- 1基于微信小程序的餐厅点餐软件设计及开发_软件工程餐饮类的小程序设计方案
- 2算法在C语言编程中如何使用,算法的定义和特征,以及c语言在编程中如何应用?...
- 3小程序模拟更新微信_微信小程序模拟更新
- 4写一下EEMD+XGBoost+LightGBM+ConvLSTM可以用于多输入时间序列预测的代码
- 5mac无法读取移动硬盘怎么办?mac怎么使用ntfs硬盘_wd mac驱动 ntfs
- 6Docker中Kafka容器创建/更新Topic支持多分区_docker kafka 创建topic
- 7GitHub 移动端正式发布!
- 8Python游戏汇总:三十个pygame游戏代码【附源码免费分享】_游戏代码大全可复制
- 9Apache DolphinScheduler & 亚马逊云科技联合Meetup: 基于云上的最佳实践
- 10【踩坑】Flink无法使用Jedis连接redis服务器_flink map里不能序列化redis连接
电机控制系列模块解析(19)—— 反电势观测器_扩展反电动势观测器
赞
踩
随着现代工业自动化技术的飞速发展,交流电机作为关键的动力装置,其控制精度与效率日益受到重视。其中,无位置传感器控制技术由于其成本低、可靠性高、系统简洁等优点,逐渐成为研究热点。本文将对交流电机反电势观测器这一关键技术进行深入探讨,从基本原理、应用价值、主要类型、挑战与发展趋势等方面进行全面综述。
一、基本原理
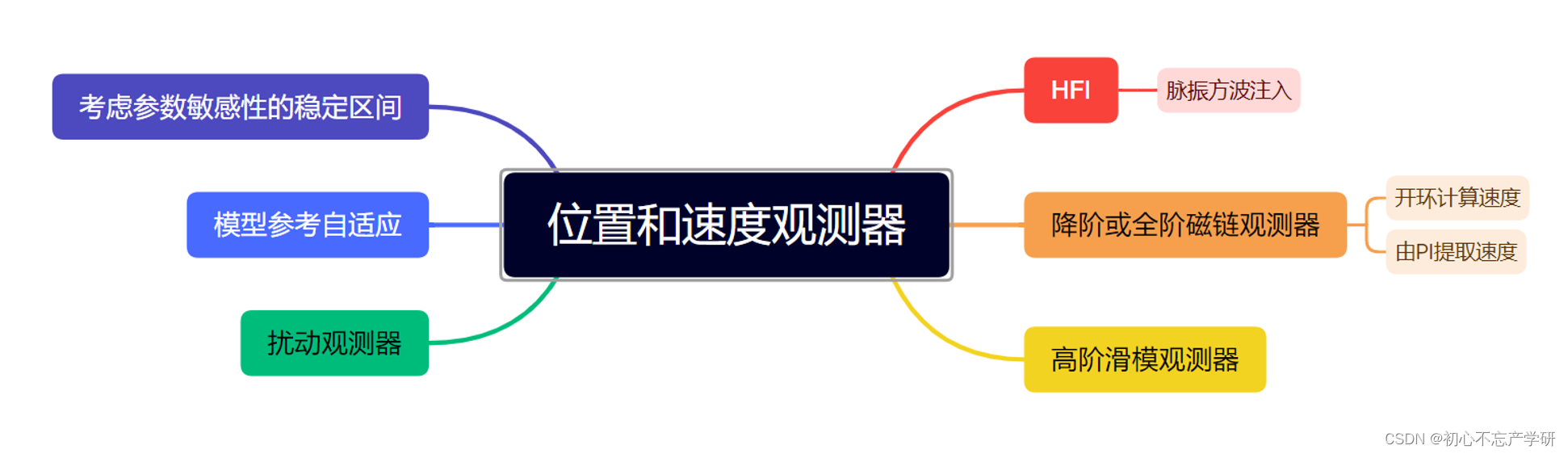
交流电机反电势观测器,又称为反电动势观测器(Back Electromotive Force, BEMF Observer),其核心思想是通过实时监测电机运行时的定子电流和电压,依据电机数学模型,推算出电机转子位置对应的反电势信号。反电势是电机转子磁场相对于定子绕组运动时产生的感应电动势,其幅值和频率与转子位置和速度直接相关。因此,准确观测反电势,即可实现对电机转子位置和速度的无传感器估计。
反电势观测器通常包含以下几个步骤:
1. **信号获取**:采集电机运行时的定子电压、电流信号,这些信号是观测反电势的基础数据。
2. **模型建立**:基于电机的物理特性(如电机参数、转子结构等),建立反电势与定子电压、电流之间的数学模型。对于不同类型的交流电机(如永磁同步电机、感应电机等),模型的具体形式会有所不同。
3. **实时计算**:利用所建立的数学模型,结合实时采集的电压、电流信号,通过数值计算或滤波算法(如滑模观测器、卡尔曼滤波器等)实时推算出反电势。
4. **位置/速度估计**:根据反电势的幅值、相位信息,结合电机电气角度关系,计算出转子的位置和速度信息,供控制系统使用。
二、应用价值
反电势观测器在交流电机无位置传感器控制中具有重要价值:
1. **降低成本与复杂性**:省去了传统的位置传感器(如编码器、旋转变压器等),降低了系统的硬件成本和维护复杂性,同时减少了因传感器故障导致的停机风险。
2. **提高系统可靠性**:尤其适用于恶劣环境(如高温、粉尘、振动等)下运行的电机,以及对可靠性要求极高的应用领域(如航空航天、轨道交通等)。
3. **适应性强**:对电机参数变化和外部扰动有一定的鲁棒性,可通过软件算法调整以适应不同工况,提高了电机控制系统的灵活性。
三、主要类型
根据所采用的观测算法和应用场合的不同,反电势观测器主要分为以下几类:
1. **基于模型的观测器**:如Luenberger观测器、滑模观测器(SMO)、扩展卡尔曼滤波器(EKF)等。这类观测器基于电机精确的数学模型,通过实时计算得到反电势估计值。
2. **基于信号处理的观测器**:如锁相环(PLL)观测器、频谱分析法等。这类观测器侧重于从电压、电流信号中提取反电势的特征信息,适用于特定的电机类型或运行条件。
3. **混合型观测器**:结合以上两种方法的优点,如模型辅助的锁相环观测器、自适应观测器等。这类观测器既利用了电机模型信息,又利用了信号处理技术,以提高观测精度和鲁棒性。
四、挑战与发展趋势
尽管反电势观测器在无位置传感器控制中展现出显著优势,但仍面临以下挑战:
1. **观测精度与稳定性**:在低速、启动、负载突变等复杂工况下,观测精度和稳定性易受影响,需要持续优化观测算法,如引入自适应、鲁棒控制理论。
2. **硬件资源与实时性约束**:嵌入式系统中有限的计算资源和严格的实时性要求限制了复杂观测器算法的应用,需发展高效、轻量级的观测器结构和算法。
3. **电机参数依赖与初始值敏感**:观测器性能受电机参数精确性影响,且对初始值设置敏感,需研发在线参数辨识和智能初始化策略。
面对挑战,反电势观测器的发展趋势如下:
1. **智能化观测技术**:利用深度学习、数据驱动等先进方法,构建智能观测器,以适应更广泛的电机类型和复杂工况。
2. **集成化与协同设计**:将观测器与电机控制器、驱动器等硬件设备进行深度融合,实现软硬件协同优化,提高整体性能。
3. **标准化与模块化**:制定统一的观测器设计规范和接口标准,推动观测器模块化设计,便于在不同电机控制系统中快速部署和应用。
总结而言,交流电机反电势观测器作为无位置传感器控制的关键技术,通过精确估算反电势以获取转子位置和速度信息,极大地推动了交流电机控制技术的发展。面对现有挑战,科研人员将持续探索创新方法,提升观测器性能,拓展其应用范围,以满足现代工业自动化对高精度、高可靠性和低成本电机控制的需求。
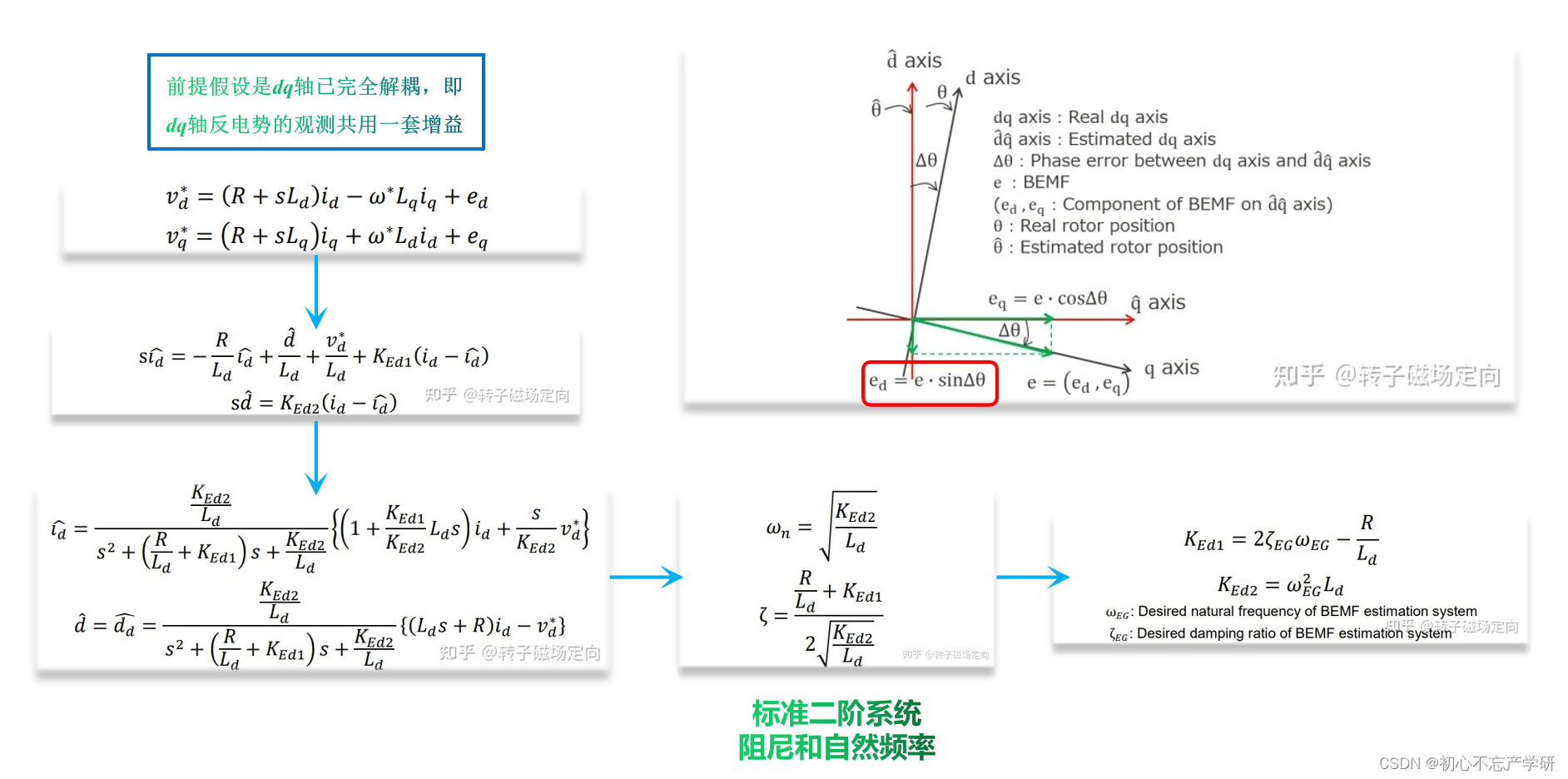
以下图片还演示了反电势观测器的增益计算过程,其是一种低成本的、使用较多的商用方案
借用一下某知乎博主的文章,整理可到一个最简单的反电势观测器(12年Seung-Ki Sul论文)
