
热门标签
热门文章
- 1Docker基本管理和虚拟化
- 2Linux麒麟V10磁盘挂载步骤
- 3WPF的DataGrid的某个列绑定数据的三种方法(Binding、Converter、DataTrigger)_wpf中的datagrid怎么绑定数据库表中对应的列
- 4mysql 索引管理_MySQL索引管理
- 5Oracle Database 11.2.0.4升级到 12.2.0.1_database time zone version is 26. it is older than
- 6Vue全家桶_v ue全家桶
- 7MT2057 门票
- 8hive调用方式及数据导出_hive数据导出到excel
- 9【数据结构】这里有一份KMP算法优化的详细攻略,不要错过哦!!!_kmp 优化
- 10基于SpringBoot+MySQL的在线订餐系统
当前位置: article > 正文
【ZED】从零开始使用ZED相机(三):相机标定(张氏标定法)_zed相机教程
作者:2023面试高手 | 2024-05-20 21:16:28
赞
踩
zed相机教程
引言
关于ZED相机的安装和配置可以先参考【ZED】从零开始使用ZED相机(一):windows下的安装配置与测试
关于ZED相机的基本使用可以参考【ZED】从零开始使用ZED相机(二):打开相机+捕获图像
接下来介绍基于ZED相机的SDK实现相机的标定,标定的原理基于张氏标定法,算法这里不单独介绍,推荐讲解的链接立体视觉入门指南(3):相机标定之张式标定法【超详细值得收藏】
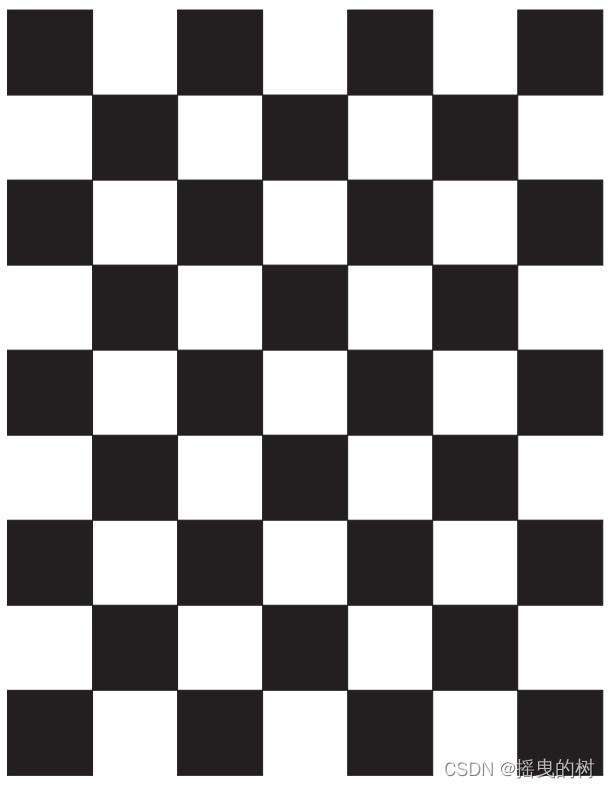
1 获取棋盘格图像
首先打印棋盘格图案,笔者打印的是7x9的棋盘格,内角点数为6x8
笔者将ZED可能调用的函数封装成一个类,初始化ZED相机以及自定义捕获图像的函数,代码如下:
import pyzed.sl as sl import cv2 import numpy as np import os class CameraZed2: def __init__(self,resolution=None,fps=30,depthMode = None): self.zed = sl.Camera() self.input_type = sl.InputType() self.init_params = sl.InitParameters(input_t=self.input_type) # 设置分辨率 if resolution == "2K": self.init_params.camera_resolution = sl.RESOLUTION.HD2K elif resolution == "1080": self.init_params.camera_resolution = sl.RESOLUTION.HD1080 else: # 默认 self.init_params.camera_resolution = sl.RESOLUTION.HD720 self.init_params.camera_fps = fps # 设置帧率 # 设置获取深度信息的模式 if depthMode == "PERFORMANCE": self.init_params.depth_mode = sl.DEPTH_MODE.PERFORMANCE elif depthMode == "QUALITY": self.init_params.depth_mode = sl.DEPTH_MODE.QUALITY else: self.init_params.depth_mode = sl.DEPTH_MODE.ULTRA self.init_params.coordinate_units = sl.UNIT.MILLIMETER # 单位毫米 # 打开相机 err = self.zed.open(self.init_params) if err != sl.ERROR_CODE.SUCCESS: print(repr(err)) self.zed.close() exit(1) self.runtime = sl.RuntimeParameters() self.runtime.sensing_mode = sl.SENSING_MODE.STANDARD self.savepath = '' # 标定图像保存的路径 def grab_imgs(self): # 捕获左右图像用于相机标定(文件夹自动创建) img_l = sl.Mat() img_r = sl.Mat() num = 0 # 自动创建保存文件夹 import time name = time.strftime("%Y-%m-%d-%H-%M", time.localtime()) self.savepath = './images/%s'% name if not os.path.exists(savepath): os.mkdir(savepath) while