中,如何避免缓存穿透
针对以上问题常规做法是:查询数据库,数据库硬扛,如果压力并不大可以使用此方法,保持简单即可。
改进做法:用 list/set/tree 维护一个元素集合,判断元素是否在集合内,时间复杂度或空间复杂度会比较高。如果是微服务的话可以用 redis 中的 list/set 数据结构, 数据规模非常大此方案的内存容量要求可能会非常高。
这些场景有个共同点,可以将问题抽象为:如何高效判断一个元素不在集合中? 那么有没有一种更好方案能达到时间复杂度和空间复杂双优呢?
有!布隆过滤器。
什么是布隆过滤器
布隆过滤器(英语:Bloom Filter)是 1970 年由布隆提出的。它实际上是一个很长的二进制向量和一系列随机映射函数。布隆过滤器可以用于检索一个元素是否在一个集合中,它的优点是空间效率和查询时间都远远超过一般的算法。
工作原理
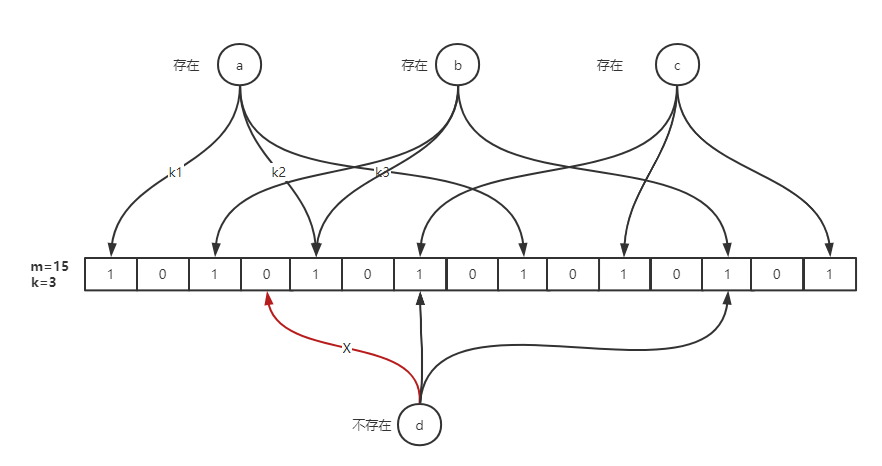
布隆过滤器的原理是,当一个元素被加入集合时,通过 K 个散列函数将这个元素映射成一个位数组中的 K 个点(offset),把它们置为 1。检索时,我们只要看看这些点是不是都是 1 就(大约)知道集合中有没有它了:如果这些点有任何一个 0,则被检元素一定不在;如果都是 1,则被检元素很可能在。这就是布隆过滤器的基本思想。
简单来说就是准备一个长度为 m 的位数组并初始化所有元素为 0,用 k 个散列函数对元素进行 k 次散列运算跟 len(m)取余得到 k 个位置并将 m 中对应位置设置为 1。
布隆过滤器优缺点
优点:
-
空间占用极小,因为本身不存储数据而是用比特位表示数据是否存在,某种程度有保密的效果。
-
插入与查询时间复杂度均为 O(k),常数级别,k 表示散列函数执行次数。
-
散列函数之间可以相互独立,可以在硬件指令层加速计算。
缺点:
-
误差(假阳性率)。
-
无法删除。
误差(假阳性率)
布隆过滤器可以 100% 判断元素不在集合中,但是当元素在集合中时可能存在误判,因为当元素非常多时散列函数产生的 k 位点可能会重复。 维基百科有关于假阳性率的数学推导(见文末链接)这里我们直接给结论(实际上是我没看懂...),假设:
-
位数组长度 m
-
散列函数个数 k
-
预期元素数量 n
-
期望误差_ε_
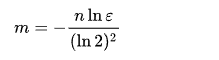
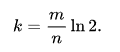
在创建布隆过滤器时我们为了找到合适的 m 和 k ,可以根据预期元素数量 n 与 ε 来推导出最合适的 m 与 k 。
java 中 Guava, Redisson 实现布隆过滤器估算最优 m 和 k 采用的就是此算法:
- // 计算哈希次数
- @VisibleForTesting
- static int optimalNumOfHashFunctions(long n, long m) {
- // (m / n) * log(2), but avoid truncation due to division!
