
热门标签
热门文章
- 1pytorch中Sequential( )的使用_pytorch sequential
- 2小程序中遇到的各种重难点(md5加密解密)_微信小程序md5
- 3Spring boot 导出/导入 Excel 步骤
- 4任务5:ChatGPT实体抽取_chat gpt抽取实体
- 5雷达回波模拟仿真(二):相参积累(以LFM为例)matlab_matlab雷达载频f0=10e9; 是十的十次方吗
- 6pycharm控制STM32F103ZET6拍照并上位机接收显示(OV7670、照相机、STM32、TFTLCD)_stm32f103zet6能进行图片传输吗
- 7Qt6.5 LTS发布_qt lts
- 8爱心代码,烟花代码,附带教程,手残党也能学会!!_php爱心的模板代码
- 9Windows下运行sh文件_windows sh start_ranklist_labler.sh
- 10程序员必读:初入职场避坑指南_程序员刚开始找工作避坑
当前位置: article > 正文
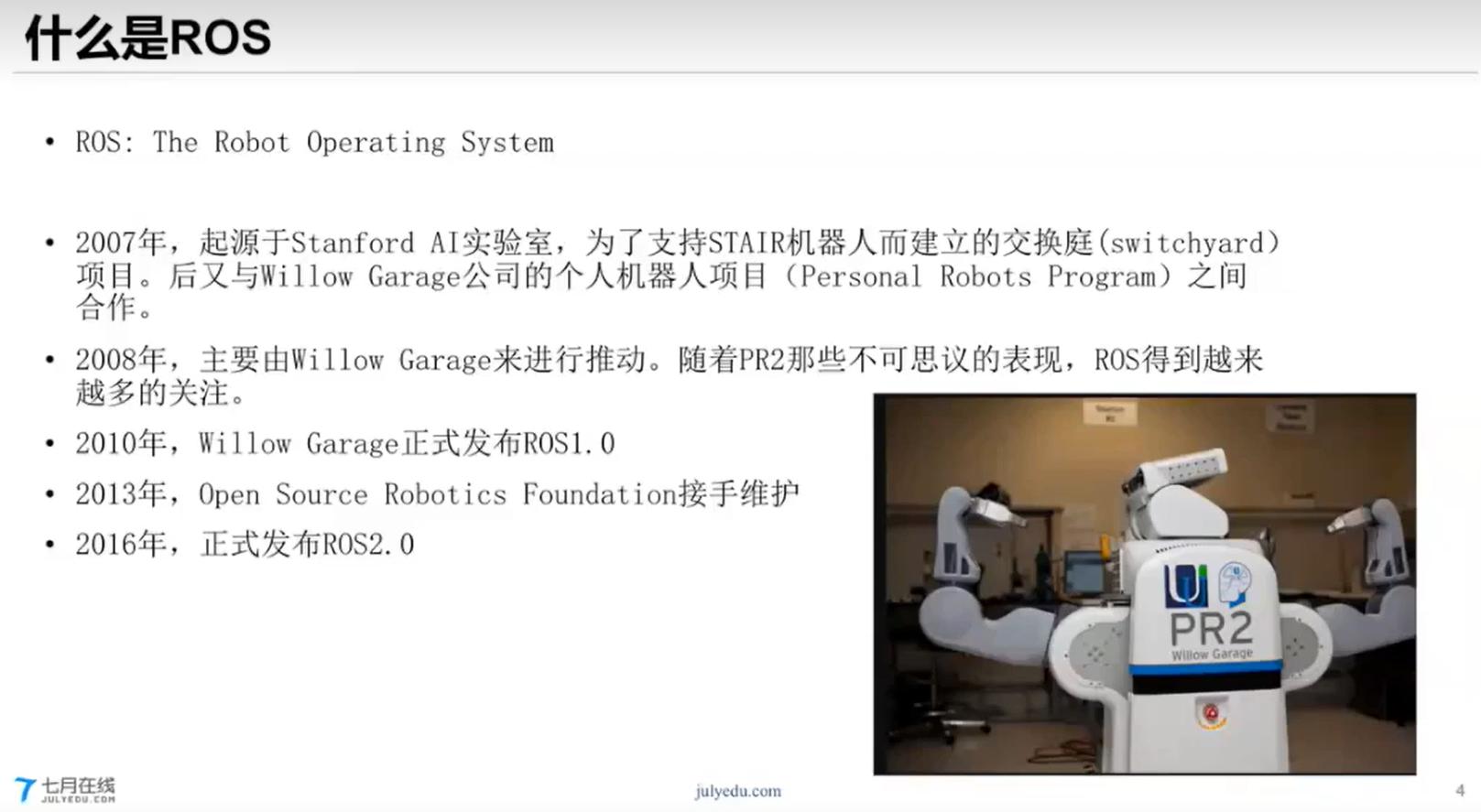
自动驾驶-第02课软件环境基础(ROSCMake)
作者:AllinToyou | 2024-05-05 17:01:03
赞
踩
自动驾驶-第02课软件环境基础(ROSCMake)

 3. ROS通信
3. ROS通信

声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/AllinToyou/article/detail/539930
推荐阅读
相关标签