True: if self.zed.grab(self.runtime) == sl.ERROR_CODE.SUCCESS: self.zed.retrieve_image(img_l,sl.VIEW.LEFT) self.img_l = img_l.get_data() self.zed.retrieve_image(img_r,sl.VIEW.RIGHT) self.img_r = img_r.get_data() view = np.concatenate((self.img_l,self.img_r),axis=1) cv2.imshow('View',cv2.resize(view,(1920,540))) key = cv2.waitKey(1) if key & 0xFF == ord('s'): savePath = os.path.join(self.savepath, "L{:0>3d}.png".format(num)) cv2.imwrite(savePath, self.img_l) # savePath = os.path.join(self.savepath, "R{:0>3d}.png".format(num)) # cv2.imwrite(savePath, self.img_r) num +=1 if key & 0xFF == 27: break

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
调用类
if __name__ == "__main__":
cam = CameraZed2(resolution='1080',fps=30)
cam.grab_imgs() # 获取标定图像
- 1
- 2
- 3
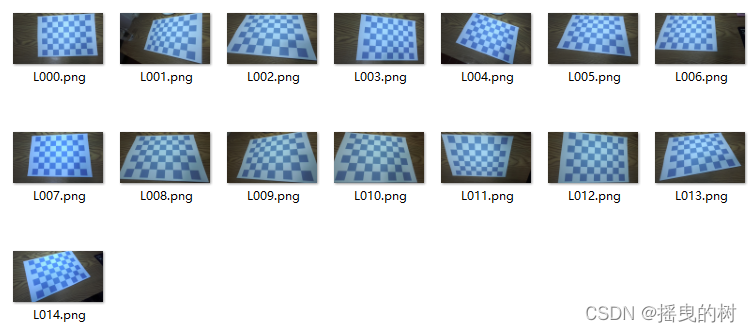
获取的棋盘格图像如下:
2 相机标定(单目)
继续在上述的类中定义相机标定函数
新增的函数定义如下:
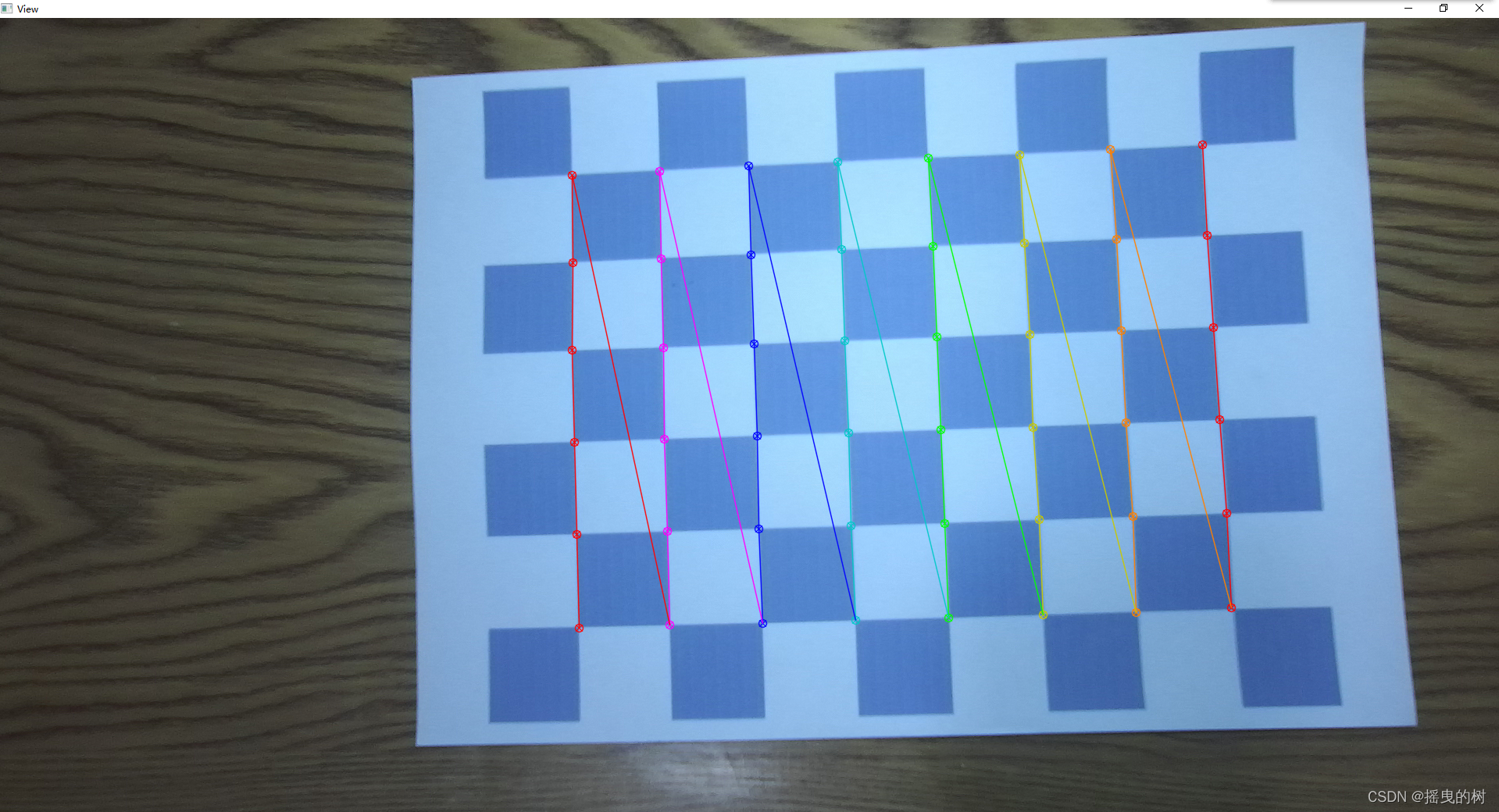
def calibrate(self,pic_points,real_points_x_y,real_points): from step.homography import get_homography from step.intrinsics import get_intrinsics_param from step.extrinsics import get_extrinsics_param from step.distortion import get_distortion from step.refine_all import refinall_all_param # 求单应矩阵 H = get_homography(pic_points, real_points_x_y) # 求内参 intrinsics_param = get_intrinsics_param(H) # 求对应每幅图外参 extrinsics_param = get_extrinsics_param(H, intrinsics_param) # 畸变矫正 k = get_distortion(intrinsics_param, extrinsics_param, pic_points, real_points_x_y) # 微调所有参数 [new_intrinsics_param, new_k, new_extrinsics_param] = refinall_all_param(intrinsics_param, k, extrinsics_param, real_points, pic_points) print("Homographic矩阵:\n",H) print("内参矩阵:\n", new_intrinsics_param) print("畸变校正系数:\n", new_k) print("外参矩阵:\n", new_extrinsics_param) # 相机标定执行函数 def cal_exe(self): # 执行校正 file_dir = r'./images' # 标定所用图像 pic_name = os.listdir(file_dir) # 由于棋盘为二维平面,设定世界坐标系在棋盘上,一个单位代表一个棋盘宽度,产生世界坐标系三维坐标 cross_corners = [6, 8] # 棋盘方块交界点排列,6行8列 real_coor = np.zeros((cross_corners[0] * cross_corners[1], 3), np.float32) real_coor[:, :2] = np.mgrid[0:6, 0:8].T.reshape(-1, 2) real_points = [] real_points_x_y = [] pic_points = [] for