- return Math.max(1, (int) Math.round((double) m / n * Math.log(2)));
- }
-
- // 计算位数组长度
- @VisibleForTesting
- static long optimalNumOfBits(long n, double p) {
- if (p == 0) {
- p = Double.MIN_VALUE;
- }
- return (long) (-n * Math.log(p) / (Math.log(2) * Math.log(2)));
- }
无法删除
位数组中的某些 k 点是多个元素重复使用的,假如我们将其中一个元素的 k 点全部置为 0 则直接就会影响其他元素。 这导致我们在使用布隆过滤器时无法处理元素被删除的场景。
可以通过定时重建的方式清除脏数据。假如是通过 redis 来实现的话重建时不要直接删除原有的 key,而是先生成好新的再通过 rename 命令即可,再删除旧数据即可。
go-zero 中的 bloom filter 源码分析
core/bloom/bloom.go 一个布隆过滤器具备两个核心属性:
-
位数组:
-
散列函数
go-zero实现的bloom filter中位数组采用的是Redis.bitmap,既然采用的是 redis 自然就支持分布式场景,散列函数采用的是MurmurHash3
Redis.bitmap 为什么可以作为位数组呢?
Redis 中的并没有单独的 bitmap 数据结构,底层使用的是动态字符串(SDS)实现,而 Redis 中的字符串实际都是以二进制存储的。 a 的ASCII码是 97,转换为二进制是:01100001,如果我们要将其转换为b只需要进一位即可:01100010。下面通过Redis.setbit实现这个操作:
set foo a
OK
get foo
"a"
setbit foo 6 1
0
setbit foo 7 0
1
get foo
"b"
bitmap 底层使用的动态字符串可以实现动态扩容,当 offset 到高位时其他位置 bitmap 将会自动补 0,最大支持 2^32-1 长度的位数组(占用内存 512M),需要注意的是分配大内存会阻塞Redis进程。 根据上面的算法原理可以知道实现布隆过滤器主要做三件事情:
-
k 次散列函数计算出 k 个位点。
-
插入时将位数组中 k 个位点的值设置为 1。
-
查询时根据 1 的计算结果判断 k 位点是否全部为 1,否则表示该元素一定不存在。
下面来看看go-zero 是如何实现的:
对象定义
- // 表示经过多少散列函数计算
- // 固定14次
- maps = 14
-
- type (
- // 定义布隆过滤器结构体
- Filter struct {
- bits uint
- bitSet bitSetProvider
- }
- // 位数组操作接口定义
- bitSetProvider interface {
- check([]uint) (bool, error)
- set([]uint) error
- }
- )

位数组操作接口实现
首先需要理解两段 lua 脚本:
- // ARGV:偏移量offset数组
- // KYES[1]: setbit操作的key
- // 全部设置为1
- setScript = `
- for _, offset in ipairs(ARGV) do
- redis.call("setbit", KEYS[1], offset, 1)
- end
- `
- // ARGV:偏移量offset数组
- // KYES[1]: setbit操作的key
- // 检查是否全部为1
- testScript = `
- for _, offset in ipairs(ARGV) do
- if tonumber(redis.call("getbit", KEYS[1], offset)) == 0 then
- return false
- end
- end
- return true
- `
为什么一定要用 lua 脚本呢? 因为需要保证整个操作是原子性执行的。
- // redis位数组
- type redisBitSet struct {
- store *redis.Client
- key string
- bits uint
- }
- // 检查偏移量offset数组是否全部为1
- // 是:元素可能存在
- // 否:元素一定不存在
- func (r *redisBitSet) check(offsets []uint) (bool, error) {
- args, err := r.buildOffsetArgs(offsets)
- if err != nil {
- return false, err
- }
- // 执行脚本
- resp, err := r.store.Eval(testScript, []string{r.key}, args)
- // 这里需要注意一下,底层使用的go-redis
- // redis.Nil表示key不存在的情况需特殊判断
- if err == redis.Nil {
- return false, nil
- } else if err != nil {
- return false, err
- }
-
- exists, ok := resp.(int64)
- if !ok {
- return false, nil
- }
-
- return exists == 1, nil
- }
-
- // 将k位点全部设置为1
- func (r *redisBitSet) set(offsets []uint) error {
- args, err := r.buildOffsetArgs(offsets)
- if err != nil {
- return err
- }
- _, err = r.store.Eval(setScript, []string{r.key}, args)
- // 底层使用的是go-redis,redis.Nil表示操作的key不存在
- // 需要针对key不存在的情况特殊判断
- if err == redis.Nil {
- return nil
- } else if err != nil {
- return err
- }
- return nil
- }
-
- // 构建偏移量offset字符串数组,因为go-redis执行lua脚本时参数定义为[]stringy
- // 因此需要转换一下
- func (r *redisBitSet) buildOffsetArgs(offsets []uint) ([]string, error) {
- var args []string
- for _, offset := range offsets {
- if offset >= r.bits {
- return nil, ErrTooLargeOffset
- }
- args = append(args, strconv.FormatUint(uint64(offset), 10))
