
热门标签
热门文章
- 1【计算机网络基础——系列3】输入url后页面会遇到的问题_url 能打开接口,浏览器收不到
- 2TCL语言(一)
- 3DDS 信号发生器实验_基于dds的正弦波发生器
- 4Win10计算机首次使用时间,在Win10中使用域帐户首次登陆域控需要10分钟的时间?...
- 5CANOE动态链接库CAPLDLL生成_canoe dll文件位置
- 6C语言进阶:动态内存管理_内存释放不置空
- 7N 年沉淀,机器学习终于开源!
- 8MacBookPro使用ParallelsDesktop17安装Win10、Win11,支持M1芯片_macbook m1 win11 parralles csdn
- 9【踩坑笔记】git如何忽略已经提交的文件 (.gitignore文件无效)_git 忽略规则对已提交的
- 10zookeeper is not a recognized option解决方案_z is not a recog
当前位置: article > 正文
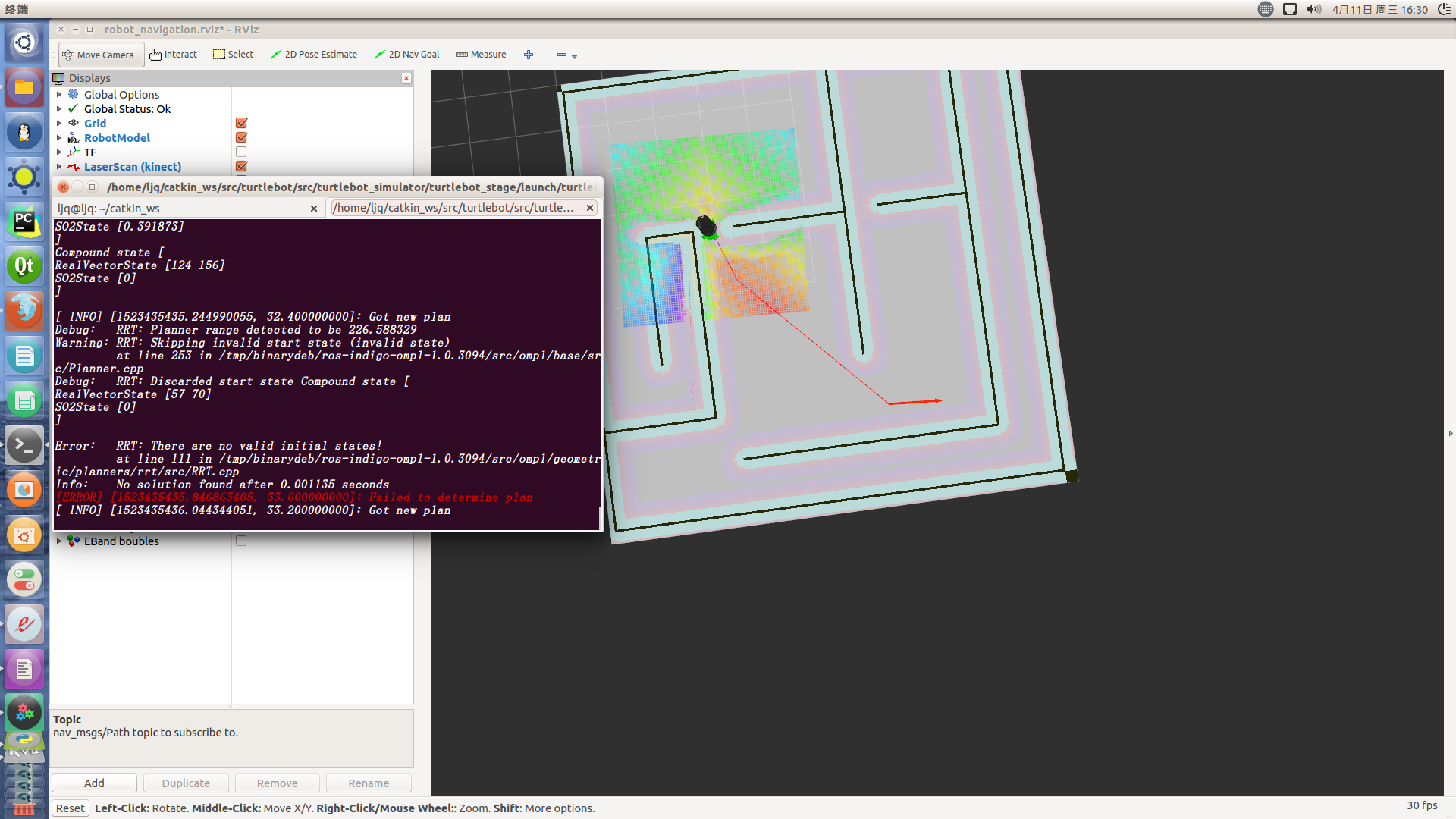
基于OMPL实现的ROS turtlebot 路径规划_ros导航 ompl
作者:AllinToyou | 2024-05-25 20:19:56
赞
踩
ros导航 ompl
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/AllinToyou/article/detail/623612
推荐阅读
相关标签