pic in pic_name: pic_path = os.path.join(file_dir, pic) pic_data = cv2.imread(pic_path) # 寻找到棋盘角点 succ, pic_coor = cv2.findChessboardCorners(pic_data, (cross_corners[0], cross_corners[1]), None) # 显示角点 cv2.drawChessboardCorners(pic_data, (cross_corners[0], cross_corners[1]), pic_coor, succ) cv2.namedWindow('View') cv2.imshow("View", pic_data) cv2.waitKey(0) cv2.destroyAllWindows() if succ: # 添加每幅图的对应3D-2D坐标 pic_coor = pic_coor.reshape(-1, 2) pic_points.append(pic_coor) # 图像角点坐标(48,2) real_points.append(real_coor) # 真实角点的坐标(48,3),相对坐标,其中Z=0 real_points_x_y.append(real_coor[:, :2]) # 真实角点的X,Y self.calibrate(pic_points,real_points_x_y,real_points)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
上述代码中导入的文件有:
在该代码的同根目录下新建文件夹step,在文件夹中放入如下文件:
1 distortion.py求解畸变矫正系数
2 extrinsics.py求解外参矩阵
3 homography.py 求解单应性矩阵
4 intrinsics.py求解内参矩阵
5 refine_all微调参数
- 1
- 2
- 3
- 4
- 5
2.1 distortion.py求解畸变矫正系数
""" 2022.2.2 author:alian distortion.py求解畸变矫正系数 """ import numpy as np # 返回畸变矫正系数k0,k1 def get_distortion(intrinsic_param, extrinsic_param, pic_coor, real_coor): D = [] d = [] for i in range(len(pic_coor)): for j in range(len(pic_coor[i])): # 转换为齐次坐标 single_coor = np.array([(real_coor[i])[j, 0], (real_coor[i])[j, 1], 0, 1]) # 利用现有内参及外参求出估计图像坐标 u = np.dot(np.dot(intrinsic_param, extrinsic_param[i]), single_coor) [u_estim, v_estim] = [u[0] / u[2], u[1] / u[2]] coor_norm = np.dot(extrinsic_param[i], single_coor) coor_norm /= coor_norm[-1] # r = np.linalg.norm((real_coor[i])[j]) r = np.linalg.norm(coor_norm) D.append(np.array([(u_estim - intrinsic_param[0, 2]) * r ** 2, (u_estim - intrinsic_param[0, 2]) * r ** 4])) D.append(np.array([(v_estim - intrinsic_param[1, 2]) * r ** 2, (v_estim - intrinsic_param[1, 2]) * r ** 4])) # 求出估计坐标与真实坐标的残差 d.append(pic_coor[i][j, 0] - u_estim) d.append(pic_coor[i][j, 1] - v_estim) ''' D.append(np.array([(pic_coor[i][j, 0] - intrinsic_param[0, 2]) * r ** 2, (pic_coor[i][j, 0] - intrinsic_param[0, 2]) * r ** 4])) D.append(np.array([(pic_coor[i][j, 1] - intrinsic_param[1, 2]) * r ** 2, (pic_coor[i][j, 1] - intrinsic_param[1, 2]) * r ** 4])) #求出估计坐标与真实坐标的残差 d.append(u_estim - pic_coor[i][j, 