
热门标签
热门文章
- 1牛客网华为OD前端岗位,面试题库练习记录01_华为od前端面试题
- 2华为ensp 二层交换机的基础配置_华为二层交换机配置
- 3springboot集成rabbitmq商品秒杀业务实战(流量削峰)_rabbitmq削峰限流怎么做
- 4为什么我电脑的所有浏览器都开不了网页_所有浏览器都无法打开网页
- 5C#调用python的四种方法
- 6ES 8,大数据开发2024面试题
- 7身份证实名接口和身份证OCR接口的组合使用
- 8Redis: 缓存过期、缓存雪崩、缓存穿透、缓存击穿(热点)、缓存并发(热点)、多级缓存、布隆过滤器_缓存有失效时间吗
- 9R语言实现GWAS结果显著SNP位点归类提取与变异类型转化_从gwas中提取目标基因的相关参数
- 10【前端】npm常用命令
当前位置: article > 正文
MOVEIT初次安装及配置使用_moveit安装
作者:AllinToyou | 2024-04-23 05:14:47
赞
踩
moveit安装
moveit安装指令
sudo apt-get install ros-noetic-moveit
- 1
之后运行roslaunch moveit_setup_assistant setup_assistant.launch指令后报错如下
error while loading shared libraries: libfcl.so.0.6: cannot open shared object file: No such file or directory
- 1
检查后发现原因在于没有配置环境变量
source /opt/ros/noetic/setup.bash
- 1
配置后可正常运行
moveit配置
运行好的urdf模型一般是放在功能包里的,所以需要先将该功能包放到工作空间下,编译后配置好该工作空间的环境变量即可在moveit_setup_assistant下对该模型进行配置
具体配置选项功能
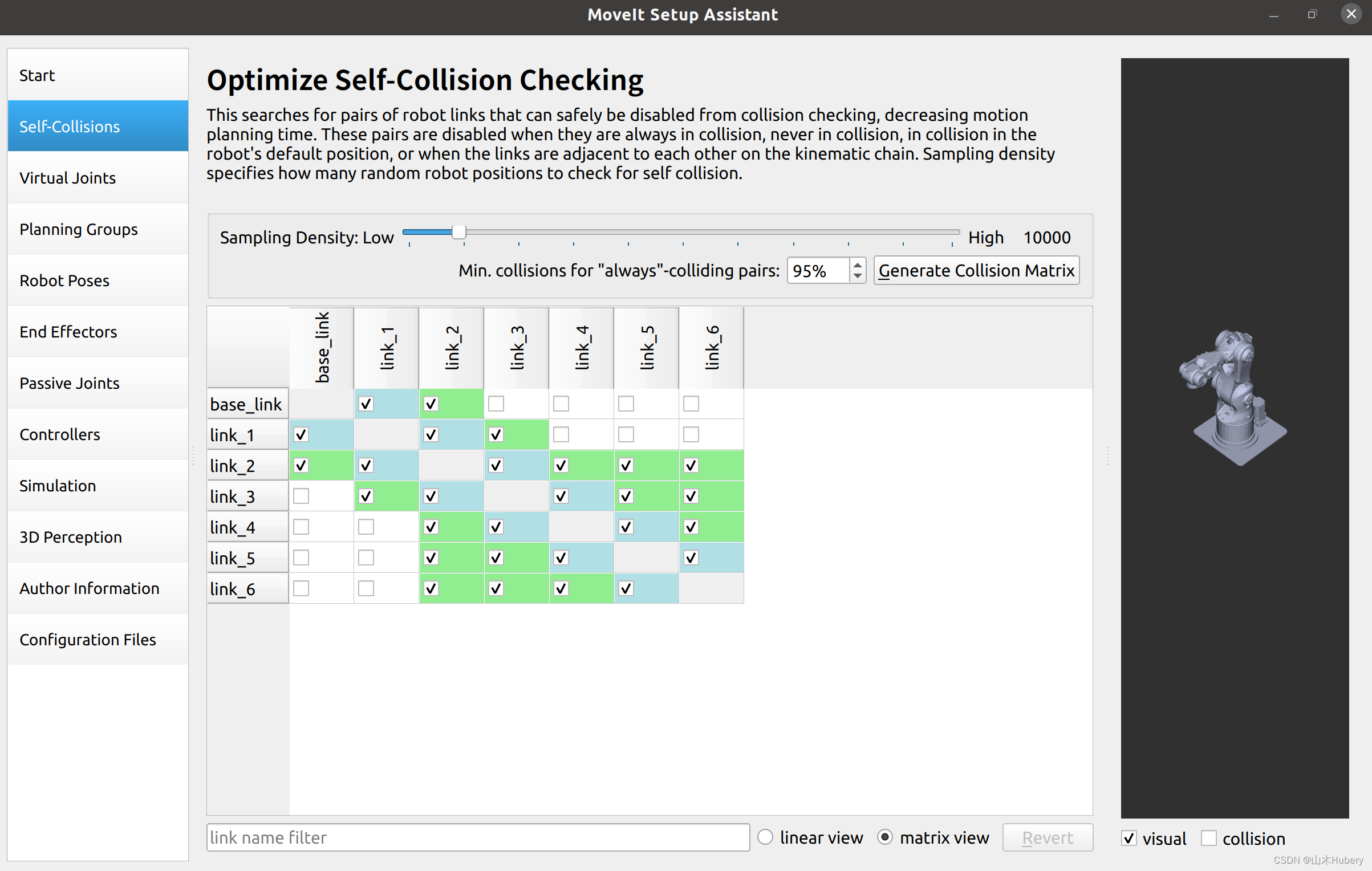
Self-Collisions:自碰撞检测 检测不同关节间是否有碰撞可能性,减小之后计算量
配置按如下配置即可(10000、95%、Genenrate)
 Virtual Joints:(虚拟关节)用于描述世界坐标系与根坐标系间的关系,像以上模型可直接忽略
Virtual Joints:(虚拟关节)用于描述世界坐标系与根坐标系间的关系,像以上模型可直接忽略
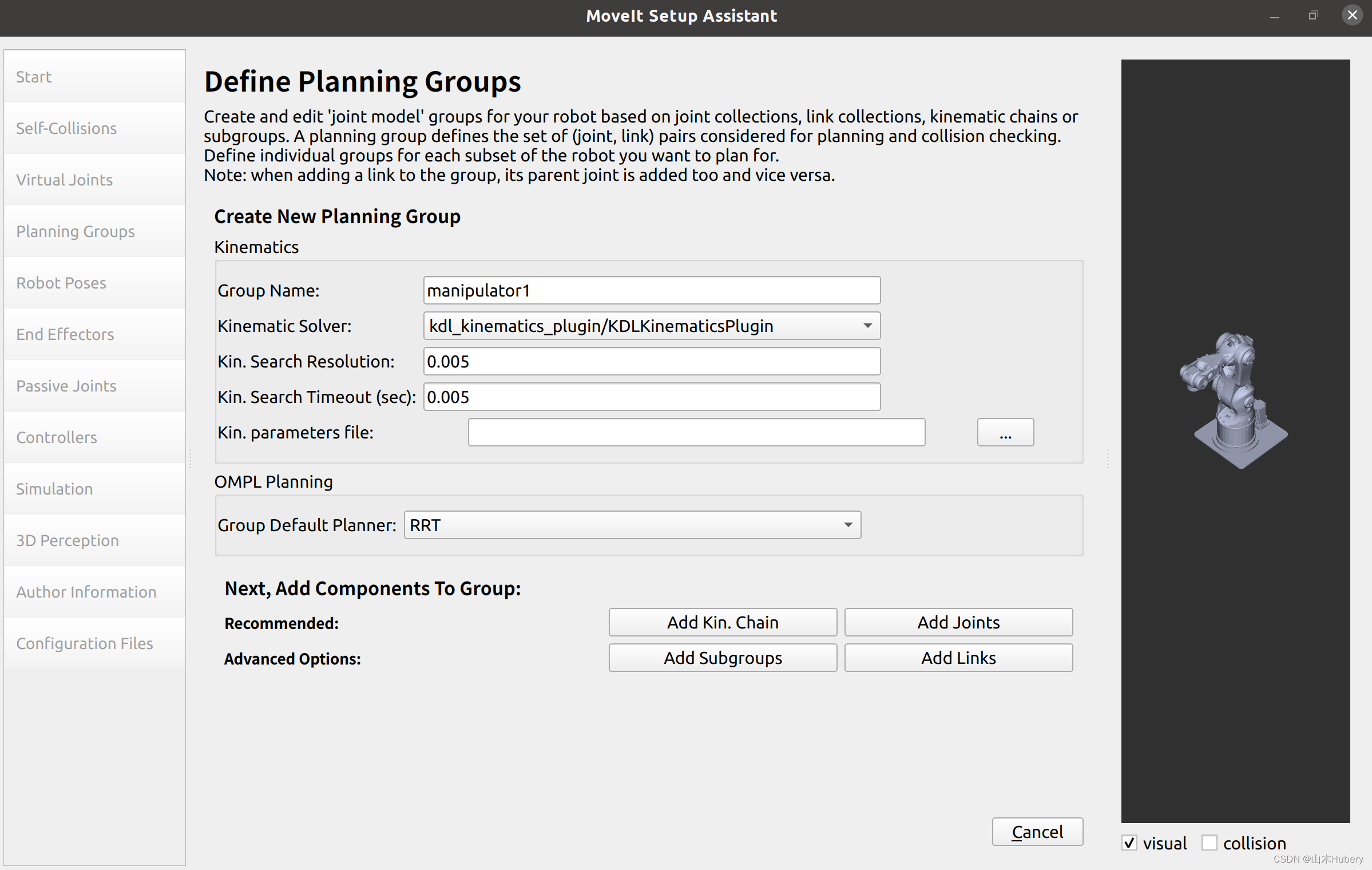
Planning Groups:(规划组)路径规划时的统一组别