- }
- return args, nil
- }
-
- // 删除
- func (r *redisBitSet) del() error {
- _, err := r.store.Del(r.key)
- return err
- }
-
- // 自动过期
- func (r *redisBitSet) expire(seconds int) error {
- return r.store.Expire(r.key, seconds)
- }
-
- func newRedisBitSet(store *redis.Client, key string, bits uint) *redisBitSet {
- return &redisBitSet{
- store: store,
- key: key,
- bits: bits,
- }
- }
到这里位数组操作就全部实现了,接下来看下如何通过 k 个散列函数计算出 k 个位点
k 次散列计算出 k 个位点
- // k次散列计算出k个offset
- func (f *Filter) getLocations(data []byte) []uint {
- // 创建指定容量的切片
- locations := make([]uint, maps)
- // maps表示k值,作者定义为了常量:14
- for i := uint(0); i < maps; i++ {
- // 哈希计算,使用的是"MurmurHash3"算法,并每次追加一个固定的i字节进行计算
- hashValue := hash.Hash(append(data, byte(i)))
- // 取下标offset
- locations[i] = uint(hashValue % uint64(f.bits))
- }
-
- return locations
- }
插入与查询
添加与查询实现就非常简单了,组合一下上面的函数就行。
- // 添加元素
- func (f *Filter) Add(data []byte) error {
- locations := f.getLocations(data)
- return f.bitSet.set(locations)
- }
-
- // 检查是否存在
- func (f *Filter) Exists(data []byte) (bool, error) {
- locations := f.getLocations(data)
- isSet, err := f.bitSet.check(locations)
- if err != nil {
- return false, err
- }
- if !isSet {
- return false, nil
- }
-
- return true, nil
- }
改进建议
整体实现非常简洁高效,那么有没有改进的空间呢?
个人认为还是有的,上面提到过自动计算最优 m 与 k 的数学公式,如果创建参数改为:
预期总数量expectedInsertions
期望误差falseProbability
就更好了,虽然作者注释里特别提到了误差说明,但是实际上作为很多开发者对位数组长度并不敏感,无法直观知道 bits 传多少预期误差会是多少。
- // New create a Filter, store is the backed redis, key is the key for the bloom filter,
- // bits is how many bits will be used, maps is how many hashes for each addition.
- // best practices:
- // elements - means how many actual elements
- // when maps = 14, formula: 0.7*(bits/maps), bits = 20*elements, the error rate is 0.000067 < 1e-4
- // for detailed error rate table, see http://pages.cs.wisc.edu/~cao/papers/summary-cache/node8.html
- func New(store *redis.Redis, key string, bits uint) *Filter {
- return &Filter{
- bits: bits,
- bitSet: newRedisBitSet(store, key, bits),
- }
- }
-
- // expectedInsertions - 预期总数量
- // falseProbability - 预期误差
- // 这里也可以改为option模式不会破坏原有的兼容性
- func NewFilter(store *redis.Redis, key string, expectedInsertions uint, falseProbability float64) *Filter {
- bits := optimalNumOfBits(expectedInsertions, falseProbability)
- k := optimalNumOfHashFunctions(bits, expectedInsertions)
- return &Filter{
- bits: bits,
- bitSet: newRedisBitSet(store, key, bits),
- k: k,
- }
- }
-
- // 计算最优哈希次数
- func optimalNumOfHashFunctions(m, n uint) uint {
- return uint(math.Round(float64(m) / float64(n) * math.Log(2)))
- }
-
- // 计算最优数组长度
- func optimalNumOfBits(n uint, p float64) uint {
- return uint(float64(-n) * math.Log(p) / (math.Log(2) * math.Log(2)))
- }
-
回到问题
如何预防非法 id 导致缓存穿透?
由于 id 不存在导致请求无法命中缓存流量直接打到数据库,同时数据库也不存在该记录导致无法写入缓存,高并发场景这无疑会极大增加数据库压力。 解决方案有两种:
-
采用布隆过滤器
数据写入数据库时需同步写入布隆过滤器,同时如果存在脏数据场景(比如:删除)则需要定时重建布隆过滤器,使用 redis 作为存储时不可以直接删除 bloom.key,可以采用 rename key 的方式更新 bloom
-
缓存与数据库同时无法命中时向缓存写入一个过期时间较短的空值。
资料
布隆过滤器(Bloom Filter)原理及 Guava 中的具体实现
项目地址
https://github.com/zeromicro/go-zero
欢迎使用 go-zero 并 star 支持我们!
微信交流群
关注『微服务实践』公众号并点击 交流群 获取社区群二维码。