0]) d.append(v_estim - pic_coor[i][j, 1]) ''' D = np.array(D) temp = np.dot(np.linalg.inv(np.dot(D.T, D)), D.T) k = np.dot(temp, d) ''' #也可利用SVD求解D * k = d中的k U, S, Vh=np.linalg.svd(D, full_matrices=False) temp_S = np.array([[S[0], 0], [0, S[1]]]) temp_res = np.dot(Vh.transpose(), np.linalg.inv(temp_S)) temp_res_res = np.dot(temp_res, U.transpose()) k = np.dot(temp_res_res, d) ''' return k
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
2.2 extrinsics.py求解外参矩阵
""" 2022.2.2 author:alian extrinsics.py求解外参矩阵 """ import numpy as np #返回每一幅图的外参矩阵[R|t] def get_extrinsics_param(H, intrinsics_param): extrinsics_param = [] inv_intrinsics_param = np.linalg.inv(intrinsics_param) for i in range(len(H)): h0 = (H[i].reshape(3, 3))[:, 0] h1 = (H[i].reshape(3, 3))[:, 1] h2 = (H[i].reshape(3, 3))[:, 2] scale_factor = 1 / np.linalg.norm(np.dot(inv_intrinsics_param, h0)) r0 = scale_factor * np.dot(inv_intrinsics_param, h0) r1 = scale_factor * np.dot(inv_intrinsics_param, h1) t = scale_factor * np.dot(inv_intrinsics_param, h2) r2 = np.cross(r0, r1) R = np.array([r0, r1, r2, t]).transpose() extrinsics_param.append(R) return extrinsics_param
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
2.3 homography.py 求解单应性矩阵
""" 2022.2.2 author:alian homography.py 求解单应性矩阵 """ import numpy as np from scipy import optimize as opt #求输入数据的归一化矩阵 def normalizing_input_data(coor_data): x_avg = np.mean(coor_data[:, 0]) y_avg = np.mean(coor_data[:, 1]) sx = np.sqrt(2) / np.std(coor_data[:, 0]) sy = np.sqrt(2) / np.std(coor_data[:, 1]) norm_matrix = np.matrix([[sx, 0, -sx * x_avg], [0, sy, -sy * y_avg], [0, 0, 1]]) return norm_matrix #求取初始估计的单应矩阵 def get_initial_H(pic_coor, real_coor): # 获得归一化矩阵 pic_norm_mat = normalizing_input_data(pic_coor) real_norm_mat = normalizing_input_data(real_coor) M = [] for i in range(len(pic_coor)): #转换为齐次坐标 single_pic_coor = np.array([pic_coor[i][0], pic_coor[i][1], 1]) single_real_coor = np.array([real_coor[i][0], real_coor[i][1], 1]) #坐标归一化 pic_norm = np.dot(pic_norm_mat, single_pic_coor) real_norm = np.dot(real_norm_mat, single_real_coor) #构造M矩阵 M.append(np.array([-real_norm.item(0), -real_norm.item(1), -1, 