操作:
Add group
再按如下界面配置
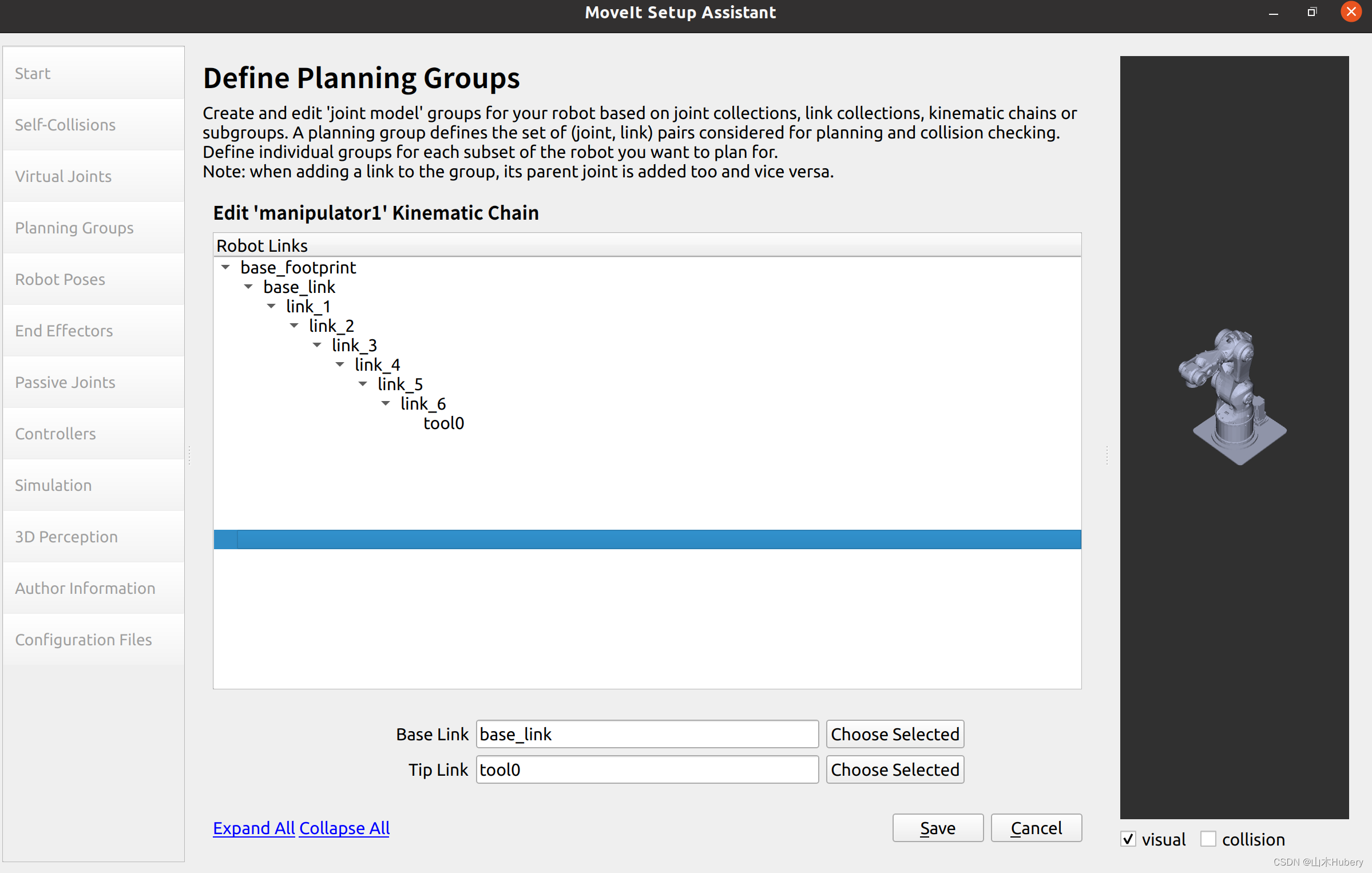
 选择Add Kin.Chain继续配置
选择Add Kin.Chain继续配置
Robot Poses:预定义机器人点位
点击add pose之后给予命名调整各关节角度即可
End Effectors:配置机器人终端夹具,此处无夹爪可跳过
Passive Joints:消极关节,即机器人运行时可不考虑其运动状态的关节,此处不存在这种关节,可跳过
Controllers:建议文件配置
Simulation:产生gazebo文件,建议手动配置
3D Perception:3D视觉接入,订阅3D视觉话题,此处可跳过
Author Information:个人信息填写,必填,否则无法生成功能包
Connfiguration Files:generate package即可
配置结果测试
用roslaunch运行生成的新功能包中的demo.launch,即可通过rviz对该模型进行操作
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/AllinToyou/article/detail/472326
推荐阅读
相关标签