五、已有的改进措施
从工程角度追求极致性价比,对反电势观测器的设计、优化和调试可采取以下改进措施:
1. 简化观测器结构与算法
-
选择适合应用场景的观测器类型:针对不同的电机类型、工作条件和控制需求,选用最经济、最有效的观测器结构,如基于Luenberger的线性观测器、滑模观测器(SMO)、扩展卡尔曼滤波器(EKF)等。避免过度设计,确保观测器结构与实际需求匹配。
-
降低算法复杂度:简化算法逻辑,减少计算量大的环节,如减少状态变量数量、采用低阶模型、优化递归公式等。在保证观测精度的前提下,尽量减少浮点运算和矩阵操作,提高实时计算效率。
-
硬件加速与代码优化:利用嵌入式处理器的并行计算能力,如DSP、FPGA等,对观测器算法进行硬件加速。同时,进行代码优化,如循环展开、向量化计算、内存访问优化等,降低CPU负载,提高执行效率。
2. 在线参数辨识与自适应控制
-
参数自适应:设计参数在线辨识算法,实时更新电机参数估计,以减少参数不确定性对观测器性能的影响。例如,利用电机运行过程中的电流、电压信号进行在线辨识,根据辨识结果动态调整观测器增益。
-
鲁棒控制:引入鲁棒控制理论,设计观测器对电机参数变化和外部扰动具有较强抑制能力。如采用H∞观测器、自适应观测器等,增强观测器的稳健性。
3. 初始值设定与观测器初始化
-
智能初始化:采用基于电机空载运行数据的自动初始化、基于电机稳态特性的初始值推算等方法,确保观测器在启动阶段即可快速收敛至稳定工作状态。避免人工设定初始值带来的不确定性,提高观测器的启动性能。
-
故障恢复机制:设计观测器故障检测与恢复策略,如在观测误差超过阈值或系统发生异常时,自动触发重置或切换至备份观测器,确保系统稳定运行。
4. 信号处理与抗干扰措施
-
数字滤波:采用数字滤波器(如低通滤波器、卡尔曼滤波器等)对输入信号进行预处理,有效抑制高频噪声,保持信号的有用成分。合理选择滤波器参数,平衡噪声抑制效果与响应速度。
-
硬件抗干扰:优化传感器布局、选择抗干扰能力强的传感器和信号调理电路,减少噪声源头。在电路设计上采用屏蔽、接地等措施,增强系统的抗电磁干扰能力。
5. 系统集成与标准化
-
集成设计:将观测器与电机控制器、驱动器等硬件设备进行深度融合,共享资源,简化系统结构,降低总体成本。如将观测器算法固化在电机驱动芯片中,减少对外部处理器的依赖。
-
标准化接口与协议:制定统一的观测器设计规范和接口标准,便于在不同电机控制系统中快速部署和应用,降低开发和维护成本。
通过上述改进措施,可以从设计、优化、调试等多个层面提升反电势观测器的性价比,使其在满足高性能控制需求的同时,最大限度地降低系统成本,适应工程应用的实际需求。随着控制理论与计算机技术的发展,未来有望进一步优化观测器设计,使之更加适应复杂、苛刻的工业应用场景。