0, 0, 0, pic_norm.item(0) * real_norm.item(0), pic_norm.item(0) * real_norm.item(1), pic_norm.item(0)])) M.append(np.array([0, 0, 0, -real_norm.item(0), -real_norm.item(1), -1, pic_norm.item(1) * real_norm.item(0), pic_norm.item(1) * real_norm.item(1), pic_norm.item(1)])) #利用SVD求解M * h = 0中h的解 U, S, VT = np.linalg.svd((np.array(M, dtype='float')).reshape((-1, 9))) # 最小的奇异值对应的奇异向量,S求出来按大小排列的,最后的最小 H = VT[-1].reshape((3, 3)) H = np.dot(np.dot(np.linalg.inv(pic_norm_mat), H), real_norm_mat) H /= H[-1, -1] return H #返回估计坐标与真实坐标偏差 def value(H, pic_coor, real_coor): Y = np.array([]) for i in range(len(real_coor)): single_real_coor = np.array([real_coor[i, 0], real_coor[i, 1], 1]) U = np.dot(H.reshape(3, 3), single_real_coor) U /= U[-1] Y = np.append(Y, U[:2]) Y_NEW = (pic_coor.reshape(-1) - Y) return Y_NEW #返回对应jacobian矩阵 def jacobian(H, pic_coor, real_coor): J = [] for i in range(len(real_coor)): sx = H[0]*real_coor[i][0] + H[1]*real_coor[i][1] +H[2] sy = H[3]*real_coor[i][0] + H[4]*real_coor[i][1] +H[5] w = H[6]*real_coor[i][0] + H[7]*real_coor[i][1] +H[8] w2 = w * w J.append(np.array([real_coor[i][0]/w, real_coor[i][1]/w, 1/w, 0, 0, 0, -sx*real_coor[i][0]/w2, -sx*real_coor[i][1]/w2, -sx/w2])) J.append(np.array([0, 0, 0, real_coor[i][0]/w, real_coor[i][1]/w, 1/w, -sy*real_coor[i][0]/w2, -sy*real_coor[i][1]/w2, -sy/w2])) return np.array(J) #利用Levenberg Marquart算法微调H def refine_H(pic_coor, real_coor, initial_H): initial_H = np.array(initial_H) final_H = opt.leastsq(value, initial_H, Dfun=jacobian, args=(pic_coor, real_coor))[0] final_H /= np.array(final_H[-1]) return final_H #返回微调后的H def get_homography(pic_coor, real_coor): refined_homographies =[] error = [] for i in range(len(pic_coor)): initial_H = get_initial_H(pic_coor[i], real_coor[i]) final_H = refine_H(pic_coor[i], real_coor[i], initial_H) refined_homographies.append(final_H) return np.array(refined_homographies)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
2.4 intrinsics.py求解内参矩阵
