
热门标签
热门文章
- 1pytorch中Sequential( )的使用_pytorch sequential
- 2小程序中遇到的各种重难点(md5加密解密)_微信小程序md5
- 3Spring boot 导出/导入 Excel 步骤
- 4任务5:ChatGPT实体抽取_chat gpt抽取实体
- 5雷达回波模拟仿真(二):相参积累(以LFM为例)matlab_matlab雷达载频f0=10e9; 是十的十次方吗
- 6pycharm控制STM32F103ZET6拍照并上位机接收显示(OV7670、照相机、STM32、TFTLCD)_stm32f103zet6能进行图片传输吗
- 7Qt6.5 LTS发布_qt lts
- 8爱心代码,烟花代码,附带教程,手残党也能学会!!_php爱心的模板代码
- 9Windows下运行sh文件_windows sh start_ranklist_labler.sh
- 10程序员必读:初入职场避坑指南_程序员刚开始找工作避坑
当前位置: article > 正文
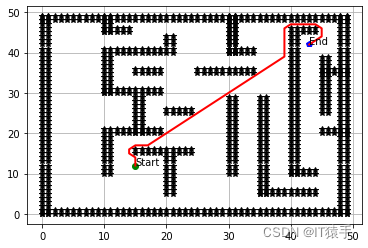
机器人路径规划:基于改进型A*算法的机器人路径规划(提供Python代码)_a*算法路径规划python
作者:AllinToyou | 2024-05-06 05:46:43
赞
踩
a*算法路径规划python
一、A*算法介绍
A*算法最早可追溯到1968年,在IEEE Transactions on Systems Science and Cybernetics中的论文A Formal Basis for the Heuristic Determination of Minimum Cost Paths中首次提出。
https://blog.csdn.net/weixin_46204734/article/details/136790525
参考文献:
[1] Hart P E ,MEMBER,IEEE,et al.A Formal Basis for the Heuristic Determination of Minimum Cost Paths[J].IEEE Transactions on Systems Science and Cybernetics, 2007, 4(2):100-107.DOI:10.1109/TSSC.1968.300136.
[2] Hart P E , Nilsson N J , Raphael B .A Formal Basis for the Heuristic Determination of Minimum Cost Paths[J].IEEE Transactions on Systems Science & Cybernetics, 1972, 4(2):28-29.DOI:10.1145/1056777.1056779.
[2]张海涛,程荫杭.基于A*算法的全局路径搜索[J].微计算机信息, 2007(17):3.DOI:10.3969/j.issn.1008-0570.2007.17.095.
二、部分代码
- import numpy as np
- import matplotlib.pyplot as plt
-
- show_animation = False
- use_beam_search = False
- use_iterative_deepening = False
- use_dynamic_weighting = False
- use_theta_star = False
- use_jump_point = False
-
- beam_capacity = 30
- max_theta = 5
- only_corners = False
- max_corner = 5
- w, epsilon, upper_bound_depth = 1, 4, 500
-
-
- def draw_horizontal_line(start_x, start_y, length, o_x, o_y, o_dict):
- for i in range(start_x, start_x + length):
- for j in range(start_y, start_y + 2):
- o_x.append(i)
- o_y.append(j)
- o_dict[(i, j)] = True
-
-
- def draw_vertical_line(start_x, start_y, length, o_x, o_y, o_dict):
- for i in range(start_x, start_x + 2):
- for j in range(start_y, start_y + length):
- o_x.append(i)
- o_y.append(j)
- o_dict[(i, j)] = True
-
-
- def in_line_of_sight(obs_grid, x1, y1, x2, y2):
- t = 0
- while t <= 0.5:
- xt = (1 - t) * x1 + t * x2
- yt = (1 - t) * y1 + t * y2
- if obs_grid[(int(xt), int(yt))]:
- return False, None
- xt = (1 - t) * x2 + t * x1
- yt = (1 - t) * y2 + t * y1
- if obs_grid[(int(xt), int(yt))]:
- return False, None
- t += 0.001
- dist = np.linalg.norm(np.array([x1, y1] - np.array([x2, y2])))
- return True, dist

三、部分结果




四、完整Python代码
见下方联系方式
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/AllinToyou/article/detail/542762
推荐阅读

相关标签