""" 2022.2.2 author:alian intrinsics.py求解内参矩阵 """ import numpy as np #返回pq位置对应的v向量 def create_v(p, q, H): H = H.reshape(3, 3) return np.array([ H[0, p] * H[0, q], H[0, p] * H[1, q] + H[1, p] * H[0, q], H[1, p] * H[1, q], H[2, p] * H[0, q] + H[0, p] * H[2, q], H[2, p] * H[1, q] + H[1, p] * H[2, q], H[2, p] * H[2, q] ]) #返回相机内参矩阵A def get_intrinsics_param(H): #构建V矩阵 V = np.array([]) for i in range(len(H)): V = np.append(V, np.array([create_v(0, 1, H[i]), create_v(0, 0 , H[i])- create_v(1, 1 , H[i])])) #求解V*b = 0中的b U, S, VT = np.linalg.svd((np.array(V, dtype='float')).reshape((-1, 6))) #最小的奇异值对应的奇异向量,S求出来按大小排列的,最后的最小 b = VT[-1] #求取相机内参 w = b[0] * b[2] * b[5] - b[1] * b[1] * b[5] - b[0] * b[4] * b[4] + 2 * b[1] * b[3] * b[4] - b[2] * b[3] * b[3] d = b[0] * b[2] - b[1] * b[1] alpha = np.sqrt(w / (d * b[0])) beta = np.sqrt(w / d**2 * b[0]) gamma = np.sqrt(w / (d**2 * b[0])) * b[1] uc = (b[1] * b[4] - b[2] * b[3]) / d vc = (b[1] * b[3] - b[0] * b[4]) / d return np.array([ [alpha, gamma, uc], [0, beta, vc], [0, 0, 1] ])
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
2.5 refine_all微调参数
""" 2022.2.2 author:alian refine_all微调参数 """ import numpy as np import math from scipy import optimize as opt #微调所有参数 def refinall_all_param(A, k, W, real_coor, pic_coor): #整合参数 P_init = compose_paramter_vector(A, k, W) #复制一份真实坐标 X_double = np.zeros((2 * len(real_coor) * len(real_coor[0]), 3)) Y = np.zeros((2 * len(real_coor) * len(real_coor[0]))) M = len(real_coor) N = len(real_coor[0]) for i in range(M): for j in range(N): X_double[(i * N + j) * 2] = (real_coor[i])[j] X_double[(i * N + j) * 2 + 1] = (real_coor[i])[j] Y[(i * N + j) * 2] = (pic_coor[i])[j, 0] Y[(i * N + j) * 2 + 1] = (pic_coor[i])[j, 1] #微调所有参数 P = opt.leastsq(value, P_init, args=(W, real_coor, pic_coor), Dfun=jacobian)[0] #raial_error表示利用标定后的参数计算得到的图像坐标与真实图像坐标点的平均像素距离 error = value(P, W, real_coor, pic_coor) raial_error = [np.sqrt(error[2 * i]**2 + error[2 * i + 1]**2) for i in range(len(error) // 2)] print("total max error:\t", np.max(raial_error)) #返回拆解后参数,分别为内参矩阵,畸变矫正系数,每幅图对应外参矩阵 return decompose_paramter_vector(P) #把所有参数整合到一个数组内 def compose_paramter_vector(A, k, W): alpha = np.array([A[0, 0], A[1, 1], A[0, 1], A[0, 2], A[1, 2], k[0], k[1]]) P = alpha for i in range(len(W)): R, t = (W[i])[:, :3], (W[i])[:, 3] #旋转矩阵转换为一维向量形式 zrou = to_rodrigues_vector(R) w = np.append(zrou, t) P = np.append(P, w) return P #分解参数集合,得到对应的内参,外参,畸变矫正系数 def decompose_paramter_vector(P): [alpha, beta, gamma, uc, vc, k0, k1] = P[0:7] A = np.array([[alpha, gamma, uc], [0, beta, vc], [0, 0, 1]]) k = np.array([k0, k1]) W = [] M = (len(P) - 7) // 6 for i in range(M): m = 7 + 6 * i zrou = P[m:m+3] t = (P[m+3:m+6]).reshape(3, -1) #将旋转矩阵一维向量形式还原为矩阵形式 R = to_rotation_matrix(zrou) #依次拼接每幅图的外参 w = np.concatenate((R, t), axis=1) W.append(w) W = np.array(W) return A, k, W #返回从真实世界坐标映射的图像坐标 def get_single_project_coor(A, W, k, coor): single_coor = np.array([coor[0], coor[1], coor[2], 1]) #''' coor_norm = np.dot(W, single_coor) coor_norm /= coor_norm[-1] #r = np.linalg.norm(coor) r = np.linalg.norm(coor_norm) uv = np.dot(np.dot(A, W), single_coor) uv /= uv[-1] #畸变 u0 = uv[0] v0 = uv[1] uc = A[0, 2] vc = A[1, 2] #u = (uc * r**2 * k[0] + uc * r**4 * k[1] - u0) / (r**2 * k[0] + r**4 * k[1] - 1) #v = (vc * r**2 * k[0] + vc * r**4 * k[1] - v0) / (r**2 * k[0] + r**4 * k[1] - 1) u = u0 + (u0 - uc) * r**2 * k[0] + (u0 - uc) * r**4 * k[1] v = v0 + (v0 - vc) * r**2 * k[0] + (v0 - vc) * r**4 * k[1] ''' uv = np.dot(W, single_coor) uv /= uv[-1] # 透镜矫正 x0 = uv[0] y0 = uv[1] r = np.linalg.norm(np.array([x0, y0])) k0 = 0 k1 = 0 x = x0 * (1 + r ** 2 * k0 + r ** 4 * k1) y = y0 * (1 + r ** 2 * k0 + r ** 4 * k1) #u = A[0, 0] * x + A[0, 2] #v = A[1, 1] * y + A[1, 2] [u, v, _] = np.dot(A, np.array([x, y, 1])) ''' return np.array([u, v]) #返回所有点的真实世界坐标映射到的图像坐标与真实图像坐标的残差 def value(P, org_W, X, Y_real): M = (len(P) - 7) // 6 N = len(X[0]) A = np.array([ [P[0], P[2], P[3]], [0, P[1], P[4]], [0, 0, 1] ]) Y = np.array([]) for i in range(M): m = 7 + 6 * i #取出当前图像对应的外参 w = P[m:m + 6] # 不用旋转矩阵的变换是因为会有精度损失 ''' R = to_rotation_matrix(w[:3]) t = w[3:].reshape(3, 1) W = np.concatenate((R, t), axis=1) ''' W = org_W[i] #计算每幅图的坐标残差 for j in range(N): Y = np.append(Y, get_single_project_coor(A, W, np.array([P[5], P[6]]), (X[i])[j])) error_Y = np.array(Y_real).reshape(-1) - Y return error_Y #计算对应jacobian矩阵 def jacobian(P, WW, X, Y_real): M = (len(P) - 7) // 6 N = len(X[0]) K = len(P) A = np.array([ [P[0], P[2], P[3]], [0, P[1], P[4]], [0, 0, 1] ]) res = np.array([]) for i in range(M): m = 7 + 6 * i w = P[m:m + 6] R = to_rotation_matrix(w[:3]) t = w[3:].reshape(3, 1) W = np.concatenate((R, t), axis=1) for j in range(N): res = np.append(res, get_single_project_coor(A, W, np.array([P[5], P[6]]), (X[i])[j])) #求得x, y方向对P[k]的偏导 J = np.zeros((K, 2 * M * N)) for k in range(K): J[k] = np.gradient(res, P[k]) return J.T #将旋转矩阵分解为一个向量并返回,Rodrigues旋转向量与矩阵的变换,最后计算坐标时并未用到,因为会有精度损失 def to_rodrigues_vector(R): p = 0.5 * np.array([[R[2, 1] - R[1, 2]], [R[0, 2] - R[2, 0]], [R[1, 0] - R[0, 1]]]) c = 0.5 * (np.trace(R) - 1) if np.linalg.norm(p) == 0: if c == 1: zrou = np.array([0, 0, 0]) elif c == -1: R_plus = R + np.eye(3, dtype='float') norm_array = np.array([np.linalg.norm(R_plus[:, 0]), np.linalg.norm(R_plus[:, 1]), np.linalg.norm(R_plus[:, 2])]) v = R_plus[:, np.where(norm_array == max(norm_array))] u = v / np.linalg.norm(v) if u[0] < 0 or (u[0] == 0 and u[1] < 0) or (u[0] == u[1] and u[0] == 0 and u[2] < 0): u = -u zrou = math.pi * u else: zrou = [] else: u = p / np.linalg.norm(p) theata = math.atan2(np.linalg.norm(p), c) zrou = theata * u return zrou #把旋转矩阵的一维向量形式还原为旋转矩阵并返回 def to_rotation_matrix(zrou): theta = np.linalg.norm(zrou) zrou_prime = zrou / theta W = np.array([[0, -zrou_prime[2], zrou_prime[1]], [zrou_prime[2], 0, -zrou_prime[0]], [-zrou_prime[1], zrou_prime[0], 0]]) R = np.eye(3, dtype='float') + W * math.sin(theta) + np.dot(W, W) * (1 - math.cos(theta)) return R
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
- 190
- 191
- 192
- 193
- 194
- 195
- 196
- 197
- 198
- 199
- 200
- 201
- 202
- 203
- 204
- 205
- 206
- 207
- 208
- 209
- 210
- 211
- 212
- 213
- 214
- 215
- 216
- 217
- 218
- 219
- 220
- 221
- 222
- 223
- 224
- 225
- 226
- 227
- 228
- 229
- 230
- 231
- 232
- 233
- 234
- 235
- 236
- 237
- 238
- 239

函数调用如下:
if __name__ == "__main__":
cam = CameraZed2(resolution='1080',fps=30)
# cam.grab_imgs() # 获取标定图像
cam.cal_exe() # 进行相机标定
- 1
- 2
- 3
- 4
结果如下:

声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/2023面试高手/article/detail/599357
推荐阅读
相关标签

